






https://github.com/NVlabs/FoundationPose.git
1.下载数据

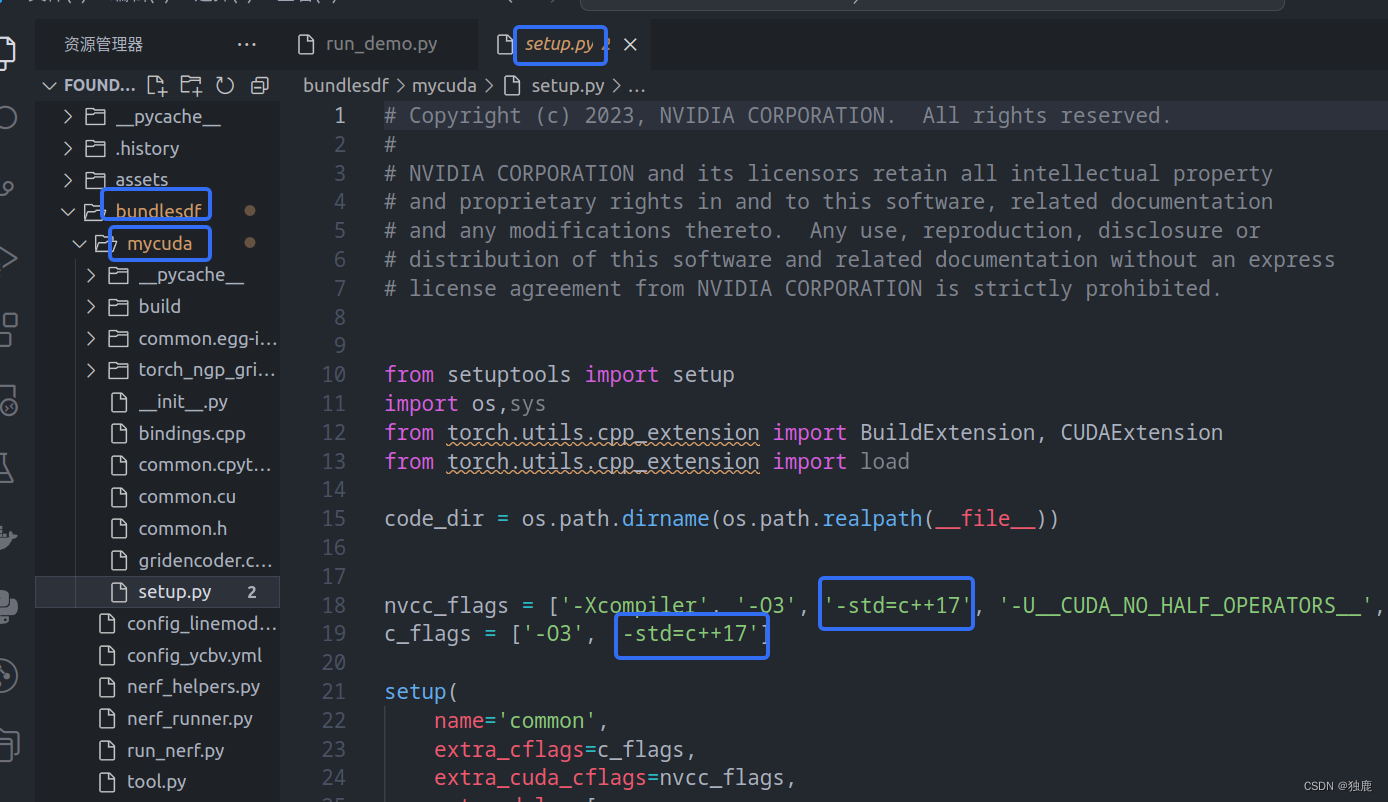
2.修改代码将c++14改为c++17
3.获取docker
docker pull shingarey/foundationpose_custom_cuda121:latest然后进入docker,再执行
bash build_all.sh4.可能会报Available platform plugins are: xcb.错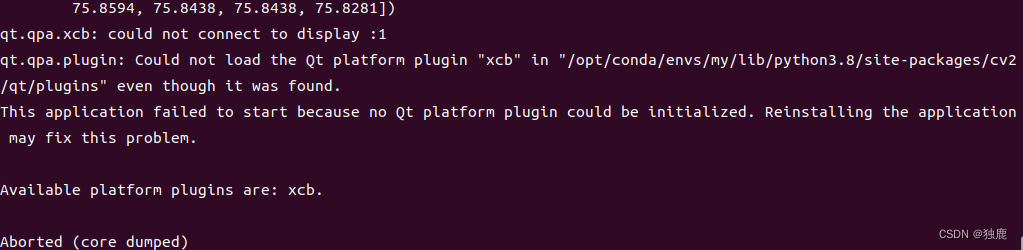
解决办法:再docker中无法调用图形化界面,注释掉72-73行
5.正常跑完
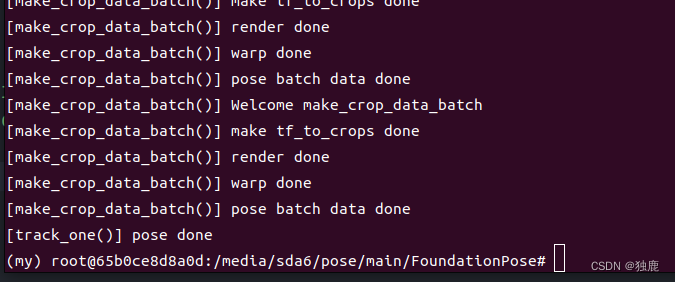
执行 python run_demo.py --debug 0
结果会保存在debug/ob_in_cam文件夹下。
执行python run_demo.py --debug 2
debug文件夹下
















 1418
1418











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









