






作者 | 木亦有知 编辑 | 3D视觉开发者社区
IMU(inertia measurement unit)惯性传感器是指由3个加速度计和3个陀螺仪组成的组合单元,陀螺仪用来检测三个方向的角速度。根据原理的不同,陀螺仪可以分为以下3类:
-
机械式陀螺仪(mechanical gyroscopes)
-
光学式陀螺仪(optical gyroscopes)
-
MEMS陀螺仪(MEMS gyroscopes)
-
机械式陀螺仪(mechanical gyroscopes)
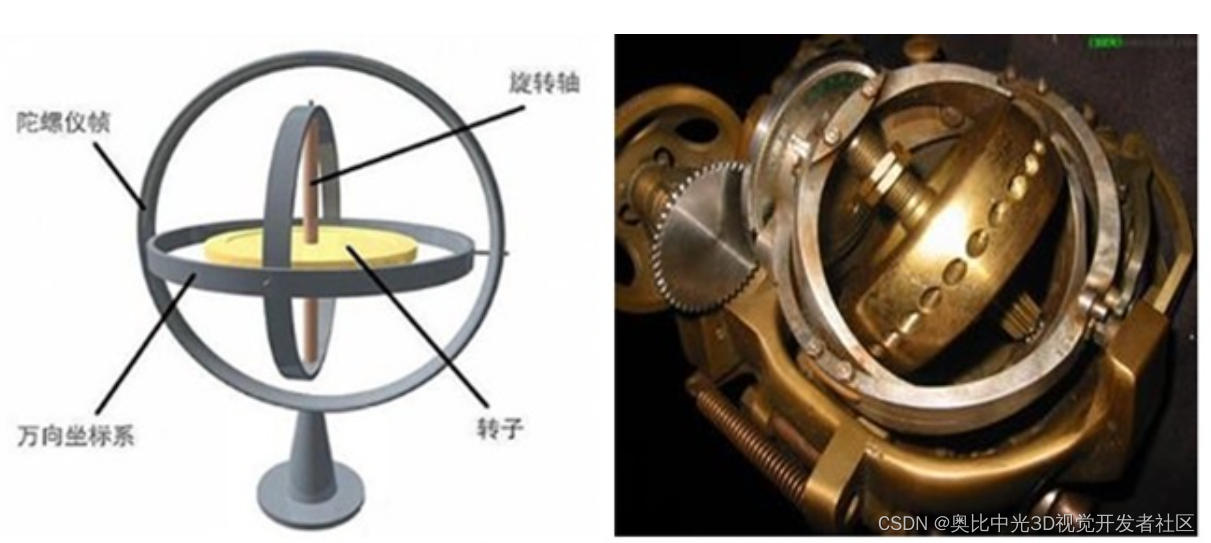
1.1原理
根据角动量守恒原理,当陀螺仪转子以高速旋转时,在没有任何外力矩作用在陀螺仪上时,陀螺仪的自转轴在惯性空间内的指向会保持稳定不变,同时反抗任何改变转子轴向的力量。即把一个高速旋转的陀螺仪放置到被测量的物体上,当被测物体做旋转运动时,陀螺仪的自转轴在惯性空间的指向会保持不变,依靠陀螺仪自转轴和被测物体的角度变化可推算出被测物体角度的变化(note:机械式陀螺仪测量的是角度,光纤式以及MEMS陀螺仪测量的是角速度)。
下面以质点为例简单推理下角动量守恒原理(动量矩守恒):
设质点某瞬时的动量为mv,对固定点O的矢径为r,如下图所示。质点的动量对固定点O的矩为一矢量,定义为质点对固定点O的动量矩,


