






1. Example
http://www.phidgets.com/docs/Linear_Actuator_-_Velocity_Control
- In a system where you're able to predict the behaviour of the parts in that system,
- you can make estimates of what the output of the control loop should be, and adjust accordingly.
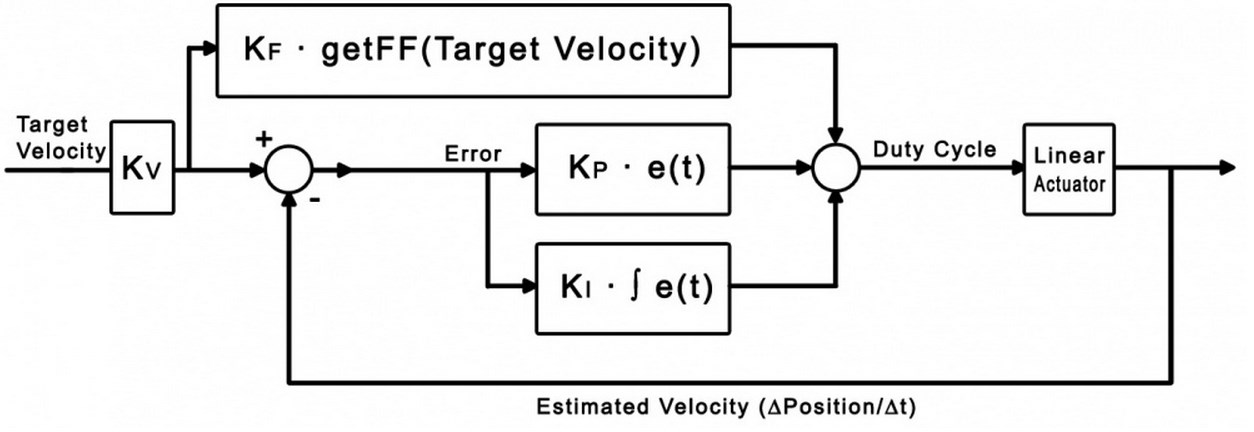
- 这里的期望输出是duty cycle,我们可以直接将期望的duty cycle直接给到输出点
- 输入指令
output = (Kp * velocityError) + (Kf * getFF(velocityTarget)) + (Ki * integral);gefFF(velocityTarget)将velocityTarget从SensorValue/second转换为estimated duty circle
2. Feed-forward in Position-Velocity Loop
2.1 目的
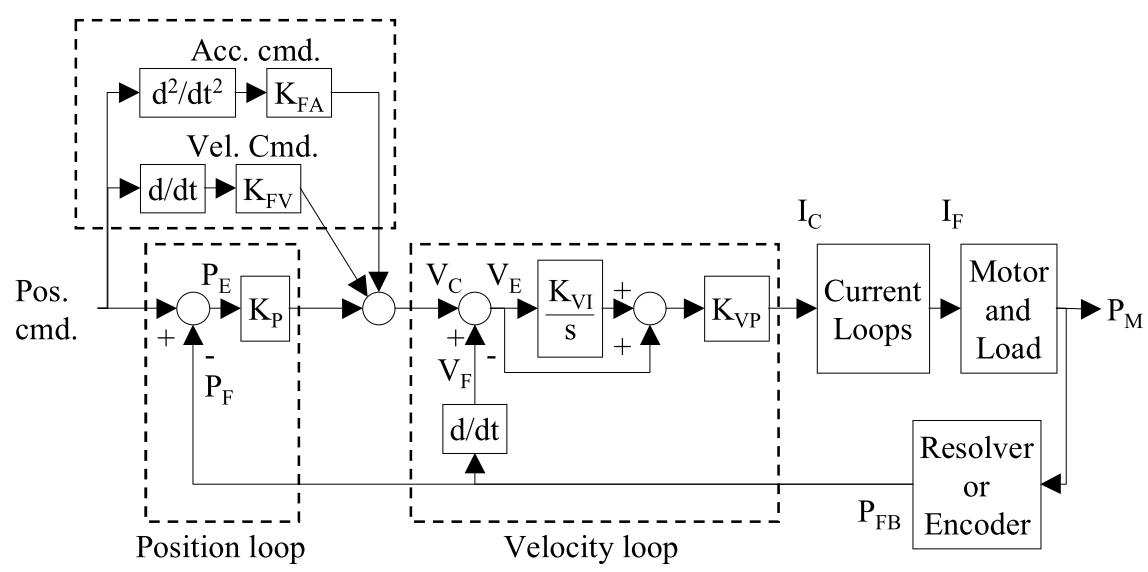
- Motion control systems use feed forward gains to speed up the response to rapidly changing position commands. 运动控制通过前馈方法加快系统对positon commands的响应速度。
- 一般而言,velocity loop faster, position loop slower
- Feed forward控制将指令跨过position loop,直接作用到velocity loop
2.2 效果
- 一般servo system,需要high loop gains,系统相应快,但容易造成不稳定
- feed-forward gain工作在环路外,不会对系统造成不稳定,提高servo system的动态特性
2.3 速度前馈/加速度前馈
速度前馈
- 优点:
K_FV将位置的剧烈扰动,快速转换为velocity command,大大提高响应效率 - 缺点:容易引起overshoot
加速度前馈
- 优点:
K_FA减少速度前馈引发的 缺点:很多positon controller不支持加速度前馈
转载请注明出处。















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









