






分布式驱动汽车稳定性控制。
采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。
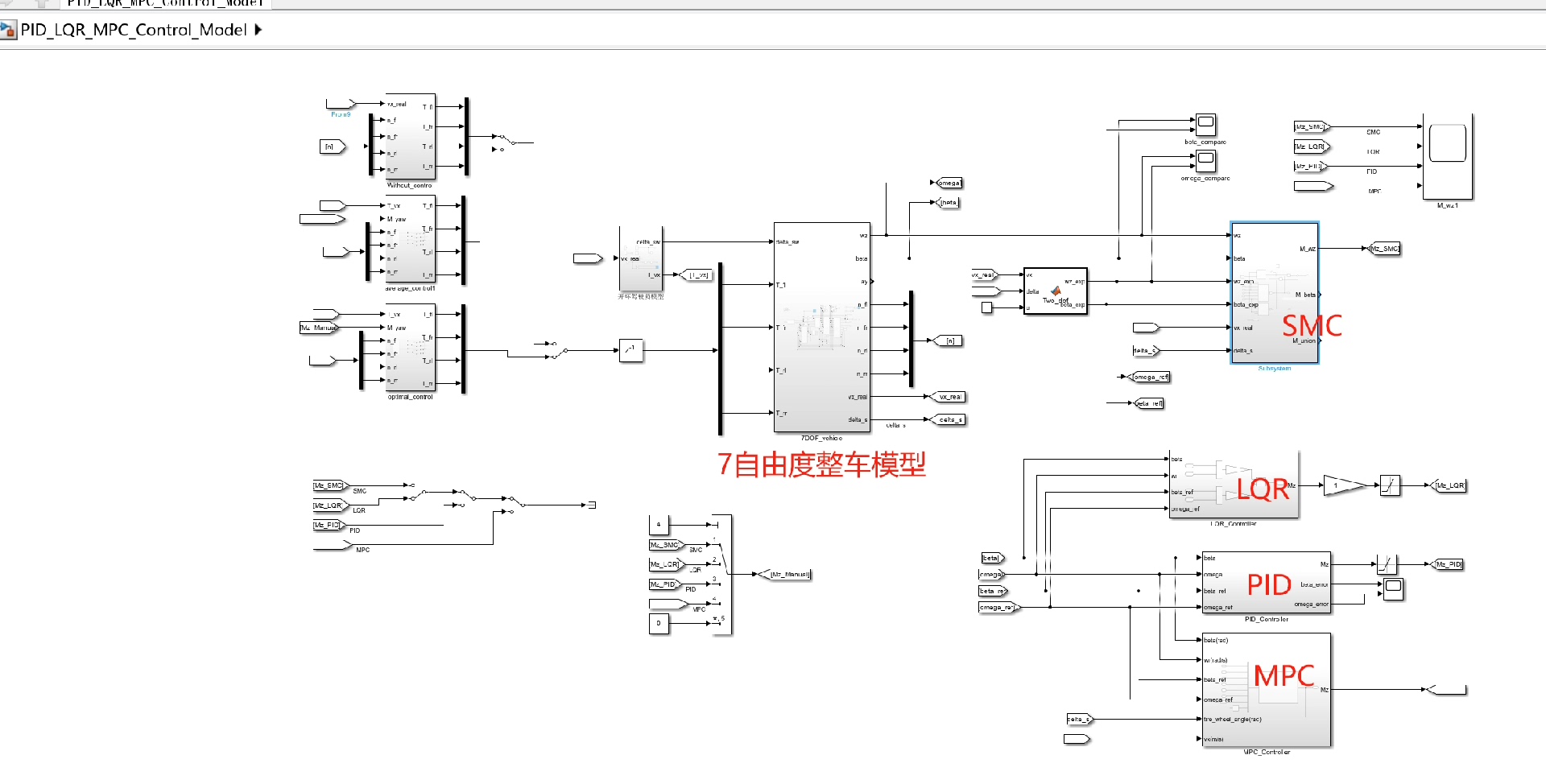
采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。
可灵活对四种控制器对比和选择。
另外下层基于轮胎滑移率最优分配。
四种控制均可跟踪横摆角速度和质心侧偏角期望值。
车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
模型用来学习建模和分布式控制驱动思路。
YID:5810779509481701
tbNick_tyzxw

分布式驱动汽车稳定性控制是现代汽车技术领域的重要研究方向,它旨在提高汽车在各种路况下的行驶稳定性和操控性能。为了实现这一目标,研究者们采用了纯Simulink模型搭建的方法,将控制策略和车辆动力学模型相结合。
分布式驱动汽车稳定性控制系统采用了分层式直接横摆力矩控制,上层包括模型预测MPC、滑模控制SMC、PID控制和LQR控制等多种控制器。这些控制器通过精确计算和调整车辆的横摆力矩,实现对车辆横向姿态的控制。通过对比和选择这四种控制器,可以灵活地调整系统的性能和稳定性。
另外,分布式驱动汽车稳定性控制系统的下层基于轮胎滑移率最优分配原则。通过精确计算和调整轮胎的滑移率,实现对车辆的横向力分配,达到最优的操控效果。
这四种控制器均可跟踪横摆角速度和质心侧偏角的期望值,从而实现对车辆横向姿态的精确控制。为了实现这一目标,车辆被控对象采用了七自由度整车模型和二自由度模型。七自由度整车模型可以输出实际质心侧偏角和横摆角速度,而二自由度模型可以输出理想质心侧偏角和横摆角速度,从而为控制系统提供准确的参考值。
为了方便研究者们的使用和学习,该分布式驱动汽车稳定性控制系统提供了初始化文件、Simulink模型、控制器说明和七自由度整车建模说明文档等相关文档。同时,还提供了两个版本的Simulink模型,其中默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。通过这些文档和模型,研究者们可以深入学习和探索分布式控制驱动的思路和方法。
综上所述,分布式驱动汽车稳定性控制是一个复杂而关键的技术领域。通过采用纯Simulink模型搭建,分层式直接横摆力矩控制和轮胎滑移率最优分配等技术手段,可以实现对车辆横向姿态的精确控制。该系统具有灵活性和可扩展性,可以根据实际需求选择不同的控制器和模型进行研究和应用。通过深入学习和研究这一领域,可以为汽车行业的发展和进步做出重要贡献。
以上相关代码,程序地址:http://wekup.cn/779509481701.html















 5845
5845

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