上式对时间求导数得

上式右边第一项为零,根据动量定理
得

即:质点对固定点O的动量矩对时间的一阶导数等于作用力对同一点的力矩。如果没有外力作用或者作用于质点的力对于固定点O的力矩恒为0,则质点对该该固定点的动量矩保持不变,即质点的转动方向不发生任何变化。
2. 光学式陀螺仪(optical gyroscope)
光学陀螺仪的基础理论是法国科学家Sagnac提出“萨格纳克效应”(Sagnac Effect)效应。依据相干光学理论,来计算旋转角速度。Sagnac effect是光在相对于惯性空间转动的闭环光路中传播时存在的一种效应,即从同一光源发出的两束特征相等的光,以相反的方向在同一闭合光路中进行传播,最后汇合到同一探测点。当物体(激光器)没有角位移时,两束激光没有光程差,它们会聚在一起时不相干涉。如果物体(闭合光路)本身具有一个转动速度,那么光线沿着光路转动的方向前进所需要的时间、要比沿着这个光路转动相反的方向前进所需要的时间要多,两束激光相遇时就会产生干涉,以此计算出物体的角速度。
光学式陀螺仪有可以分为以下两种类型:
2.1 激光陀螺仪(RLG-ring laser gyroscope)
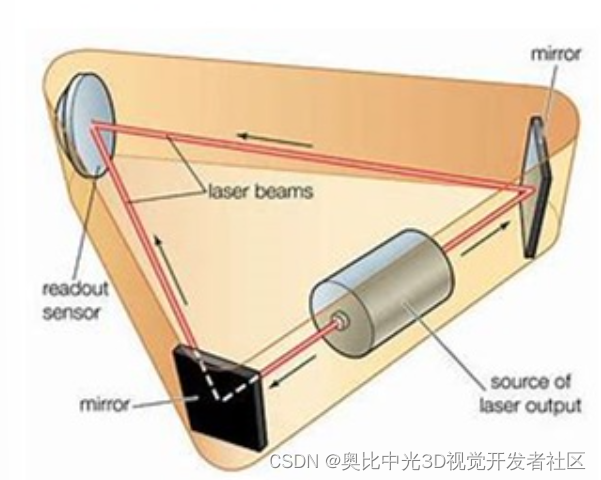
激光陀螺仪,发展于20世纪60年代,按光腔形状分有三角形陀螺和正方形陀螺,一般三角型激光陀螺最为常见。典型的激光陀螺仪的结构是这样的:它的底座是一块低膨胀系数的三角形陶瓷玻璃,在其上加工出等边三角形的光腔,陀螺仪就由这样闭合的三角形光腔组成,在三角形三个顶端放置反射镜形成闭合光路。利用Sagnac Effect效应可以计算出旋转的角速度。
激光陀螺仪,具有重量轻、尺寸小、精度高、可靠性好、动态范围大、响应时间短、耐冲击和振动、工作寿命和存放时间长等特点。目前,激光陀螺最高零偏稳定性可达1.5 × 10E−4 (˚)/h,广泛用于国防、航空航天及其他高端导航战略应用领域。
2.2光纤陀螺仪(FOG-Fiber optical gyroscope)
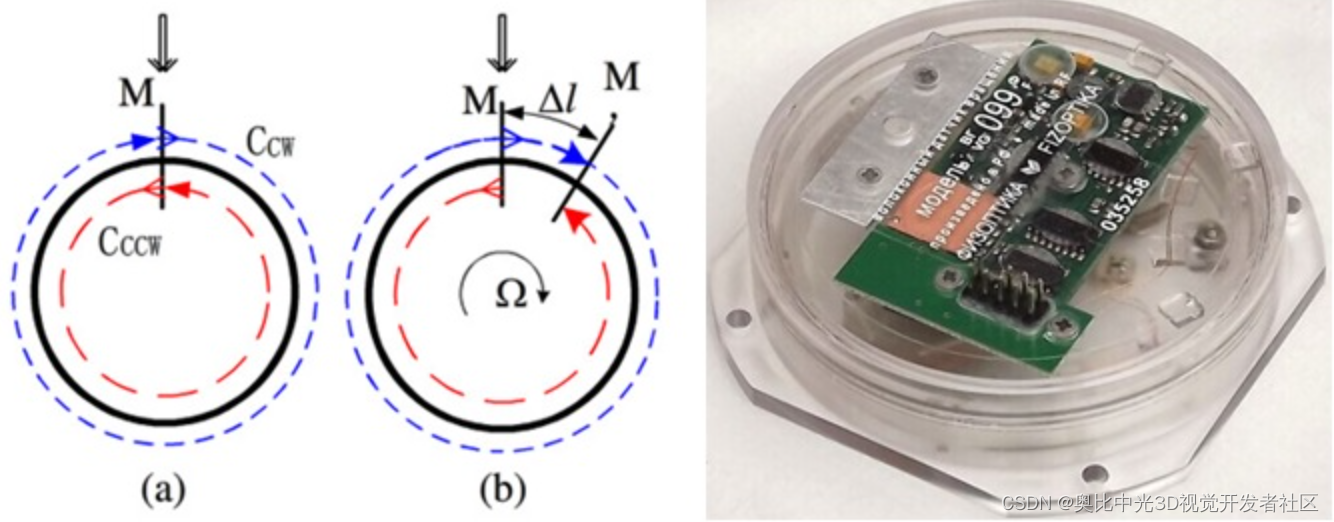
光纤陀螺仪即光纤角速度传感器,发展于20世纪80年代,是继激光陀螺之后的第二代光学陀螺。光纤陀螺仪对半导体激光器发出的激光进行分束,得到的两束光射入光纤线圈分别以顺时针和逆时针进行传播,利用萨格纳克(Sagnac)效应计算出角速度。光纤陀螺仪的成本比激光陀螺仪的低,适合产业化进行批量生产。光纤陀螺的零偏稳定性最高可达0.00003 (˚)/h ,在性能和成本优势方面已经超过激光陀螺仪,在不少军事和商业应用领域极具竞争力。
3. MEMS陀螺仪(MEMS陀螺仪)
MEMS 陀螺仪(gyroscope)的设计和工作原理可能各种各样,但是绝大多数的MEMS陀螺仪均采用测量振动物体的coriolis force的概念。
下面简单推导下科里奥利力。
如下图所示:当一个小球在一个旋转的圆盘上从A点向圆心O运动时。设t0为小球从A点出发的时刻,取一个很短的时间Δt'。t0时,A-B-O共线;经过Δt'后,小球运动的方向仍朝向圆心O,由于圆盘的旋转,到达的位置为B'点。
以转动系为参考系,球从A到B'的时间为

