






分布式驱动汽车稳定性控制。
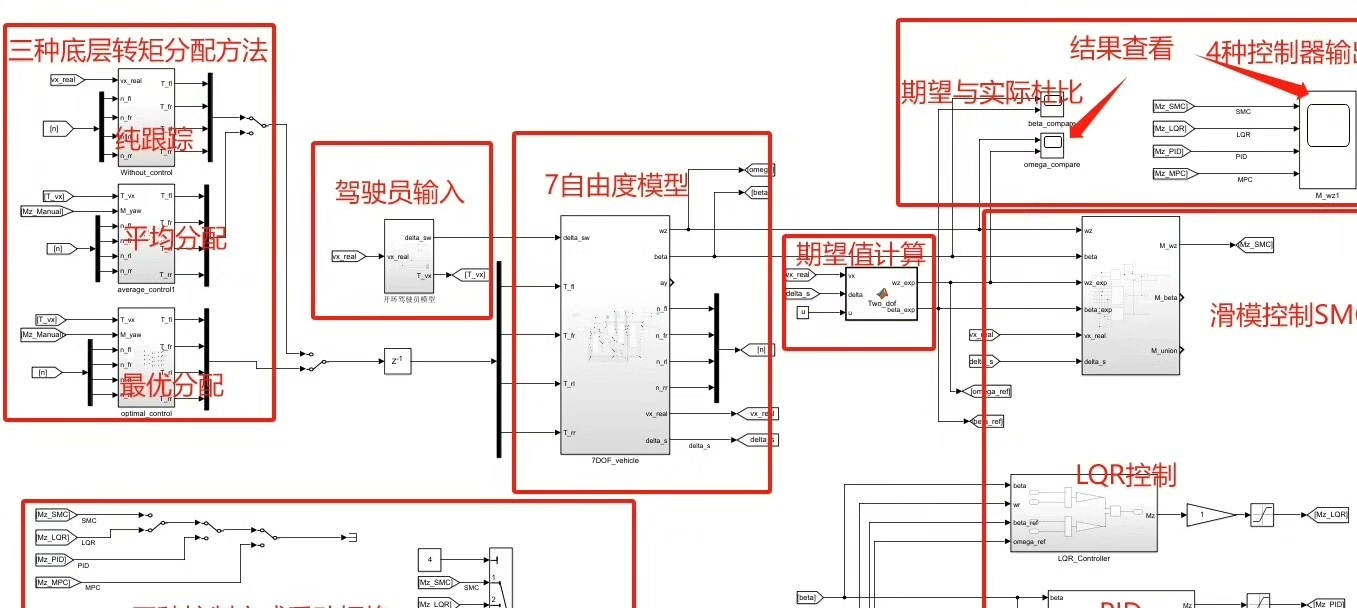
采用纯Simulink模型搭建,包括控制策略和车辆动力学模型。
采用分层式直接横摆力矩控制,上层包括模型预测MPC,滑模控制SMC,PID控制,LQR控制。
可灵活对四种控制器对比和选择。
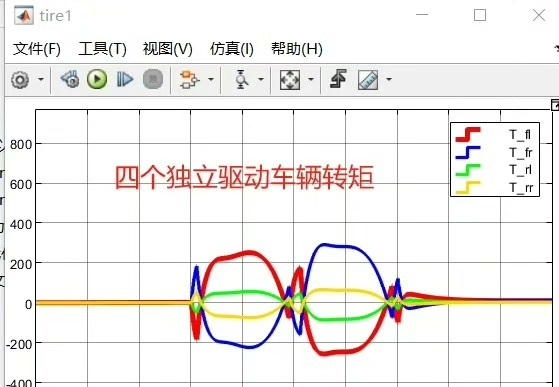
另外下层基于轮胎滑移率最优分配。
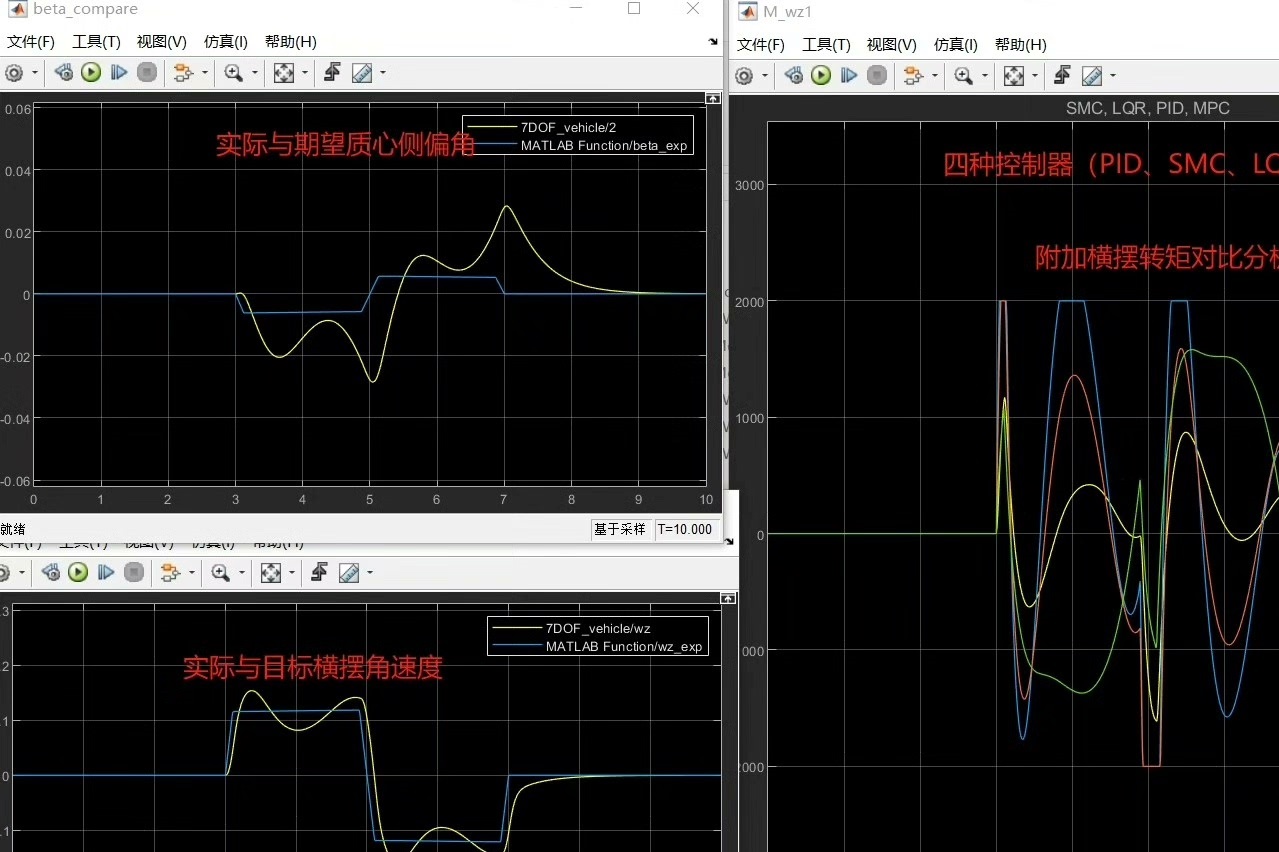
四种控制均可跟踪横摆角速度和质心侧偏角期望值。
车辆被控对象采用七自由度整车模型输出实际质心侧偏角和横摆角速度,二自由度模型输出理想质心侧偏角和横摆角速度。
具有初始化文件,Simulink模型,控制器说明,有参考文献和七自由度整车建模说明文档。
默认采用MATLAB2021a版本,另外提供了比较旧的2016a版本模型。
ID:72133766107929887
魔灵星自主的芥兰

