






 本文介绍了使用卡尔曼滤波算法融合惯性导航和GPS数据,优化轨迹生成并导入Excel文件进行数据处理。实验证明了此方法提高了定位精度和稳定性,展望了在航空、导航等领域的发展前景。
本文介绍了使用卡尔曼滤波算法融合惯性导航和GPS数据,优化轨迹生成并导入Excel文件进行数据处理。实验证明了此方法提高了定位精度和稳定性,展望了在航空、导航等领域的发展前景。
基于卡尔曼滤波算法,实现惯导和GPS信息输出的轨迹优化,导入excel文件
ID:9349687803456498
筑波稳重的椰子
标题:基于卡尔曼滤波算法的惯导与GPS信息融合优化及其在轨迹生成中的应用
摘要:本文基于卡尔曼滤波算法,将惯性导航(IMU)与全球定位系统(GPS)的信息进行融合,实现对轨迹数据的优化处理。同时,通过导入Excel文件,将原始数据进行处理与分析,为进一步的应用提供了可靠的输入。本文首先介绍了卡尔曼滤波算法的基本原理与优势,接着详细探讨了惯导与GPS信息的融合方法及其在轨迹生成中的应用。最后,通过实验验证了卡尔曼滤波算法在轨迹优化中的有效性,并展望了未来的发展方向。
-
引言
惯性导航与全球定位系统作为导航领域中常用的定位手段,各自具有一定的优势和缺陷。为了克服单一定位系统的局限性,将二者信息进行融合是一种有效的方法。本节将介绍卡尔曼滤波算法的基本原理及其在轨迹优化中的应用背景。 -
卡尔曼滤波算法的基本原理
卡尔曼滤波算法是一种递归估计算法,适用于线性系统和线性观测模型。通过对系统状态及观测数据的迭代更新,可以实现对系统状态的估计。本节将介绍卡尔曼滤波算法的基本原理,包括状态预测、状态更新和协方差更新等步骤。 -
惯导与GPS信息的融合方法
为了将惯导与GPS信息进行融合,需要解决二者之间的数据不一致性以及误差叠加的问题。本节将介绍基于卡尔曼滤波算法的惯导与GPS信息融合方法,包括状态量定义、观测量定义和系统模型的建立等步骤。 -
轨迹生成及优化
在融合惯导与GPS信息的基础上,可以利用优化算法生成更加精确的轨迹数据。本节将介绍轨迹生成的方法,并详细讨论了轨迹优化过程中的关键问题,如航迹平滑、轨迹纠偏等。 -
导入Excel文件实现数据处理与分析
为了方便数据的处理与分析,本文引入Excel文件作为数据的输入。本节将介绍如何导入Excel文件,并对原始数据进行处理与分析,为接下来的轨迹优化提供可靠的输入。 -
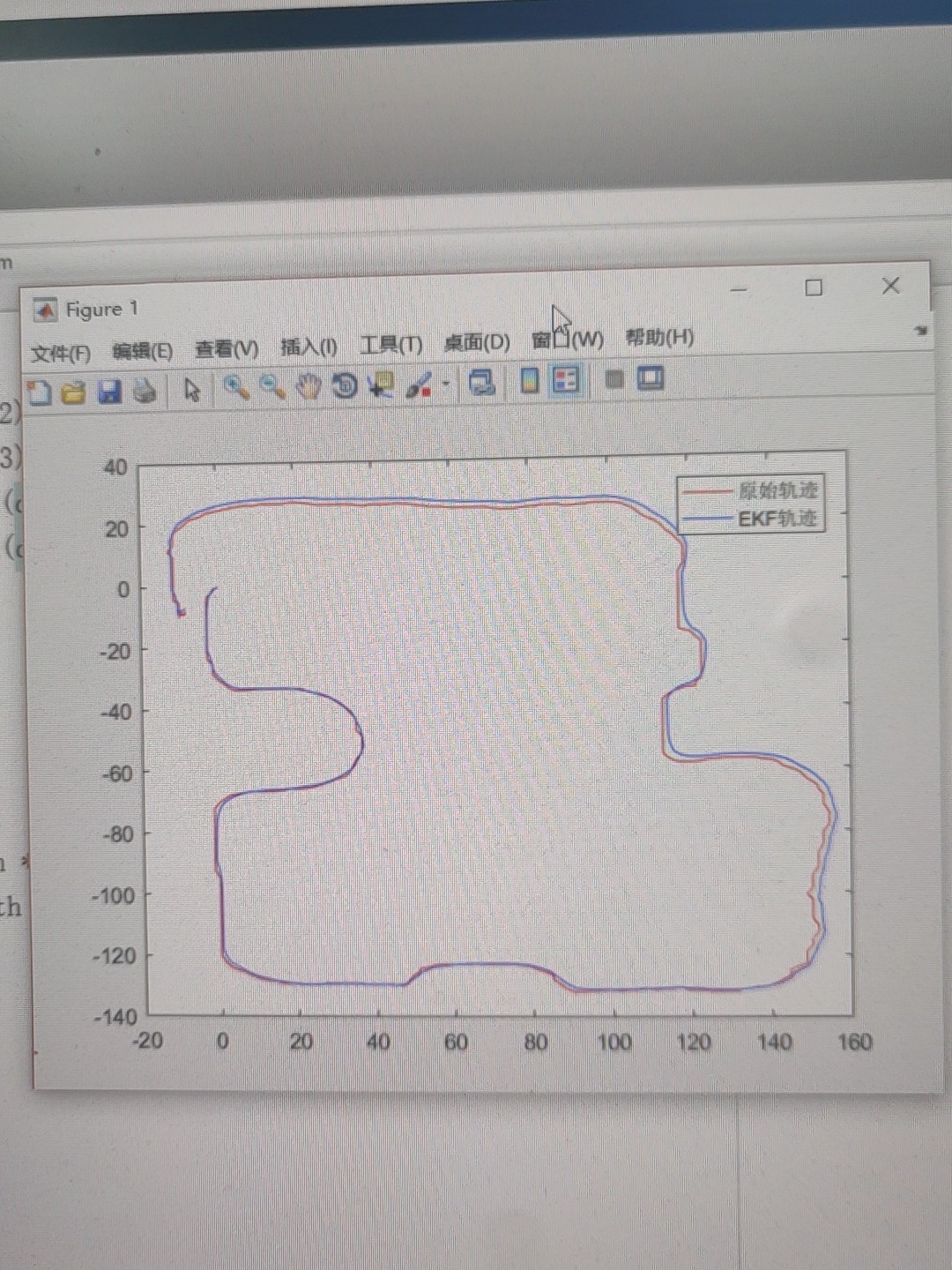
实验验证与结果分析
本节通过实验验证了卡尔曼滤波算法在轨迹优化中的有效性,并对实验结果进行了详细的分析。实验结果表明,融合惯导与GPS信息的轨迹优化方法能够显著提高定位精度与航迹稳定性。 -
发展趋势与应用前景展望
本节将对卡尔曼滤波算法在轨迹优化领域的发展趋势进行展望,并讨论了其在航空、导航和智能交通等领域的广泛应用前景。
结论:本文基于卡尔曼滤波算法,实现了惯导与GPS信息的优化处理,并通过导入Excel文件的方式提供了可靠的输入数据。实验结果表明,融合惯导与GPS信息的轨迹优化方法能够显著提高定位精度与航迹稳定性。未来,该方法在航空、导航和智能交通等领域将得到广泛应用。
关键词:卡尔曼滤波算法;惯导;GPS;轨迹优化;Excel文件导入
【相关代码 程序地址】: http://nodep.cn/687803456498.html















 7472
7472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









