







STM32使用前的准备
对于要使用的每个STM32芯片,首先我们手上必备的两本手册(ST官网有pdf版):
- 参考手册(Reference manual)
- 数据手册(Datasheet)
其中参考手册包括各个功能模块的具体信息、原理、各种工作模式介绍、配置方法以及寄存器相关信息;数据手册包括芯片的基本参数、引脚数量与各自功能、电气特性、封装信息等内容。一般在选型与硬件设计阶段,参考数据手册多一些,而到了程序设计阶段,参考手册就是必须的了。
以下是STM32G4系列的参考手册的“自我介绍”:
This reference manual targets application developers. It provides complete information on how to use the STM32G4 Series microcontroller memory and peripherals.
本参考手册的目标是应用程序开发人员。 它提供了关于的完整信息如何使用STM32G4系列单片机的内存和外设。
SPI相关设置
我们以STM32G系列为例,直接翻到SPI章节,SPI结构示意图如下:
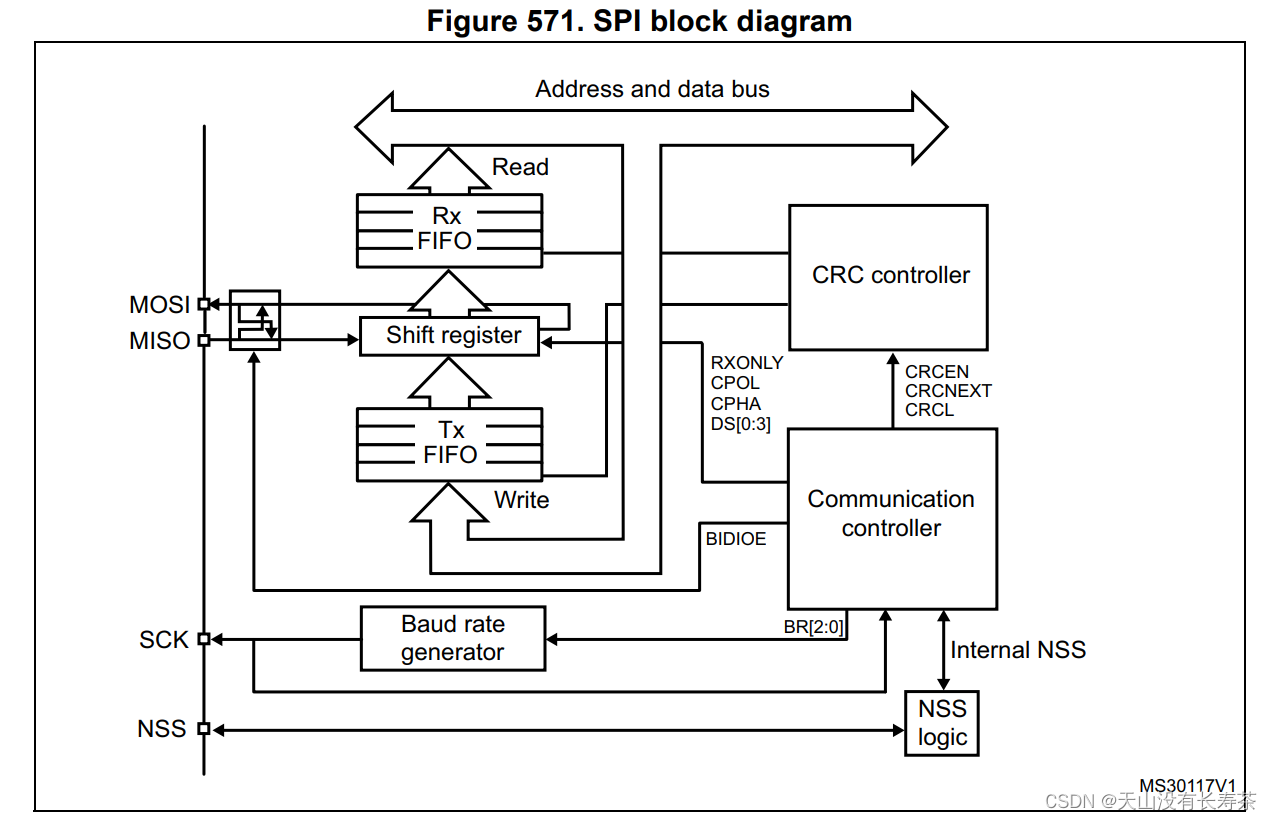
一共4个引脚可与外设连接:
- MISO(Master In / Slave Out data):该引脚在从模式下发送数据,在主模式下接收数据
- MOSI(Master Out / Slave In data):该引脚在主模式下发送数据,在从模式下接收数据
- SCK(Serial Clock):主设备往从设备传输的时钟信号
- NSS(Slave select):用于主设备选择从设备
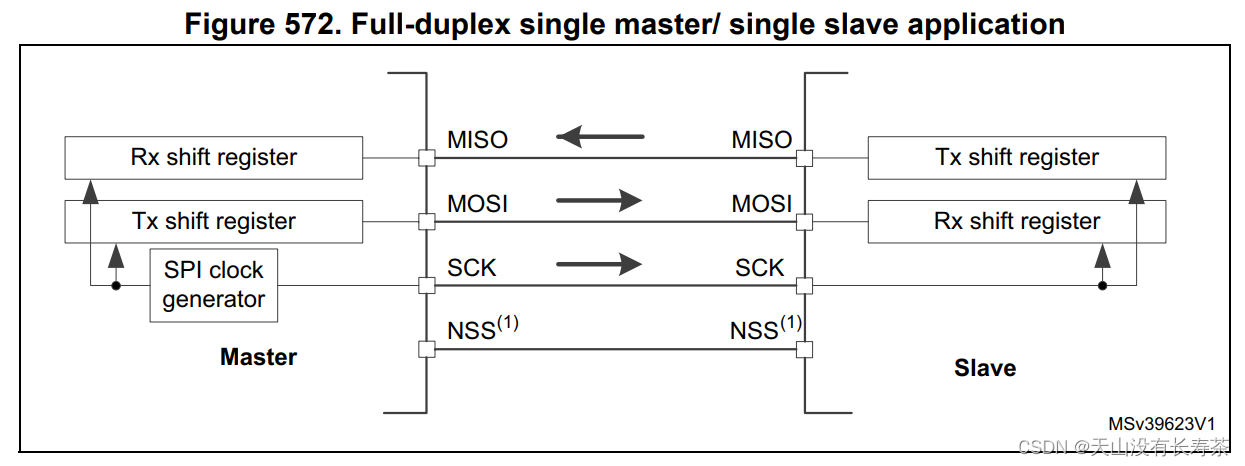
单个主设备与单个从设备全双工通信模式示意图如下:
我们采用STM32CubeMX可以方便的完成基础配置,实际只需要编写如下实际通讯需要的代码
基础通讯代码
Tx:发送缓冲区;Rx:接收缓冲区;DR:数据寄存器
状态指示标志:
- Tx buffer empty flag (TXE):发送缓冲区为空
- Rx buffer not empty (RXNE):接收缓冲区非空
- Busy flag (BSY):SPI数据正在传输中
基本工作原理:主机向从机发送一个值(指令),然后从机依据接收到的指令返回一个值
常见情况我们用STM32作为主机
- 等待TXE标志置1(Tx空),表明此时发送缓冲区Tx中无待发送的值
- 将数据写入SPIx_DR寄存器,对DR的写操作将把数据写入Tx末尾
- 等待BSY标志置0(即busy,置1表明Tx中的数据正在传输中)。期间数据通过MOSI发送给从机,从机返回的信息通过MISO回到主机接收缓冲区Rx
- 等待RXNE标志置1(Rx非空),表明此时Rx存在接收到的值
- 读取SPIx_DR寄存器,对DR的读操作将返回Rx中最早的值
// data_in:待发送的值
// data_out:接收到的值
static int spi_transmit_receive(uint16_t data_in, uint16_t *data_out){
int state = 0;
*data_out = 0;
uint32_t timeout_cnt;
static const uint32_t timeout_cnt_num = 10000;
