






目录
(图片来源于网络,侵权立删)
一、视觉感知要素:
尽管数字图像处理是建立在数学和概率公式基础上的,但在选择何种处理技术时,人的直觉与分析起着核心作用。这种选择往往是基于主观的视觉判断做出的,因此想要使得数字图像处理更为贴合人类视觉,研究这些视觉感知要素是非常必要的。
1. 图像形成
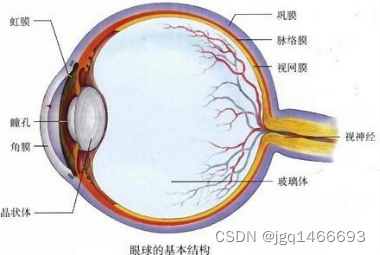
图1 人眼结构
在图像形成过程中,聚焦行为是不可或缺的,我们日常使用的照相机中镜头是有固定焦距的,为使之能够实现各种距离的聚焦,我们需要调整镜头与成像平面之间的距离。胶片置于成像平面上。不同照相机,我们人眼的成像因晶状体与视网膜之间的距离固定,实现不同距离的聚焦只能是通过改变晶状体形状达成的。
成像主要以电磁波发射的能量为基础,电磁波谱可以用波长、频率或能量来加以描述。
波长与频率关系:; 能量公式:
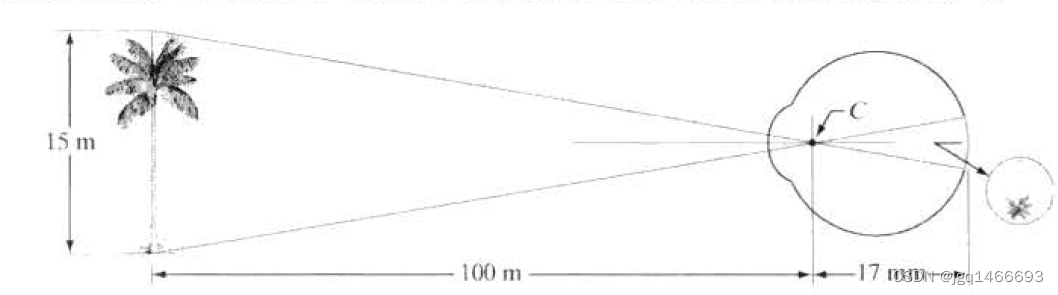 图2 人眼成像示意图
图2 人眼成像示意图
2.亮度适应与鉴别
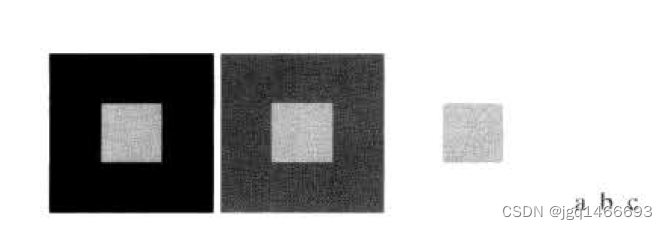
数字图像是作为离散的灰度集显示的,因此对于不同亮度级别之间的辨别能力在显示图像处理结果中是一项重要考虑因素。人体的视觉系统所能够适应的光强度级别从暗阈值到强闪光之间有个量级。
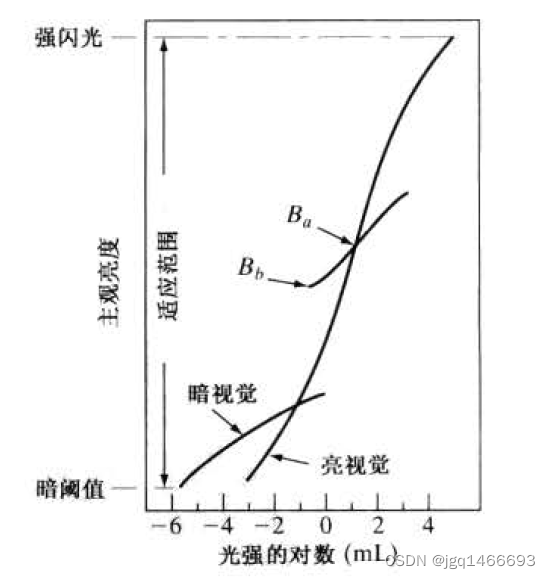 右图显示的是人体视觉系统能够感知到亮度的范围,我们一般将其称为主观亮度。
右图显示的是人体视觉系统能够感知到亮度的范围,我们一般将其称为主观亮度。
实际上,我们人眼能够感知到的强度并不是简单的强度的函数,为证明这一说法科学家们对此进行的深入研究并发现了两种现象:
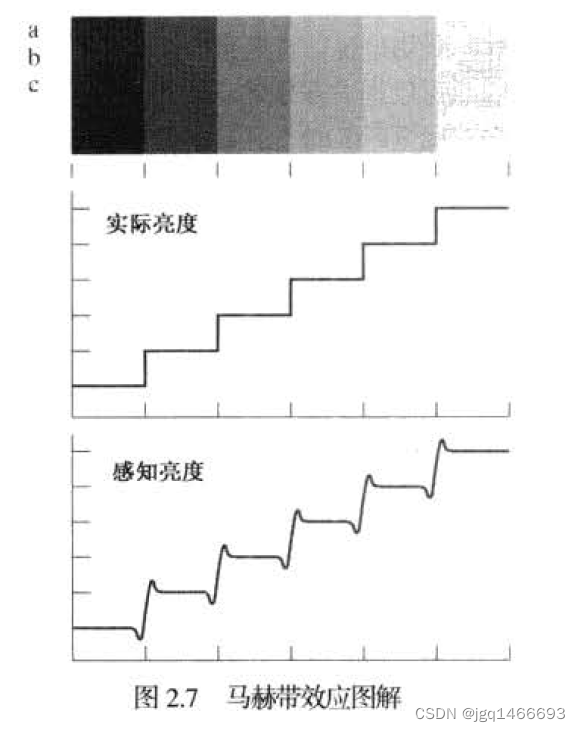
1、马赫带现象 2、同时对比现象
当然除了这两种现象外,我们日常生活中常见的例子还有错觉 。
二、图像的形成
2.1 图像的感知与获取
2.1.1感知
1、单个传感器获取图像 2、条状传感器获取图像 3、传感器阵列获取图像
2.1.2 图像的形成模型
第一章中我们将图像用二维函数f(x,y)表示,(x,y)为空间坐标,f 为灰度。当一幅图像由物理过程产生时,其亮度值正比于(电磁波)所辐射的能量,故我们可以得出:
函数可由两个分量进行表征,即反射分量与入射分量为:
;
;
2.2 取样与量化
获取图像的方法有很多种但目的都是一样的,都是通过利用获得的数据生成图像,将数据转化为数字形式后,再由此生成数字图像,这一过程种有取样和量化处理。
2.2.1取样与量化的概念
取样:空间坐标的数字化、离散化
量化:幅值的数字化、离散化
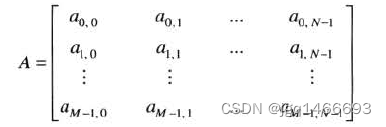
2.2.2 数字图像表示
可用传统矩阵表示数字图像及其像素,(x,y)代表空间坐标,f则表示幅值或灰度。每一个f(x,y)代表一个像素。
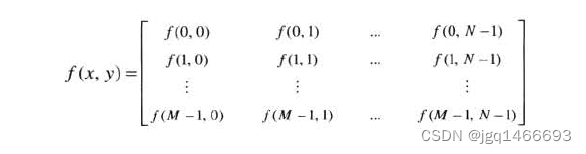
我们习惯性将原点列于左上角,正x轴向下,y轴右延,这种坐标系统为右手笛卡尔坐标系统。
2.2.3空间与灰度辨识度
空间辨识度是图像中可辩别的最小细节度量,且必须针对空间单位来规定才有意义。
灰度分辨率是指灰度级中可分辨的最小变化
为研究空间分辨率、灰度分辨率同时改变对图像影响,又引入了等偏爱曲线。
2.2.4 图像内插
是一种图像重获取方法包括有:最近相邻内插法、双线性内插、双三次内插
三、像素之间的关系
3.1 邻接性、连通性、区域和边界
在了解相关性质前我们需要了解邻域的概念,邻域即指指定像素的相邻像素集合,包括有4邻域,8邻域等。

