







 该专栏为热销专栏榜 第8名
该专栏为热销专栏榜 第8名一、本文介绍
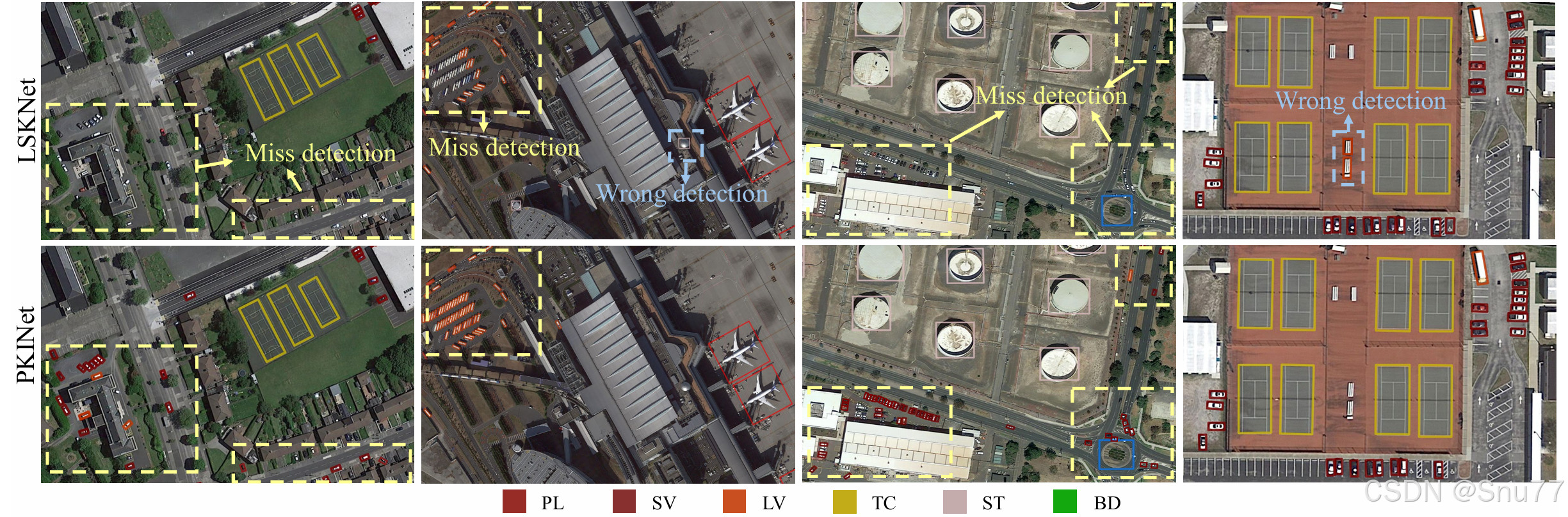
本文给大家带来的最新改进机制是PKINet网络提出的CAA注意力机制, 其首先通过平均池化和一个 1x1 卷积获取局部区域的特征。接着应用两个深度分离的条状卷积,一个是水平方向,另一个是垂直方向。这种条状卷积可以模拟大核卷积,但计算成本低,轻量化。这种配置在捕捉桥梁等拉长的物体结构上特别有效。本文将其用于二次创新PSA和另外一种使用方式,本文内容为个人整理,文章内含有代码 + 添加教程 + 使用方式。
欢迎大家订阅我的专栏一起学习YOLO!
目录
本文给大家带来的最新改进机制是PKINet网络提出的CAA注意力机制, 其首先通过平均池化和一个 1x1 卷积获取局部区域的特征。接着应用两个深度分离的条状卷积,一个是水平方向,另一个是垂直方向。这种条状卷积可以模拟大核卷积,但计算成本低,轻量化。这种配置在捕捉桥梁等拉长的物体结构上特别有效。本文将其用于二次创新PSA和另外一种使用方式,本文内容为个人整理,文章内含有代码 + 添加教程 + 使用方式。
欢迎大家订阅我的专栏一起学习YOLO!
目录

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


















 294
294