// Wait until TXE flag is set to send data
timeout_cnt = 0;
while(!LL_SPI_IsActiveFlag_TXE(SPI1)){
timeout_cnt ++;
if(timeout_cnt > timeout_cnt_num){
state = -1;
break;
}
}
// Transmit data in 16 Bit mode
LL_SPI_TransmitData16(SPI1, data_in);
// Check BSY flag
timeout_cnt = 0;
while(LL_SPI_IsActiveFlag_BSY(SPI1)){
timeout_cnt ++;
if(timeout_cnt > timeout_cnt_num){
state = -1;
break;
}
}
// Check RXNE flag
timeout_cnt = 0;
while(!LL_SPI_IsActiveFlag_RXNE(SPI1)){
timeout_cnt ++;
if(timeout_cnt > timeout_cnt_num){
state = -1;
break;
}
}
// Read 16-Bits in the data register
*data_out = LL_SPI_ReceiveData16(SPI1);
return state;
}所涉及的LL库相关函数:
/** * @brief Write 16-Bits in the data register * @rmtoll DR DR LL_SPI_TransmitData16 * @param SPIx SPI Instance * @param TxData Value between Min_Data=0x00 and Max_Data=0xFFFF * @retval None */ __STATIC_INLINE void LL_SPI_TransmitData16(SPI_TypeDef *SPIx, uint16_t TxData) { #if defined (__GNUC__) __IO uint16_t *spidr = ((__IO uint16_t *)&SPIx->DR); *spidr = TxData; #else SPIx->DR = TxData; #endif /* __GNUC__ */ } /** * @brief Read 16-Bits in the data register * @rmtoll DR DR LL_SPI_ReceiveData16 * @param SPIx SPI Instance * @retval RxData Value between Min_Data=0x00 and Max_Data=0xFFFF */ __STATIC_INLINE uint16_t LL_SPI_ReceiveData16(SPI_TypeDef *SPIx) { return (uint16_t)(READ_REG(SPIx->DR)); } /** * @brief Check if Tx buffer is empty * @rmtoll SR TXE LL_SPI_IsActiveFlag_TXE * @param SPIx SPI Instance * @retval State of bit (1 or 0). */ __STATIC_INLINE uint32_t LL_SPI_IsActiveFlag_TXE(SPI_TypeDef *SPIx) { return ((READ_BIT(SPIx->SR, SPI_SR_TXE) == (SPI_SR_TXE)) ? 