橘色为对角邻域,蓝色为4邻域,两者相组合成为8邻域
3.1.1邻接性
引入V,令V是用于定义邻接性的灰度值集合比如在二值图像中,如果我们把具有1值的像素归诸于邻接像素,则V={1};在灰度图像中,概念是一样的,但V中一般包含更多的元素,它可能是0-255范围的任意一个子集。
4邻接。如果q在集合中,则具有V中数值的两个像 素p和q是4邻接的
8邻接。如果q在集合中,则具有V中数值的两个像 索p和q是8邻接的。
m邻接(混合邻接)。如果(i)q在N4 (p)中,或(ii)q在Nd(P) 中.且集合N4 (p)Nd(P) 中没有来自V中数值的像素,则 具有V中数值的两个像素p和q是m邻接的。(消除了采用8邻接时产生的二义性)
3.1.2 连通性
通路:从具有坐标(x,y)的像絮p到具有坐标(s,t)的像素q的一条通路。
连通:像素之间存在一个通路,则可以说两个像素p和q在S中是连通的。
3.2 距离度量
对于三个坐标像素点p,q,z有:
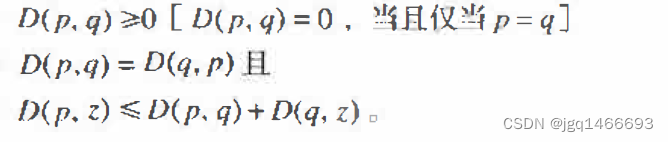
D为距离函数或度量
p与q间的欧几里得距离定义为:
城市街区距离:
![]()
棋盘距离:
![]()
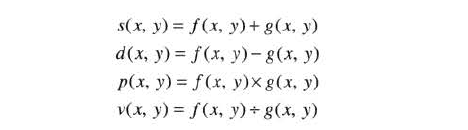
3.3 算术操作
3.1 加减乘除操作
3.2 集合和逻辑操作
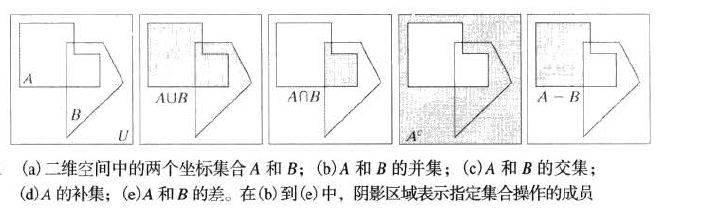
逻辑操作包括与操作、或操作、非操作其相关概念同数学上的类似。
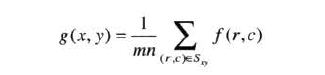
3.3空间操作
包括有单像素操作:
![]()
邻域操作:
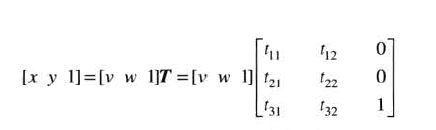
几何空间操作:















 1080
1080











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









