






青少年机器人技术等级考试
实操题(一级)及评分标准(2023-9月)
一、实操考题
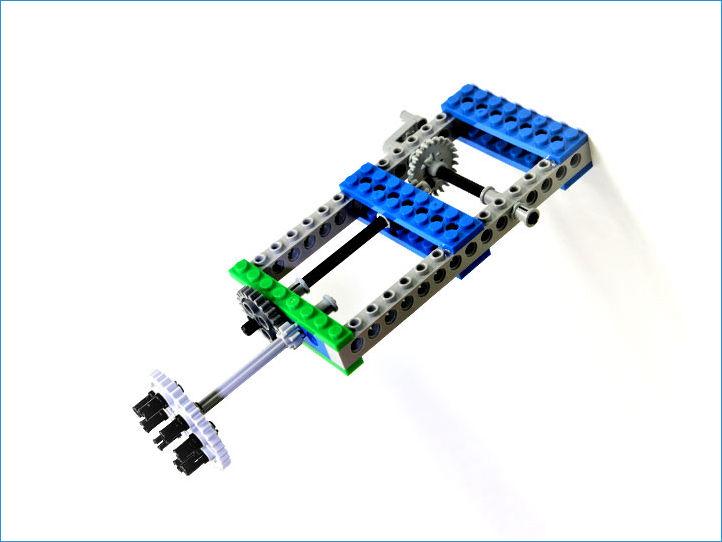
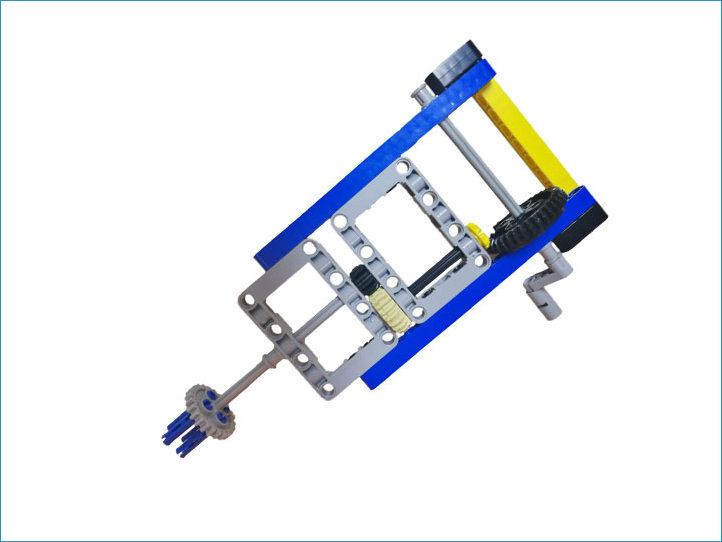
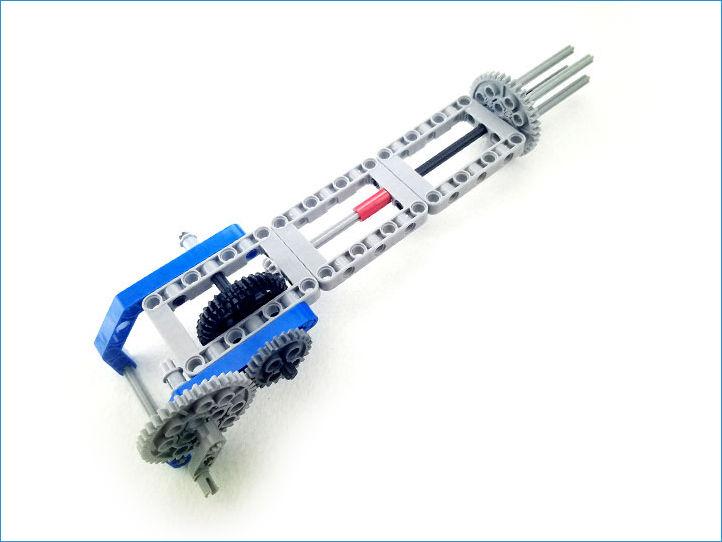
搭建说明:请考生制作一个手动搅拌器模型。
搭建要求:
-
具备手动搅拌器模型大体框架;
-
具备垂直啮合的齿轮和平行啮合的齿轮,且能实现加速;
-
具备手摇把手和表示搅拌部分的零件;
-
缓慢旋转手摇把手,搅拌部分加速旋转;
-
整体动作流畅。 器材说明: 考生作答时不指定任何器材,所搭建的模型在外形、结构、功能方面满足题目要求即可。以下样例模型选自经中国电子学会评审通过的青少年机器人技术等级考试一级、二级适用器材。仅供参考,不作为考试评分的唯一依据。 案例样图: 以下列举了相关器材模型样例,考生可任选其一作为参考。 二、评分说明 1、整体框架(40分)
-
作品零件结构是否和样例模型基本一致、结构完整,具备①搅拌器大体框架、②垂直啮合的齿轮组、③平行啮合的齿轮组、④手摇把手、⑤表示搅拌部分的零件,以上每缺少一点扣10分,缺少两点及两点以上扣20分。(20分) (2)作品相应部件的固定可靠程度;(10分)
(3)作品的整体协调性和美观性。(10分)
2、动力传递/表现形式(30分)
-
缓慢旋转手摇把手,搅拌部分加速旋转;(15分)
-
作品整体动作顺利流畅。(15分)
3、完成时间(10分)
在考试时间内完成得10分,超时1分钟扣1分。(10分)
超时10分钟以上不结束操作总成绩记为0分。
样例1

