






分布式驱动汽车稳定性控制。
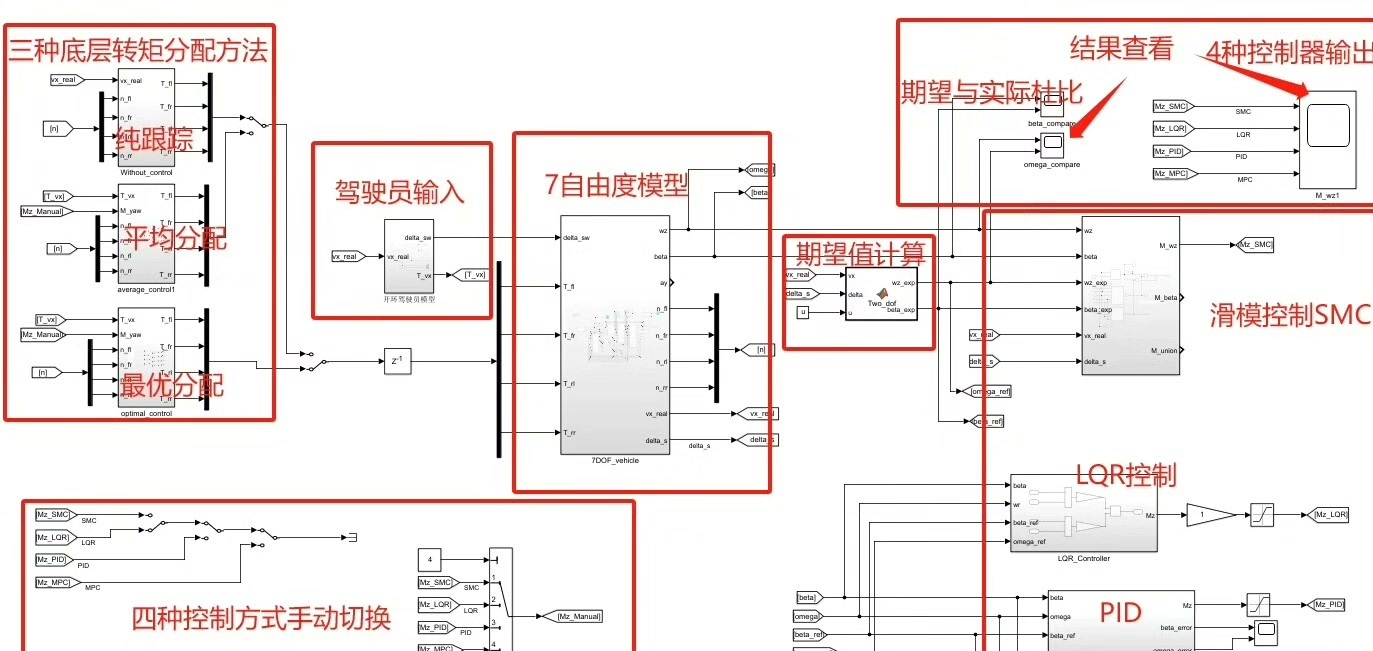
采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。
采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。
可灵活对四种控制器对比和选择。
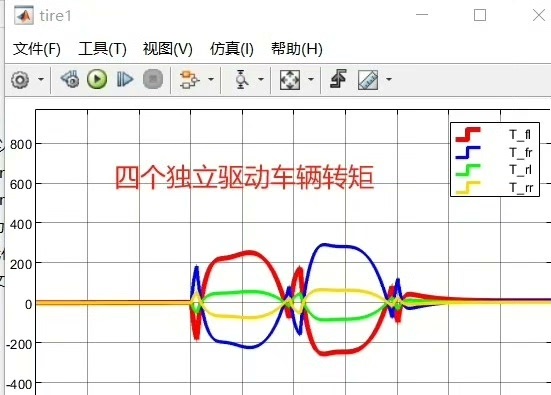
另外下层基于轮胎滑移率最优分配。
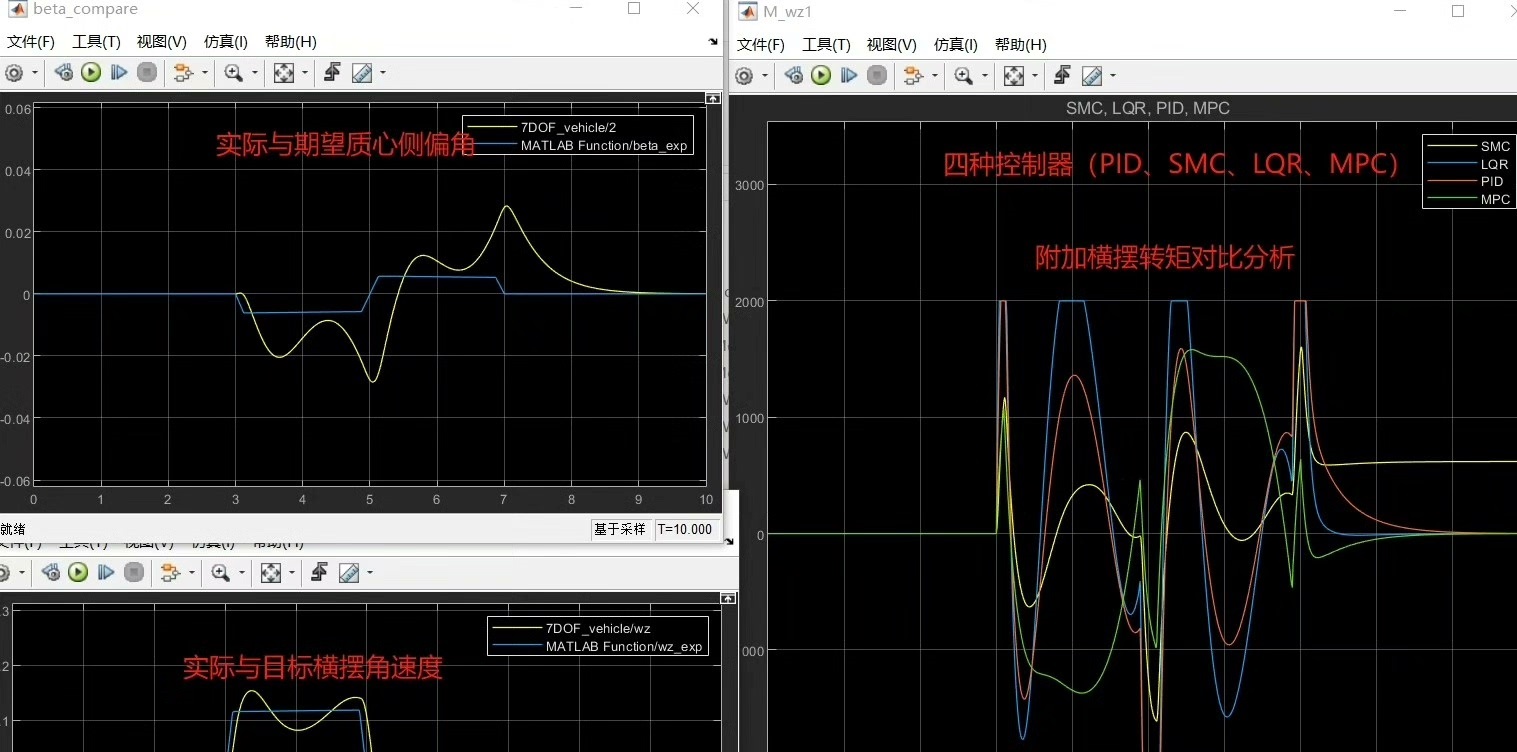
四种控制均可跟踪横摆角速度和质心侧偏角期望值。
车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
包运行,运行不通过不收费。
默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
。
ID:86132766107909357
小小科技

