







在开环系统下,其某个量可变(一般是增益),其它量固定不变,描绘出闭环极点的轨迹,这个轨迹就叫根轨迹。
一、负反馈根轨迹
clear;close all;clc;
num=[1,5];
den=conv([1,1],conv([1,3],[1,12]));
sys = tf(num,den);
rlocus(sys)
sgrid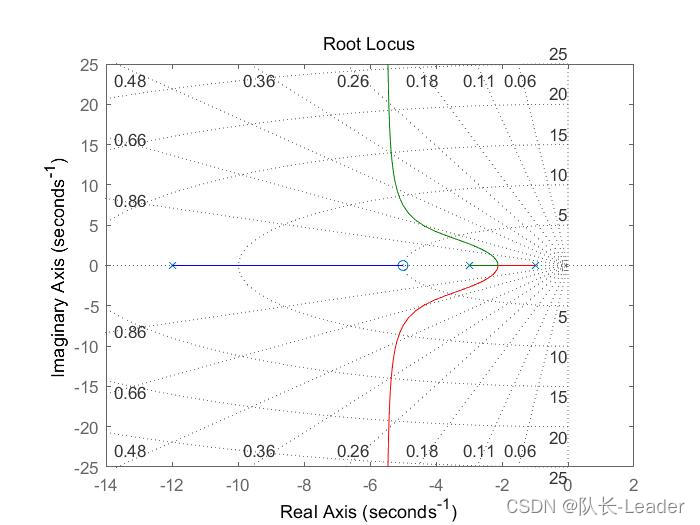
二、正反馈根轨迹
clear;close all;clc;
num=[1,2];
den=conv([0,1,3],[1,2,2]);
sys=tf(num,den);
rlocus(-sys)
axis([-15,5,-10,10])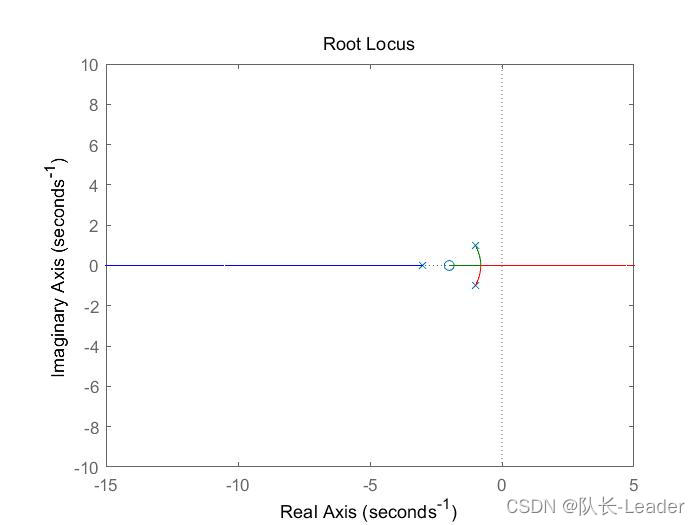
三、参数根轨迹
clear;close all;clc;
k=5;
den=conv(conv([1 1],[1 3]),[1 12]);
clpoles=[];
param=[];
for alpha=2:10
num=[0,0,k,k*alpha];
clpoly=num+den;
clp=roots(clpoly); %计算闭环极点
clpoles=[clpoles;clp'];
param=[param;alpha];
end
disp([param,clpoles])
plot(clpoles,'*')
axis equal;
axis([-4,0,-2,2]);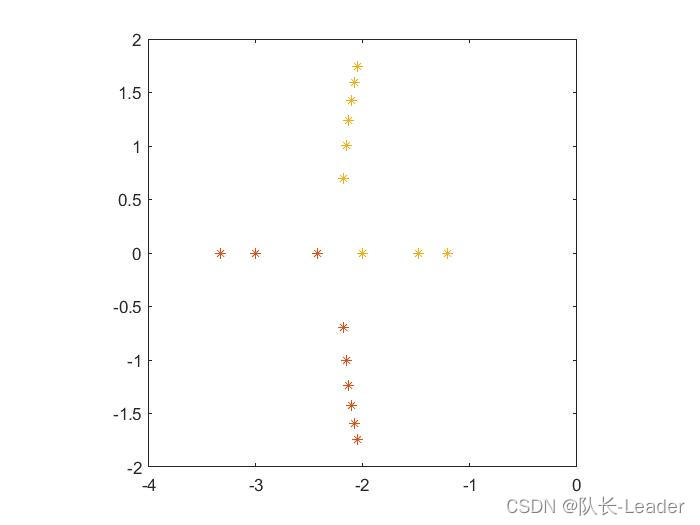
四、迟滞根轨迹
clear;close all;clc;
num=[0,1];
den=conv(conv([1 0],[1 1]),[0.5 1]);
sys1=tf(num,den);
[np,dp]=pade(1,3); %对时滞环节进行PADE近似
sys=sys1*tf(np,dp);
rlocus(sys)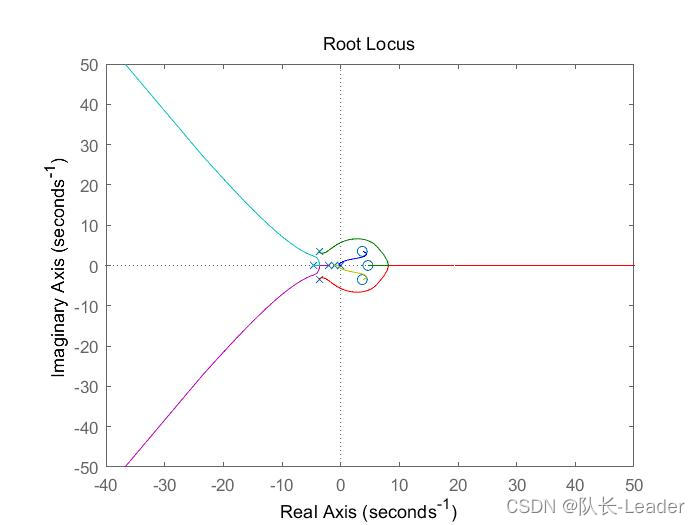

















 543
543

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









