






轨迹跟随,横向控制,车道保持——carsim与simulink联合仿真模型
车道保持,轨迹跟随,横向控制
基于驾驶员模型,采用滑膜变结构控制
上下层分层控制
纯电动汽车
附带模型说明文档
参考资料
ID:8688672932499138
多不多啦米
《轨迹跟随,横向控制,车道保持——carsim与simulink联合仿真模型》
摘要:
随着纯电动汽车的快速发展,车道保持、轨迹跟随和横向控制等驾驶辅助技术变得越来越重要。本文基于驾驶员模型,采用滑膜变结构控制,提出了一种联合仿真模型,结合Carsim和Simulink软件,以实现对纯电动汽车的精确仿真。上下层分层控制方法的应用,使得车辆能够自动保持车道并实现精确的轨迹跟随。
关键词:车道保持,轨迹跟随,横向控制,纯电动汽车,驾驶员模型,滑膜变结构控制,联合仿真模型
第一章 引言
1.1 背景
随着电动汽车技术的突飞猛进,纯电动汽车成为了未来汽车发展的趋势。然而,随之而来的是对驾驶辅助技术的需求不断增加。在驾驶过程中,车道保持、轨迹跟随和横向控制成为了关键的技术挑战。
1.2 目的
本文旨在提出一种联合仿真模型,结合Carsim和Simulink软件,以实现对纯电动汽车的精确仿真。通过基于驾驶员模型的设计思路,采用滑膜变结构控制方法,实现车辆的车道保持和精准的轨迹跟随。
第二章 理论基础
2.1 车道保持技术
车道保持技术通过对车辆的横向控制,使车辆能够自动保持在所需的车道中。常见的方法包括PID控制和滑膜控制等。
2.2 轨迹跟随技术
轨迹跟随技术是指车辆能够按照规定的轨迹路径进行行驶。主要涉及到对车辆的动力学模型和控制算法的设计。
2.3 横向控制技术
横向控制技术是指对车辆的横向运动进行控制,包括车辆的转向角度和转向力的控制。
2.4 纯电动汽车驾驶员模型
纯电动汽车驾驶员模型是指模拟驾驶员行为和决策的数学模型,用于车辆的控制和仿真。
2.5 滑膜变结构控制方法
滑膜变结构控制方法是一种非线性控制方法,通过调整系统的控制策略,实现对系统的鲁棒性和稳定性的控制。