在Δt'时间内,球偏离AB的距离为
在Δt'很小的情况下,可以认为沿BB'的运动是匀加速运动而初速度为0,则

即由于科里奥利力带来的加速度为

如果物体在圆盘上没有径向运动,科里奥利力就不会产生。因此,在 MEMS 陀螺仪的设计上,这个物体需要被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并使物体在横向作微小震荡。MEMS 陀螺仪通常有两个方向的可移动电容板。径向的电容板加震荡电压迫使物体作径向运动,横向的电容板测量由于横向科里奥利运动带来的电容变化。因为电容变化、科里奥利力以及角速度三者相互关联,所以由电容的变化可以计算出角速度。
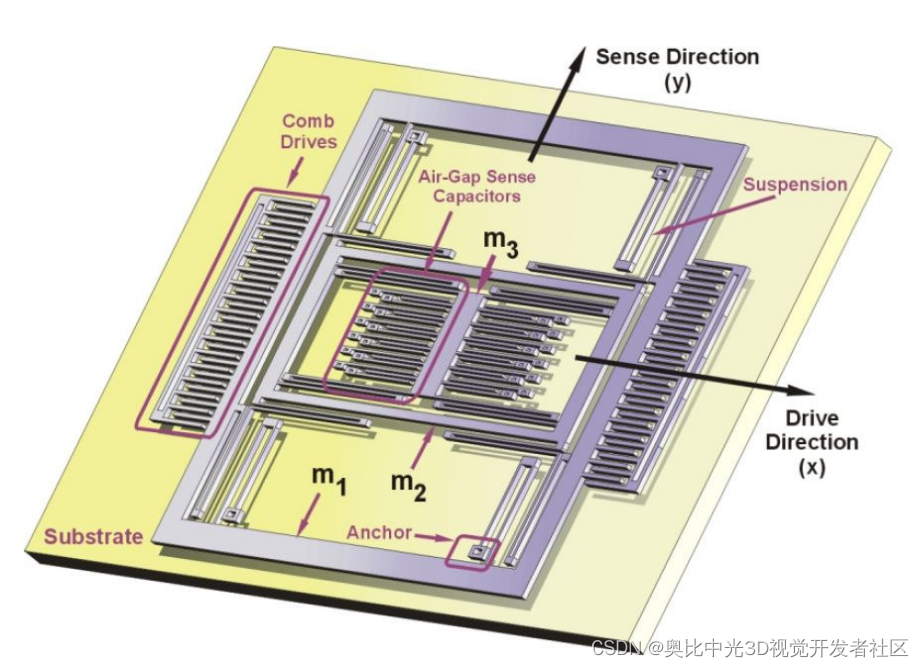
MEMS 陀螺仪没有旋转部件、不需要轴承,受益于微电子技术和精密机械加工技术,可以用微机械加工技术大批量生产,同时实现了传感器的小型化。
版权声明:本文为奥比中光3D视觉开发者社区特约作者授权原创发布,未经授权不得转载,本文仅做学术分享,版权归原作者所有,若涉及侵权内容请联系删文。
3D视觉开发者社区是由奥比中光给所有开发者打造的分享与交流平台,旨在将3D视觉技术开放给开发者。平台为开发者提供3D视觉领域免费课程、奥比中光独家资源与专业技术支持。
加入【3D视觉开发者社区】学习行业前沿知识,赋能开发者技能提升!
加入【3D视觉AI开放平台】体验AI算法能力,助力开发者视觉算法落地!


















 665
665

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









