






Optucal Flow
X (t)是一个移动的三维点,场景点的速度:V = dX/dt
x(t)=(x(t),y(t))是X在图像中的投影
速度在图像中的v:由分量vx = dx/dt和vy = dy/dt给出这些分量被称为图像的运动场
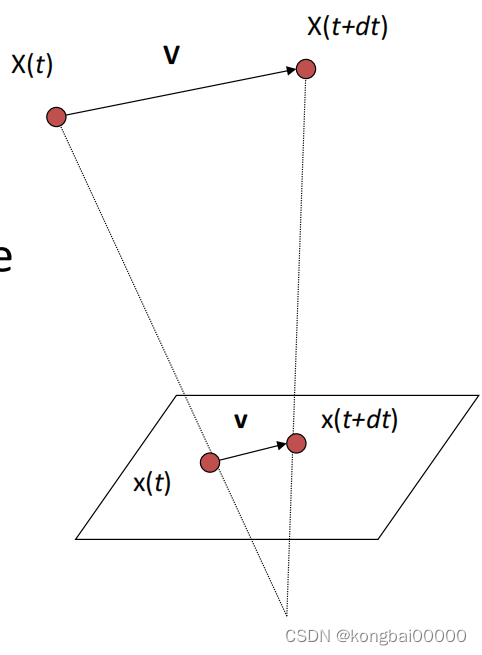

运动矢量的长度与深度Z成反比, 当Vz是非零时每个运动向量都指向(或远离)平移方向的消失点。
Optical flow
光流是图像中亮度图案的表观运动,理想情况下,光流应该与运动场相同。(但是如果没有实际的运动,仅仅是球在原地旋转的情况下也是可能发生Optical flow的)
首先假设
- 同一点的投影在每一帧中看起来都是一样的
- 点不移动得很远的空间
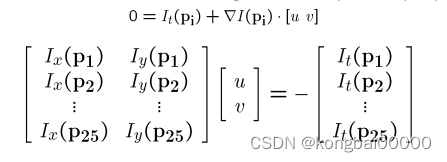
- 点和临近点运动方向一样

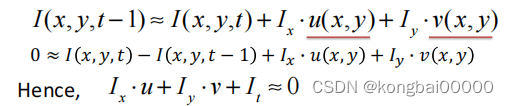
通过泰勒展开式我们可以进行简化:
Lucas-Kanade flow
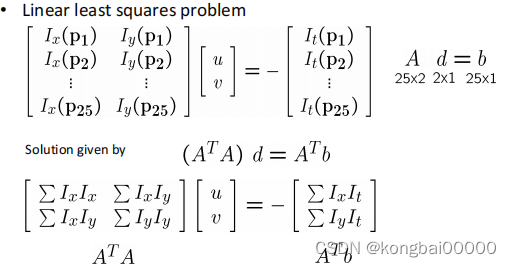
该系统可以通过观察二阶矩矩阵的特征值来求解,M的特征向量和特征值与边缘方向和大小有关,与最快强度变化方向上的最大特征值点相关的特征向量,其他特征向量与之正交。
Tracking
当我们有两张需要进行光流估计,我们可以计算从每一帧到下一帧的光流。
挑战:
- 模糊性: 需要找到好的特征来跟踪大的运动
- 外观的变化,遮挡,解遮挡:需要删除的机制,添加新的特征
- 漂移(drift):错误可能会随着时间的推移而积累,需要知道何时终止一个轨迹。
Shi-Tomasi feature tracker
- 利用二次矩矩阵的特征值寻找好的特征(要跟踪的特征是那些运动可以可靠地估计的特征)
- 需要一帧到一帧的特征移动的翻译模型
- 通过仿射配准到特征的第一个观察到的实例来检查轨迹的一致性
Template Matching
- 假设目标是一个图像模板T(x,y)
- 需要在连续的帧上匹配此模板。
Summary
– 在第一帧中初始化模型
– 给定的帧t-1的模型估计: 框架t的预测, 纠正框架t。
















 543
543











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