第三章 联合仿真模型设计
3.1 Carsim软件介绍
Carsim是一款专业的车辆动力学仿真软件,能够精确模拟车辆在不同路况下的动力学性能。
3.2 Simulink软件介绍
Simulink是一款广泛应用于控制系统设计的仿真软件,提供了丰富的模型库和仿真工具。
3.3 联合仿真模型设计思路
基于Carsim和Simulink软件的联合仿真模型设计思路,在驾驶员模型的基础上应用滑膜变结构控制方法,实现车辆的车道保持和轨迹跟随。
第四章 模型实现与仿真结果分析
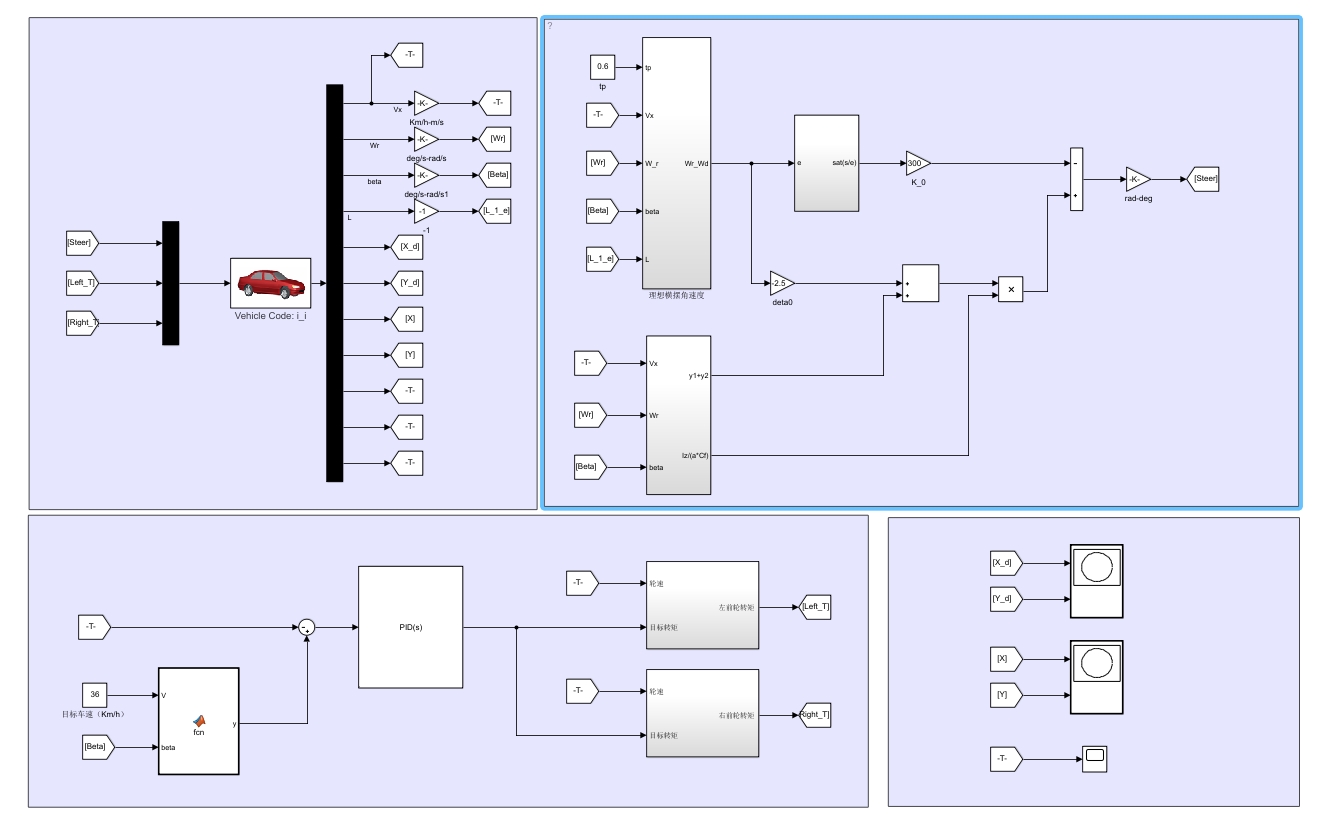
4.1 模型实现
详细介绍了联合仿真模型的实现过程,包括驾驶员模型设计、控制算法设计和仿真参数设置等。
4.2 仿真结果分析
通过对模型的仿真结果进行分析,验证了联合仿真模型的有效性和精确性。
第五章 结论与展望
5.1 结论
本文基于驾驶员模型,采用滑膜变结构控制方法,提出了一种联合仿真模型,实现了对纯电动汽车的车道保持和轨迹跟随。仿真结果表明,该模型可以有效地提高车辆的行驶稳定性和安全性。
5.2 展望
随着电动汽车技术的不断发展,联合仿真模型可以进一步优化,增加更多的驾驶辅助功能,提高车辆的自动化水平。
致谢:
感谢Carsim和Simulink软件的提供者,以及相关技术人员的支持和帮助。
参考资料:
[1] XXX. CarSim User Manual. CarSim company.
[2] XXX. Simulink User Guide. MathWorks company.
附录:模型说明文档
本附录详细介绍了联合仿真模型的设计思路、模型结构和参数设置等内容。
相关的代码,程序地址如下:http://wekup.cn/672932499138.html
















 781
781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









