







1. Example
Velocity_Control”>http://www.phidgets.com/docs/Linear_Actuator-_Velocity_Control
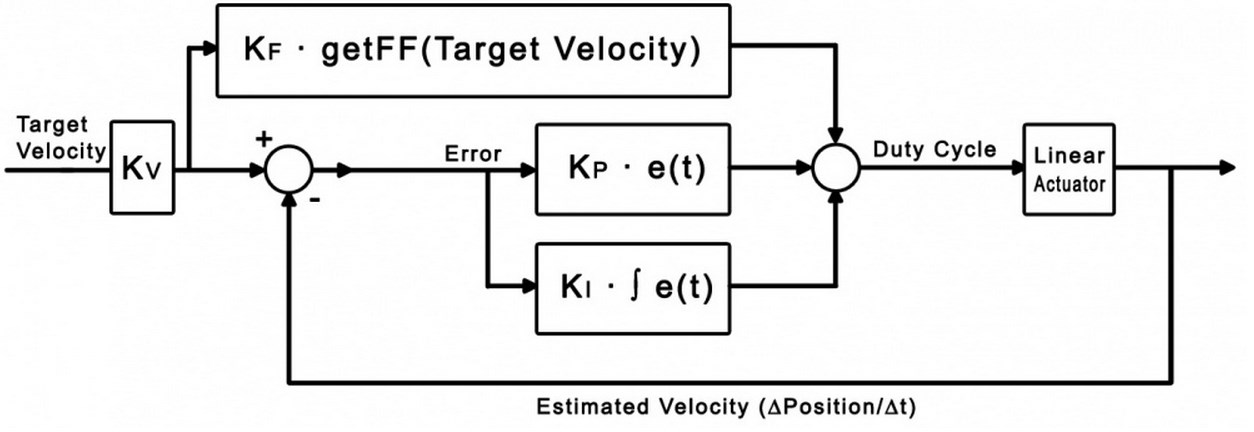
- In a system where you’re able to predict the behaviour of the parts in that system,
- you can make estimates of what the output of the control loop should be, and adjust accordingly.
- 这里的期望输出是duty cycle,我们可以直接将期望的duty cycle直接给到输出点
- 输入指令
output = (Kp * velocityError) + (Kf * getFF(velocityTarget)) + (Ki * integral);gefFF(velocityTarget)将velocityTarget从SensorValue/second转换为estimated duty circle
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1181
1181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