1UL : 0UL); } /** * @brief Get busy flag * @note The BSY flag is cleared under any one of the following conditions: * -When the SPI is correctly disabled * -When a fault is detected in Master mode (MODF bit set to 1) * -In Master mode, when it finishes a data transmission and no new data is ready to be * sent * -In Slave mode, when the BSY flag is set to '0' for at least one SPI clock cycle between * each data transfer. * @rmtoll SR BSY LL_SPI_IsActiveFlag_BSY * @param SPIx SPI Instance * @retval State of bit (1 or 0). */ __STATIC_INLINE uint32_t LL_SPI_IsActiveFlag_BSY(SPI_TypeDef *SPIx) { return ((READ_BIT(SPIx->SR, SPI_SR_BSY) == (SPI_SR_BSY)) ? 1UL : 0UL); } /** * @brief Check if Rx buffer is not empty * @rmtoll SR RXNE LL_SPI_IsActiveFlag_RXNE * @param SPIx SPI Instance * @retval State of bit (1 or 0). */ __STATIC_INLINE uint32_t LL_SPI_IsActiveFlag_RXNE(SPI_TypeDef *SPIx) { return ((READ_BIT(SPIx->SR, SPI_SR_RXNE) == (SPI_SR_RXNE)) ? 1UL : 0UL); }
实际使用spi_transmit_receive函数时,一般需要在函数前后设置以下片选NSS输出,通讯前选中当前从机,通讯后再关闭,防止多主机或者多从机模式时的冲突。
// NSS片选引脚置0,开启当前主从关系
LL_GPIO_ResetOutputPin(GPIOx, LL_GPIO_PIN_x);
spi_transmit_receive(controlword, &recbuff);
// NSS置1,关闭当前主从关系
LL_GPIO_SetOutputPin(GPIOx, LL_GPIO_PIN_x);
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