添加图片注释,不超过 140 字(可选)
样例2
添加图片注释,不超过 140 字(可选)
样例3

添加图片注释,不超过 140 字(可选)
样例4
添加图片注释,不超过 140 字(可选)
样例5

添加图片注释,不超过 140 字(可选)
样例6
添加图片注释,不超过 140 字(可选)
青少年机器人技术等级考试
实操题(二级)及评分标准(2023-9月)
一、实操考题
搭建说明:请考生制作一个电动机械尺蠖模型。
搭建要求:
-
具备电动机械尺蠖模型大体框架;
-
不可以采用皮带传动和链传动;
-
有曲柄连杆机构;
-
有棘轮机构关键部件(棘轮和棘爪);
-
开启电动机,机械尺蠖只能间歇性地向前移动;
-
整体动作流畅。
器材说明:
考生作答时不指定任何器材,所搭建的模型在外形、结构、功能方面满足题目要求即可。以下样例模型选自经中国电子学会评审通过的青少年机器人技术等级考试一级、二级适用器材。仅供参考,不作为考试评分的唯一依据。 案例样图:
以下列举了相关器材模型样例,考生可任选其一作为参考。
二、评分说明
1、整体框架(40分)
-
作品零件结构是否和样例模型基本一致、结构完整,具备①电动机、②曲柄连杆、③棘轮机构,以上每缺少一点扣10分,缺少两点及两点以上扣20分;(20分)
-
作品相应部件的固定可靠程度;(10分)
-
作品的整体协调性和美观性。(10分)
2、动力传递/表现形式(30分)
-
启动电动机,机械尺蠖只能间歇性地向前移动;(15分)
-
作品整体动作顺利流畅。(15分)
3、完成时间(10分)
在考试时间内完成得10分,超时1分钟扣1分。(10分)
超时10分钟以上不结束操作总成绩记为0分。
样例1
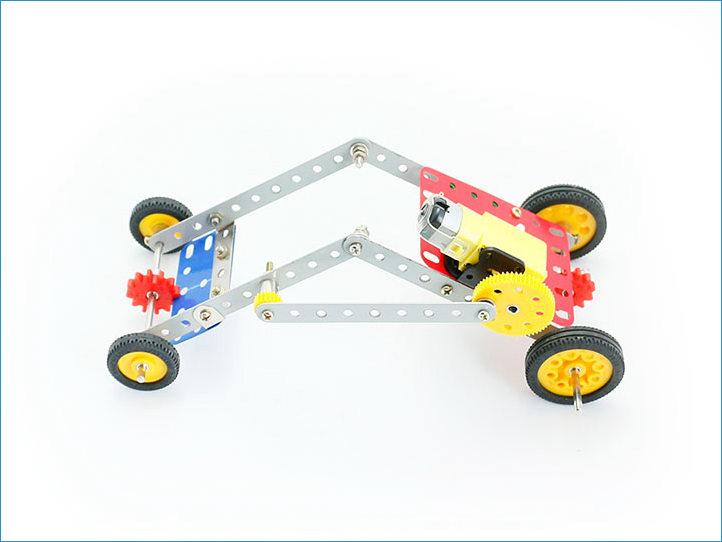
添加图片注释,不超过 140 字(可选)
样例2
添加图片注释,不超过 140 字(可选)
样例3

