







1、速度闭环控制就是根据单位时间获取的脉冲数(这里使用了M法测速)测量电机的速度信息,并与目标值进行比较,得到控制偏差,然后通过对偏差的比例、积分、微分控制,使偏差趋向于零的过程。
2、根据增量离散PID公式
PWM+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k):本次偏差
e(k-1):上一次的偏差
e(k-2):上上次的偏差
PWM代表增量输出
在我们的速度控制闭环系统里面只使用PI控制,因此对PID控制器可简化为以下公式:
PWM+=Kp[e(k)-e(k-1)]+Ki*e(k)
2、根据增量离散PID公式
PWM+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k):本次偏差
e(k-1):上一次的偏差
e(k-2):上上次的偏差
PWM代表增量输出
在我们的速度控制闭环系统里面只使用PI控制,因此对PID控制器可简化为以下公式:
PWM+=Kp[e(k)-e(k-1)]+Ki*e(k)
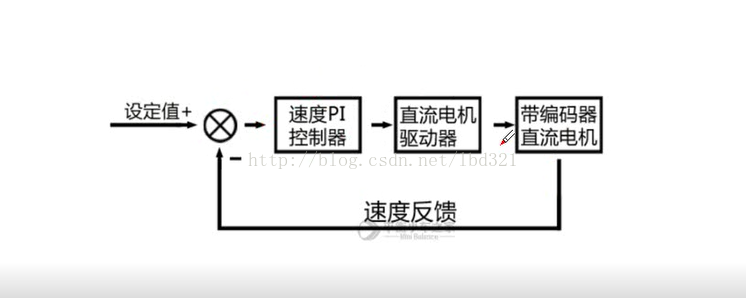
3、控制原理图

















 2983
2983

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









