







在了解滤波器的开始先看几个概念
传感器
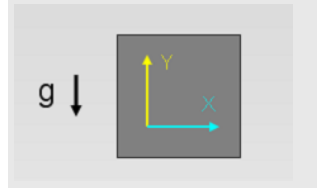
两轴加速计:
1.测量加速度实际上是推动每个单元的块。
2.可以用来测量重力加速度,上图中x轴加速度为0g,y轴加速度为1g。
3.可以用来测量倾角。
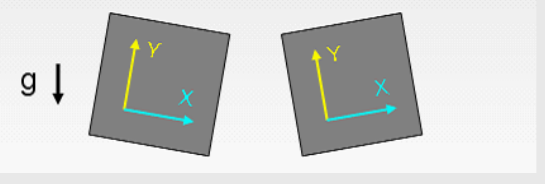
上图中x轴方向上有重力的作用,左边的图中x有正向的加速度,右边的图中x有负向的加速度。这就使y轴方向的加速度减小。
陀螺仪

作用:
1.测量角速度(旋转的角度)。
2.当静止时读“0”
3.读取旋转时的方向值。
对于MPU6050来说,加速计对四轴或者小车的加速计比较敏感,取瞬时值计算倾角误差比较大;而陀螺仪积分得到的角度不受加速度的影响,但是随时间的增加积分漂移和温度漂移带来的误差比较大。
加速计与陀螺仪的数据融合
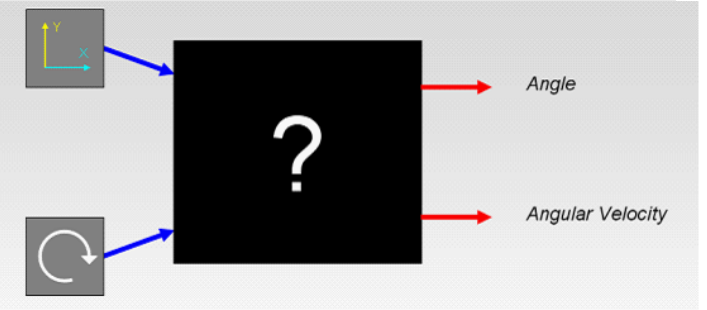
有什么好办法融合呢?下面看几个模型
直接融合:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4396
4396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









