






基于MPC的智能车运动预测和控制算法
Motion predication; Kinematic model
可加入求解步骤进而得到自定义成本函数的可扩展MPC控制器;
模型状态空间方程线性化和离散化;
可与风险场 人工势场 决策 轨迹跟踪等算法集成;
需要用到车辆运动学模型的算法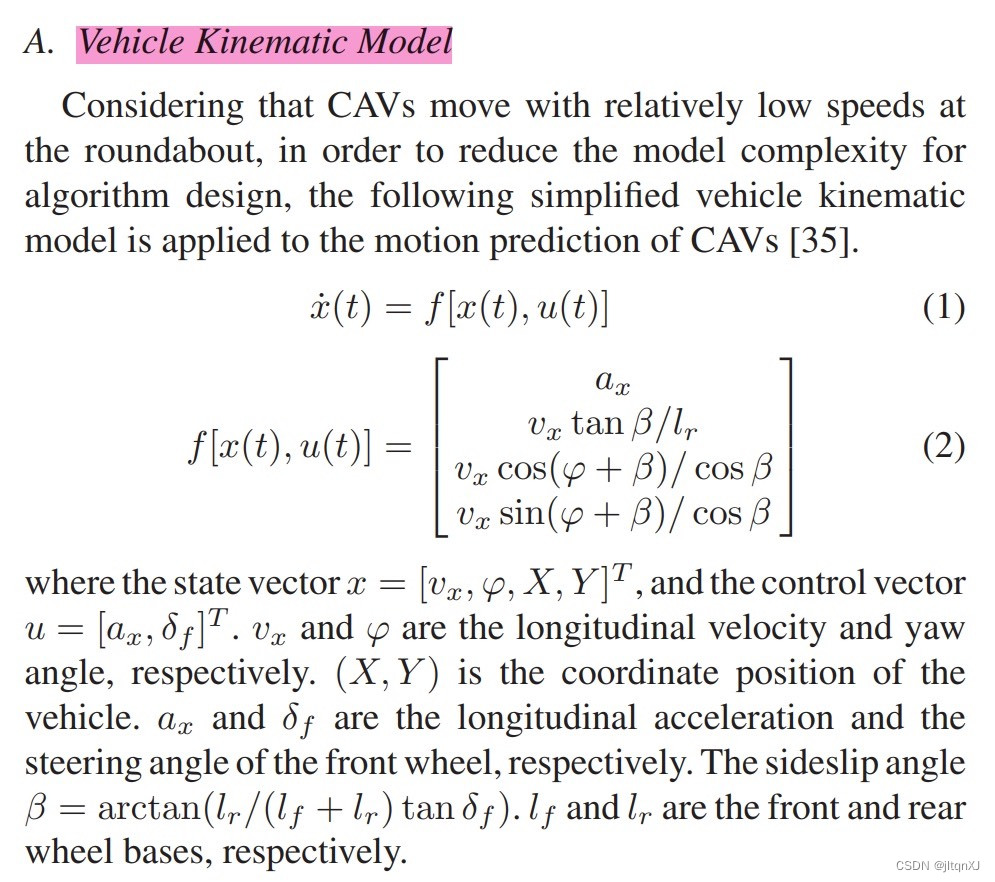
基于MPC的智能车运动预测和控制算法
智能汽车技术的发展为我们带来了更多的便利和舒适,其实现离不开运动预测和控制算法。基于模型预测控制(MPC)的智能车运动预测和控制算法,是一种能够对汽车即时运动状态进行推测和控制的技术。本文将重点介绍基于MPC的智能车运动预测和控制算法。
一、Motion predication
汽车在行驶中的运动状态是动态变化的,做出合适的预测是提高汽车运动控制精度的关键。Motion predication是一种可以对汽车即时运动状态进行推测的技术,基于MPC的智能车运动预测和控制算法中,使用Motion predication来预测汽车的运动状态,这可以提高汽车控制的精度和稳定性。
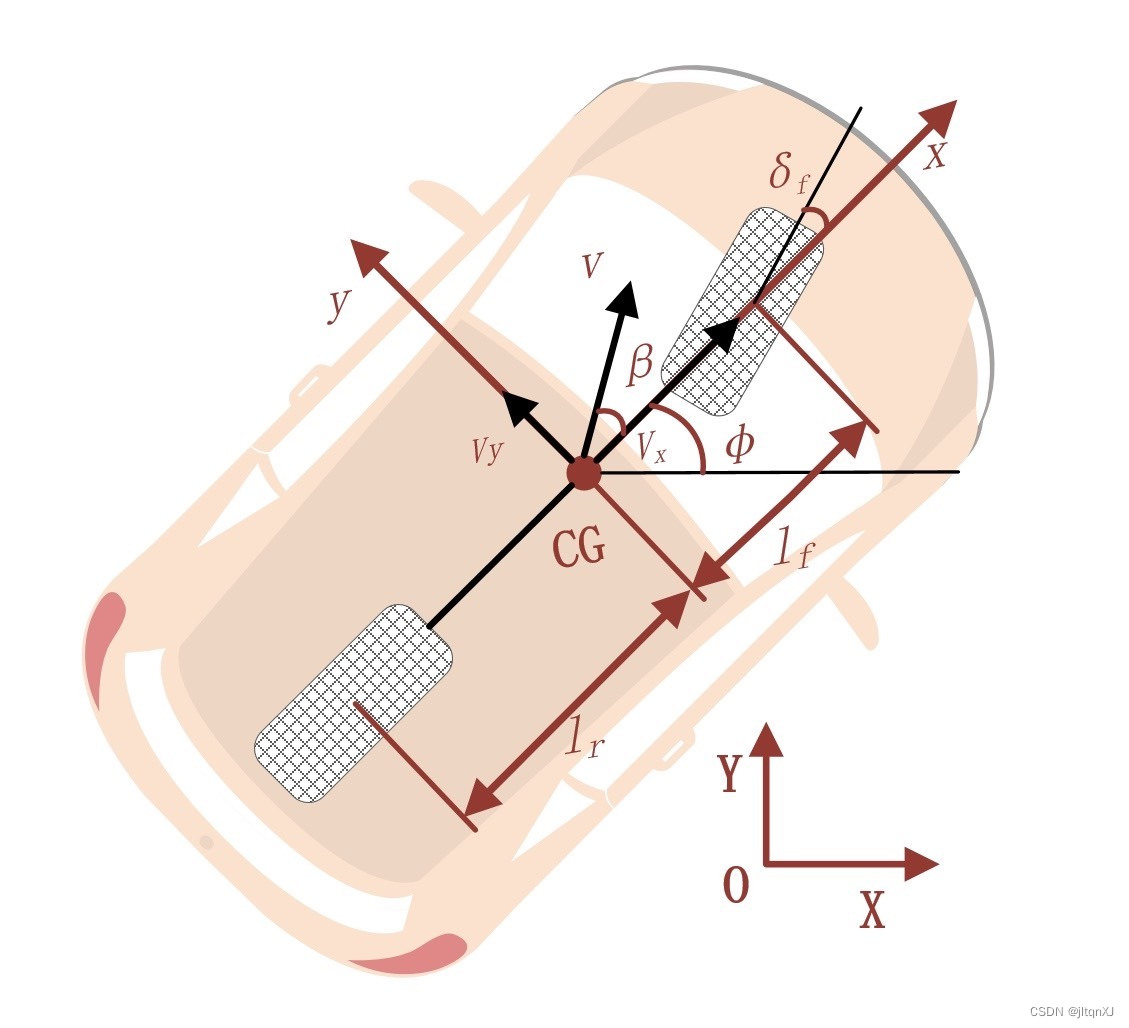
二、Kinematic model
基于MPC的智能车运动预测和控制算法还需要用到汽车的运动学模型,这个模型可以描述汽车的运动规律,对于算法的实现非常重要。在本文中,我们使用了Kinematic model来描述汽车的运动学模型,它包含了车辆的位姿、速度和加速度等运动参数,可以对车辆的运动状态进行全面的描述。
