







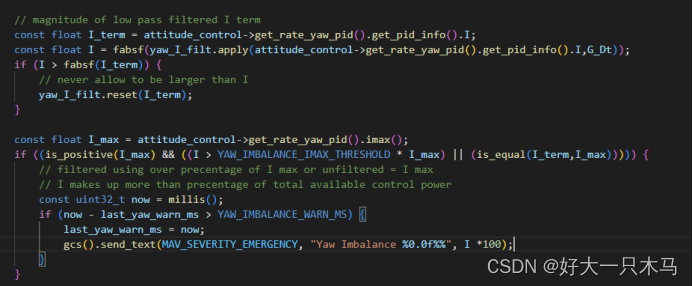
偏航不平衡警告是衡量车辆偏航工作力度的指标,警告将在偏航输出饱和之前触发。如果偏航输出饱和,则车辆的 保持偏航的能力将受到影响。而且,在最坏的情况下,这将导致车辆快速旋转。警告消息给出最大偏航输出的百分比。在100%时,它是饱和的。例如:
Yaw Imbalance 87%
这应该在硬件中修复。最常见的原因是电机在圆形臂上不垂直。如果不平衡仍然存在 电机可以稍微倾斜,使推力角有助于偏航的旋转方向。一些车辆可能对电机推力矢量非常敏感。
如果警告仅在激进偏航操作中出现,则可以通过提高ATC_RAT_YAW_IMAX来提高警告阈值。然而,可能也值得重新审视偏航曲调。
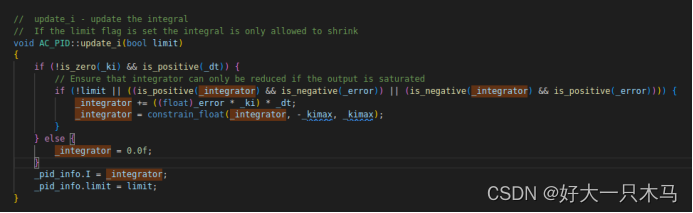
该信号值反映了姿态误差量差距比较大














 740
740











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









