







一、PMSM的基本的构造
PMSM(permanent magnet synchronous motor)实际工作是一种交流电机,其定子运行是三项的相差 的交流电,而转子则是永磁体。但是这种电机最大的优势就是交流电能量由直流提供,这样就可以对电机进行精确的控制,而且解决了电刷带来的寿命问题。
下面对其工作原理进行简单的介绍,如图 1,定子的工作电流都为正弦波,而且其三项在任何时候相加都为零,所以PMSM中三项绕组实际上没有中线的,其在电机中示例绕线方法如图 2,所以实际上在PMSM中XYZ是连接在一个点的。

图 1 PMSM转子电流
图 2 PMSM基本的绕线方法
从绕线的图 2中不难看出,实际的电流方向产生的磁场是和转子磁场在同一个平面,这也就是PMSM控制的基本需要和基本方法。从图中也不难看出,实际在A相产生的磁场在开始是需要与转子磁极的D轴方向相反(可以相差一个确定的角度,软件实现),确切的说应该是必须知道转子的D轴的位置。这个问题实际在控制中是开始的定向问题,在这里简单的介绍一下方法:如果位置传感器是绝对码盘或者旋变,则可根据绝对位置处理,如果是增量码盘,则需要开始的一个UVW的大概位置估算。
除此之外,这里还需要明白几个原理性的问题,这里啰嗦一下:很多人从事这一块的研发在知道怎么处理整个系统的过程而实际上是对整个基础原理模糊的,这也就是很多国人做研发的通病,只知道怎么做,从来不知道为什么这么做以致永远只是模仿而不可能创新或者改进。言归正传,首先我们知道在控制过程中需要检测电流,然后进行clarke和park变换,从而出现了电流方向问题,人家这么说是为了方便,而实际上上这里的电流方向不是电流方向,而是电流产生的电磁场方向(这是因为电磁场的大小与产生它的电流方向成正比的)。然后研究一下电压的概念,绕组电压是比电流相位超前 的,而很多我们需要的结果是与电压成一定简单关系的,这是因为电压是场量,而电流不是。根本上没有电压这个东西,它只是间接反应电流的一种我们定义出来的表达方式,所以它的变化影响电流,而电流的变化会在场的方面反应在电压上。比如前面讨论的问题,在电机初始的时候,A相电流是零,这是因为在绕组上电流不能突变,而这个时候电压是最大,反应了实际我们是需要加在绕组上最大的我们需要的一个量(电流)。这里描述的有些晦涩,但是物理这个自然界基本规律实际就是这么反应的,希望读我文章的读者能自己仔细揣摩,反应一个自然界的问题(都上升到哲学问题了)。
二、PMSM的基本工作原理
如果你明白了我前面讨论的PMSM的基本问题,这里的东西实际相对就很简单,它的工作原理实际就是用直流电机的方法进行控制交流电机。
1) 首先我们看看这里涉及的第一个问题,定向问题。永磁同步电机的是通过转子定向工作的,也就是说我们控制的所有参考点是以转子为参考的。
所以我们开始控制之前就必须先知道我们参考点的位置,实际中大多工程是通过位置传感器来获得转子位置的,前面也已经提到除了旋变一般采用码盘作为位置传感器,而码盘又有绝对码盘和增量码盘(价格决定),而这两种的初始位置处理方法也不尽相同,但是都很简单。
2) 第二个问题就是它通过IGBT将直流电源转换为电机需要的三项交流电的,所以IGBT也就是这里决定电机控制好坏的一个关键器件,但是IGBT的开关时间实际是不一样的,所以会产生上下管子导通而短路的问题,实际工程中通过加死区来解决这个问题的,但是死区却给三项交流电的形成带来了不光滑的问题,这也是PMSM一个一直未得到很好解决的问题。
我以前做过一个十二矢量的控制方法,从理论上可以完全消除死区问题,而且会提高正弦波的精度。但是因为IGBT的反向二极管保护问题产生畸变,努力以后能改变IGBT的工作原理而实现这个突破性的问题,也是在工控行业的一个期待。
3) 下面讨论一下具体PMSM的控制方法,它是通过六矢量的空间矢量控制实现的(SVPWM),先看其控制方程如下:

所以可以计算得功率得大小为:

由于变换不是等功率变换,所以以上也只是系统一个有功功率的体现,并且只有第三相与转子的运动状态有关且直接参与机电能量转换的电磁功率。故电磁功率表示为:
由于我们的伺服系统大多采用最大力矩控制方法,所以令

所以可以通过控制 对整个系统进行控制,如下面框图:
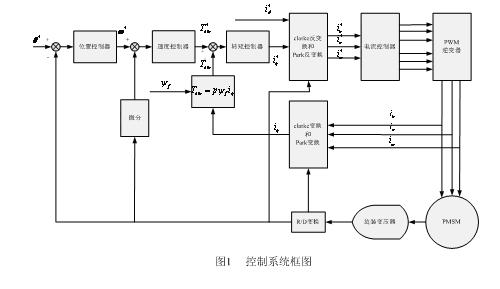
后面我会对具体这个框图的实现写相关的文章,并且会针对伺服系统中存在的很多问题进行讨论和解决。由于本人知识水平有限,不足之处希望大家指正和共同学习,我的邮箱是:gsujianwen@163.com。如果有问题可以和我联系。















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