三、可扩展MPC控制器
基于MPC的智能车运动预测和控制算法还可以加入求解步骤进而得到自定义成本函数的可扩展MPC控制器。这个控制器可以通过自定义的成本函数来实现对车辆的控制,可以更好地满足不同场景下的控制需求。同时,这个控制器的可扩展性非常好,可以根据实际情况来进行扩展和改进。
四、模型状态空间方程线性化和离散化
在基于MPC的智能车运动预测和控制算法中,还需要对汽车的运动学模型进行状态空间方程线性化和离散化。这可以将连续的汽车运动模型转化为离散的状态空间模型,方便进行运动控制。
五、可与风险场 人工势场 决策 轨迹跟踪等算法集成
基于MPC的智能车运动预测和控制算法还可以与其他算法集成,比如风险场、人工势场、决策、轨迹跟踪等算法。这可以通过对算法进行整合和优化,实现更为精准的汽车运动控制。
综上所述,基于MPC的智能车运动预测和控制算法需要用到Motion predication、Kinematic model、可扩展MPC控制器、模型状态空间方程线性化和离散化、与其他算法集成等技术手段。在实际应用中,这些技术手段可以相互融合,进而实现对汽车运动状态的精准控制。通过这些技术手段的应用,基于MPC的智能车运动预测和控制算法已经成为智能汽车领域的重要研究方向。
相关代码,程序地址:http://lanzouw.top/702845671870.html















 308
308











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