添加图片注释,不超过 140 字(可选)
样例4

添加图片注释,不超过 140 字(可选)
样例5

添加图片注释,不超过 140 字(可选)
样例6

添加图片注释,不超过 140 字(可选)
青少年机器人技术等级考试
实操题(三级)及评分标准(2023-9月)
-
实操考题 主题:智能门栏 器件:Atmega328P主控板1块,舵机1个,超声波传感器1个,LED灯2个(分别为LED_A和LED_B)及相应辅件。以上模块也可使用分立器件结合面包板搭建。 任务要求: 采用超声波传感器感应人的进出,感应范围为5-25cm。采用舵机实现栏杆的功能。智能门栏将通道分为外部和内部,其主要任务要求如下:
-
当感应区内没人时,栏杆放下,位于水平位置,LED_A和LED_B均熄灭;
-
当有人从外部进入感应区时,栏杆抬起,处于90度位置,同时LED_A点亮,LED_B熄灭;
-
当有人从内部进入感应区时,栏杆抬起,处于90度位置,LED_B点亮,LED_A熄灭;
-
根据上述要求,绘制流程图;
-
未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
-
将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS3_身份证号,大小5M以下;
-
将程序文件通过“上传附件”按钮进行上传;
-
程序编写过程中不得打开其它示例程序,如发现,实操成绩按照0分处理。
-
评分组成 1、电路搭设(20分) 元器件:
-
装置中包含LED灯模块或LED灯;(4分)
-
装置中包含超声波传感器;(3分)
-
装置中包含舵机;(3分) 电路搭设:
-
LED灯模块或LED灯与主控板正确连接;(4分)
-
超声波传感器与主控板正确连接;(3分)
-
舵机和主控板正确连接。(3分)
2、功能实现(80分)
说明:本程序有多种实现方法,只要效果符合要求即可。编写程序文件命名规则为:DJKS3_身份证号,考试完毕确认考生在考试页面以附件形式上传。
第一部分:流程图(20分)
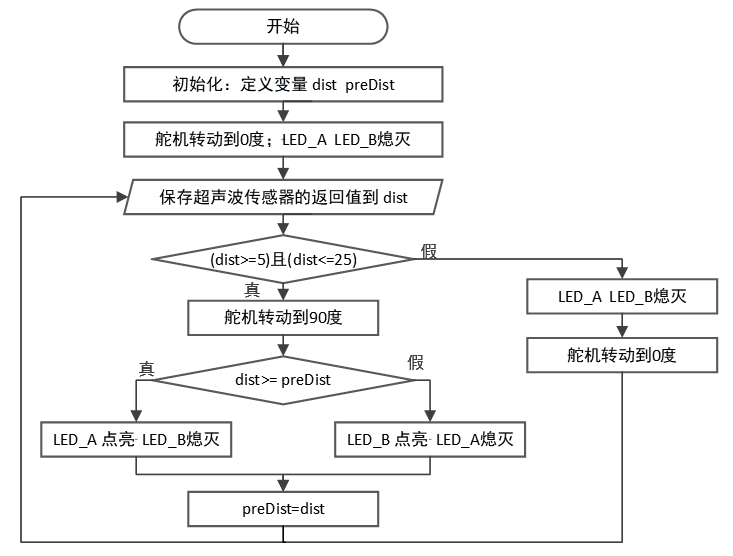
添加图片注释,不超过 140 字(可选)
流程图绘制:
-
【起始框】有且绘制正确;(2分)
-
【输入框】有且绘制正确;(2分)
-
【判断框】有且绘制正确;(2分)
-
【连接线】有闭环;(2分)
-
流程图绘制整齐;(4分) 流程图功能:
-
表达言辞清晰;(4分)
-
表达基本正确。(4分)
第二部分:程序功能实现(60分)
-
当感应区没人时,栏杆放下,位于水平位置,LED_A和LED_B均熄灭;(15分)
-
当感应区内有人时,栏杆抬起;(15分)
-
当有人从外部进入时,LED_A点亮,LED_B熄灭;(15分)
-
当有人从内部离开时,LED_B点亮,LED_A熄灭;(15分)青少年机器人技术等级考试
实操题(四级)及评分标准(2023-9月)
-
实操考题 主题:迎宾机器人 器件:Atmega328P主控板1块,舵机1个,超声波传感器1个,LED灯2个(分别为LED_A和LED_B)及相应辅件。以上模块也可使用分立器件结合面包板搭建。 任务要求: 使用超声波传感器和舵机实现迎宾机器人的眼睛和手的功能。大门位于超声波传感器前方15厘米的位置,在大门内侧设定了欢送区,范围为5-15厘米;在大门外侧设定了欢迎区,范围为15-25厘米。LED_A位于欢送区,LED_B位于欢迎区,舵机则位于大门处。迎宾机器人的主要任务要求如下:
-
当没有客人进出时,舵机位于90度位置,LED_A和LED_B均熄灭;
-
当客人经过欢送区时,舵机在30-90之间循环转动,挥手示意,同时LED_A闪烁,LED_B熄灭;
-
当客人经过欢迎区时,舵机在90-150度之间循环转动,挥手示意,同时LED_B闪烁,LED_A熄灭;
-
控制程序采用Arduino C/C++代码编写;
-
未作规定处可自行处理,无明显与事实违背即可。 说明:请考生在考试结束前,按照如下要求提交相关文件。
-
将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS4_身份证号,大小5M以下;
-
将程序文件通过“上传附件”按钮进行上传;
-
程序编写过程中不得打开其它示例程序,不得使用图形化软件生成代码,如发现,实操成绩按照0分处理。 参考资料:舵机类库及常用成员函数如下,供参考。 舵机类库: 头文件:Servo.h 类库对象:Servo 成员函数:attach(Pin) //指定引脚的关联引脚 write(angle)//功能是让舵机转动到指定的角度
-
评分组成 1、电路搭设(20分) 元器件:
-
装置中包含LED灯模块或LED灯;(4分)
-
装置中包含超声波传感器;(3分)
-
装置中包含舵机;(3分) 电路搭设:
-
LED灯模块或LED灯与主控板正确连接;(4分)
-
超声波传感器与主控板正确连接;(3分)
-
舵机和主控板正确连接。(3分)
2、功能实现(80分)
-
当程序启动,没有客人进出时,舵机位于90度位置,LED_A和LED_B均熄灭;(10分)
-
当客人经过欢送区时,舵机在45-90之间循环转动;(20分)
-
当客人经过欢送区时LED_A闪烁,LED_B熄灭;(10分)
-
当客人经过欢迎区时,舵机在90-135度之间循环转动;(20分)
-
当客人经过欢迎区时,LED_B闪烁,LED_A熄灭;(10分)
-
再次实现当没有客人进出时,舵机位于90度位置,LED_A和LED_B均熄灭。(10分)青少年机器人技术等级考试
实操题(五级)及评分标准(2023-9月)
-
实操考题 主题:串口交互数字滚动循环显示 器件:ESP32主控板1块,四位数码管1个,74HC595移位寄存器芯片(或模块)及相应辅件。以上模块也可使用分立器件结合面包板搭建。 任务要求: 使用74HC595移位寄存器芯片控制四位数码管实现数字的滚动循环显示,通过串口输入报文来设置显示的内容及其滚动显示的时间间隔。

