







”明月如霜,好风如水,清景无限 “
好了,开始新的专题了。带大家尽量的把自控这门课给串一遍。
- 最开始要有一个自控的大的框架。咱们的自控还是以研究线性问题为主,在线性里研究有三种方法:时域,复域,频域。而每种方法都分为分析和校正,分析是为了研究系统的好坏,状态,确定指标。而校正则是让系统变好(让不稳定的系统稳定,让稳定系统的性能指标更好)
好了,知道了这个大框架后,咋们先来讲讲时域,有些基本功需要提前说一下,方框图和信号流图的(想一下信号流图中的圈对应方框图的什么)转换和梅逊公式。然后是开环增益指的是开环传递函数G(S)在尾1标准型下的K。(尾1即化为括号相乘时,括号内常数项为1),与之相对的根轨迹增益是首1标准型。(根轨迹增益时域不提)除此之外是理解开环和闭环,主要区别是有无反馈,把开环传函记为G(S),闭环传函记为Φ(S)(传递函数的定义是系统输出拉氏变换与输入拉氏变换之比)。最后则是拉氏变换的掌握,自己好好的把拉式变换理解一下。
壹
- 时域分析(主要三个方面:稳定性,动态/暂态性能和稳态性能)
<ps.其实还有很多的准备知识,但是文远默认你是稍微听过自控课,有一些印象>
首先是一阶惯性系统。G(S)=1/(TS+1)
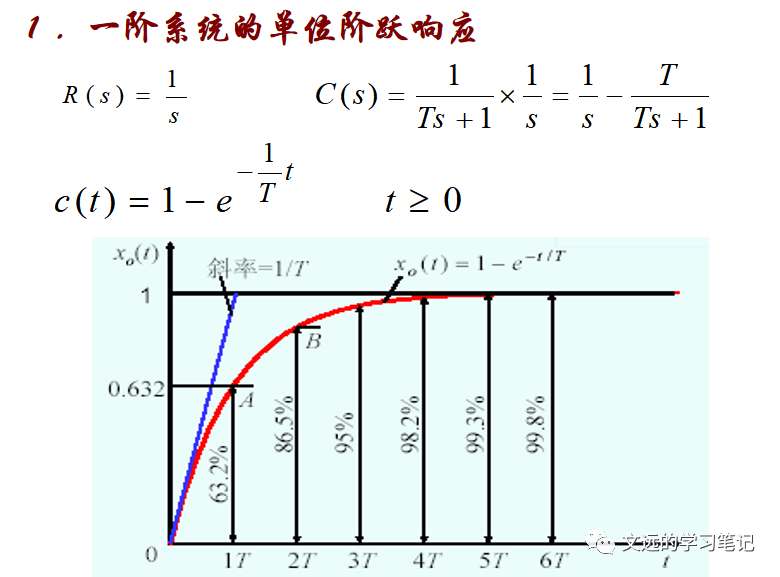
相当清晰,ts=3T,δ%=0,tp=∞。(可以自行回忆一下这三个公式和图像的定义)咋们可以从两个思路走,即有图的情况下,直接观察出峰值的时间,超调的大小,到达0.95*c(∞)的时间。而另一个思路则更客观准确,数学上,求导得到最大值时的tp,顺便对应求出c(tp),根据公式
δ%=(c(tp)-c(∞))/c(∞)
而最后的ts,则反解下列方程,再按照定义处理。
c(ts) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 7987
7987

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