标题:基于Simulink的分布式驱动汽车稳定性控制系统研究
摘要:本文基于Simulink模型,通过构建包含控制策略和车辆动力学模型的系统,实现了分布式驱动汽车的稳定性控制。通过分层式控制策略,包括模型预测控制(MPC)、滑模控制(SMC)、PID控制和LQR控制,实现对横摆力矩的控制。同时,通过最优轮胎滑移率分配,进一步提升了控制效果。本文提供了完整的仿真模型、控制器说明、参考文献和整车建模说明文档,并可支持MATLAB不同版本和与Carsim联合仿真。通过本研究,我们为分布式驱动汽车稳定性控制提供了一种有效的解决方案。
关键词:分布式驱动汽车稳定性控制;Simulink模型;控制策略;车辆动力学模型;模型预测控制;滑模控制;PID控制;LQR控制;轮胎滑移率;仿真模型;整车建模
-
引言
随着汽车技术的不断进步,分布式驱动系统在汽车行业中得到了广泛应用。分布式驱动系统的稳定性控制对于提高汽车操控性和安全性至关重要。本文通过Simulink模型搭建了一个分布式驱动汽车稳定性控制系统,并探讨了不同控制策略的应用效果。 -
系统搭建
2.1 控制策略
本文采用分层式控制策略,包括模型预测控制(MPC)、滑模控制(SMC)、PID控制和LQR控制。这四种控制器均可实现对横摆力矩的控制,并跟踪横摆角速度和质心侧偏角的期望值。
2.2 车辆动力学模型
本文采用七自由度整车模型作为被控对象,并输出实际质心侧偏角和横摆角速度。同时,二自由度模型输出理想质心侧偏角和横摆角速度。通过比较实际与理想数值,评估控制器的控制效果。
- 分层式控制策略分析
3.1 模型预测控制(MPC)
MPC通过预测未来状态,寻求最优控制策略。本文分析了MPC在分布式驱动汽车稳定性控制中的应用效果,并通过仿真结果进行验证。
3.2 滑模控制(SMC)
SMC基于滑模面的滑动模式控制理论,具有快速响应、鲁棒性强等特点。本文对SMC在分布式驱动汽车稳定性控制中的优缺点进行了分析,并通过仿真结果进行验证。
3.3 PID控制
PID控制是经典的线性控制方法,具有简单、易理解、易实现等特点。本文探讨了PID控制在分布式驱动汽车稳定性控制中的应用效果,并对比了其他控制策略。
3.4 LQR控制
LQR控制是基于状态反馈的线性二次调节器,可以实现系统的最优控制。本文对LQR控制在分布式驱动汽车稳定性控制中的应用效果进行了分析,并通过仿真结果进行验证。
-
轮胎滑移率最优分配
轮胎滑移率最优分配是提高汽车稳定性的重要控制手段。本文介绍了基于轮胎滑移率最优分配的方法,并对比了不同控制策略的效果。 -
仿真结果与分析
通过对控制器的仿真结果进行分析,本文对比了不同控制策略的效果,并评估了系统的稳定性和操控性。 -
结论
本文通过Simulink模型搭建了一个分布式驱动汽车稳定性控制系统,并研究了不同控制策略的应用效果。通过轮胎滑移率最优分配和控制器的组合使用,可以有效提升汽车的操控性和安全性。本研究为分布式驱动汽车稳定性控制提供了一种有效的解决方案。 -
参考文献
本文所涉及的参考文献和整车建模说明文档详见附录。
注意:本文仅为一份示例,实际撰写时请结合具体情况和文献资料进行更详细的论述。
以上相关代码,程序地址:http://fansik.cn/766107909357.html
















 301
301











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