标题:分布式驱动汽车稳定性控制技术分析
摘要:本文基于纯Simulink模型搭建,探讨了分布式驱动汽车稳定性控制技术。通过分层式直接横摆力矩控制方法,上层结合模型预测MPC、滑模控制SMC、PID控制和LQR控制,实现了对汽车在横向运动过程中稳定性的精确控制。同时,本文还介绍了基于轮胎滑移率最优分配的下层控制策略。通过对四种控制器的比较与选择,我们可以灵活应用于不同的驾驶场景。最后,本文提供了七自由度整车模型输出实际质心侧偏角和横摆角速度,以及二自由度模型输出理想质心侧偏角和横摆角速度。同时,在文章中还提供了初始化文件、Simulink模型、控制器说明、参考文献和七自由度整车建模说明文档,以便读者深入了解该技术。
-
引言
在汽车行业的发展中,对于汽车的操控性和稳定性要求越来越高。特别是在高速驾驶和特殊路况下,分布式驱动汽车稳定性控制技术显得尤为重要。本文将结合纯Simulink模型,深入分析该技术的原理与应用。 -
控制策略与车辆动力学模型
2.1 分层式直接横摆力矩控制
分布式驱动汽车稳定性控制采用分层式直接横摆力矩控制方法,上层主要包括模型预测MPC、滑模控制SMC、PID控制和LQR控制。本节将详细介绍这四种控制策略的原理和优劣势,并探讨其在实际应用中的适用性。
2.2 基于轮胎滑移率最优分配的下层控制策略
在分布式驱动汽车稳定性控制技术中,下层控制策略基于轮胎滑移率最优分配。本节将详细介绍该策略的实现原理和在驾驶过程中的作用。
-
四种控制器对比与选择
本节将对模型预测MPC、滑模控制SMC、PID控制和LQR控制进行对比分析。通过比较这四种控制器在不同驾驶情境下的表现,可以选择最合适的控制策略。 -
车辆被控对象
4.1 七自由度整车模型
本文提供了七自由度整车模型,并输出实际质心侧偏角和横摆角速度。本节将对七自由度整车模型进行介绍,并详细说明其在分布式驱动汽车稳定性控制中的应用。
4.2 二自由度模型
此外,本文还提供了二自由度模型,输出理想质心侧偏角和横摆角速度。本节将对二自由度模型进行详细说明,并讨论其与七自由度整车模型的差异与联系。
- 附录
本节提供了初始化文件、Simulink模型、控制器说明、参考文献和七自由度整车建模说明文档。读者可以在此基础上深入学习分布式驱动汽车稳定性控制技术。
结论:分布式驱动汽车稳定性控制技术通过纯Simulink模型搭建,采用分层式直接横摆力矩控制和基于轮胎滑移率最优分配的下层控制策略,实现了对汽车稳定性的精确控制。通过四种控制器的比较与选择,我们可以灵活应用于不同的驾驶场景。同时,本文还提供了七自由度整车模型和二自由度模型,以及相关的附录文件,方便读者深入学习和研究该技术。
关键词:分布式驱动、汽车稳定性控制、Simulink模型、分层式控制、轮胎滑移率最优分配。
以上相关代码,程序地址:http://fansik.cn/766107929887.html
















 602
602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









