






FoundationPose
安装
conda环境下搞了一下午,自己电脑的cuda版本太低了,放弃了,就直接装docker环境了。
docker要注意的是,docker要安装GPU版的,否则会报错。
docker: Error response from daemon: could not select device driver "" with capabilities: [[gpu]].参考解决方案
nvidia-container-toolkit
解析
1. 显示模型
为了显示3D模型,需要重新装下 pyglet的版本,
pip install pyglet==1.5.28
然后运行下面的代码。
import trimesh
mesh = trimesh.load('demo_data/mustard0/mesh/textured_simple.obj')
attributes = dir(mesh)
#attributes 中能包含所有类的所有属性和函数
print(attributes)
print(len(mesh.vertices)) #打印顶点数
scene = trimesh.Scene()
# 添加模型到场景
scene.add_geometry(mesh)
# 显示场景
scene.show()


2. run_demo 用于有模型的6D姿态估计
mesh = trimesh.load(args.mesh_file) #读取mesh
to_origin, extents = trimesh.bounds.oriented_bounds(mesh)
#to_origin是方向和位置,extents是尺寸大小
bbox = np.stack([-extents/2, extents/2], axis=0).reshape(2,3)
...
#初始化四个模块
scorer = ScorePredictor()
refiner = PoseRefinePredictor()
glctx = dr.RasterizeCudaContext()
est = FoundationPose(model_pts=mesh.vertices, model_normals=mesh.vertex_normals, mesh=mesh, scorer=scorer, refiner=refiner, debug_dir=debug_dir, debug=debug, glctx=glctx)
#初始化数据
reader = YcbineoatReader(video_dir=args.test_scene_dir, shorter_side=None, zfar=np.inf)FoundationPose函数是主要进行6D 姿态估计的函数,
model_pts=mesh.vertices #是mesh的顶点坐标
model_normals=mesh.vertex_normals #是mesh的顶点法线方向,是3D向量
mesh=mesh, #载入 3D 模型
scorer=scorer, #应该是对应论文3.4章节的打分预测
refiner=refiner, #应该对应论文3.3章的精细化预测部分
glctx=glctx,#RasterizeCudaContext函数是使用nvdiffrast库中的RasterizeCudaContext类,用于光栅化CUDA上下文(将3D场景转换为2D图像)
-------------------
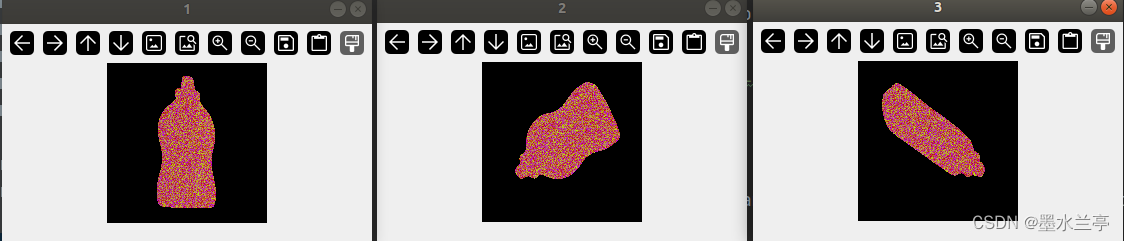
RasterizeCudaContext 的使用,解析了一下nvdiffrast_render, 光栅化就是将3D模型向不同的2D图像方向投影。
主要使用dr.rasterize 这一步进行具体执行
rast_out, _ = dr.rasterize(glctx, pos_clip, pos_idx, resolution=np.asarray(output_size))
mustard0 的demo为例
glctx 是dr.RasterizeCudaContext()类
pos_clip 维度 [252, 10983, 4] , 252个方向,顶点数10983个len(mesh.vertices),4个通道?
pos_idx 维度 [15728, 3], ,15728是网格面的数量len(mesh.faces) ,每行表示形成面的顶点的索引,意思是三个点成一个面
resolution = [160,160] , 期望输出的2D图像维度
得到的 rast_out 维度 (252, 160, 160, 4), 252个光栅化后的方向,每个图160*160, 4个通道(RGB +透明)
代码中进行了252个方向的光栅化投影,可能就是论文中提到的,粗略姿态方向。
以下是其中3个方向
颜色通道暂时没查出来在mesh中是怎么个储存形式,有个这:
mesh.visual.material.image
np.array(mesh.visual.material.image.convert('RGB'))如下所示,RGB和BGR反了

------------------
后面就是正常的输入图片和预测姿态,如果是第一帧,会使用物体的mask信息进行register
if i==0:
mask = reader.get_mask(0).astype(bool)
pose = est.register(K=reader.K, rgb=color, depth=depth, ob_mask=mask, iteration=args.est_refine_iter)
如果不是第一帧,会使用track_one ,根据前面的估计结果进行调整
pose = est.track_one(rgb=color, depth=depth, K=reader.K, iteration=args.track_refine_iter)















 981
981











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