添加图片注释,不超过 140 字(可选)
报文的格式为:xxxx:yyy,其中,xxxx为显示的内容,范围1000~9999,yyy为时间间隔。示例报文为:4567:400,其中:4567为数码管显示的数字;400表示所输入数字循环显示的时间间隔,数字自右向左循环动态显示,如下图所示。 具体任务要求如下:
-
装置通电启动后,在四位数码管上显示今天的日期:0914;
-
在串口监视器中输入相应的报文,并点击发送按键。将解析后的报文内容输出到串口监视器。以报文4567:400为例,串口监视器窗口输出的内容为Data:4567 -- Interval:400;
-
在四位数码管上显示解析后的内容,并以指定的时间间隔,实现自右向左循环动态显示。直至输入新的报文数据;
-
程序采用C代码编写,不得使用外部库调用;
-
未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
-
将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS5_身份证号,大小5M以下;
-
将程序文件通过“上传附件”按钮进行上传;
-
程序编写过程中不得打开其它示例程序,如发现,实操成绩按照0分处理。
参考资料:
数组NUM[] 保存的是0~9十六进制形式的数码管显示的段位信息。编程时可参考使用。
// 保存0~9
byte NUM[] = {0xFC, 0x60, 0xDA, 0xF2, 0x66, 0xB6, 0xBE, 0xE0, 0xFE, 0xF6};
-
评分组成 1、电路搭设(20分) 元器件:
-
装置中包含四位数码管;(4分)
-
装置中包含74HC595移位寄存器模块或芯片;(4分) 电路搭设:
-
四位数码管与74HC595移位寄存器模块或芯片正确连接;(6分)
-
74HC595移位寄存器模块或芯片与主控板正确连接。(6分)
2、功能实现(80分)
-
当装置通电启动后,在四位数码管上显示今天的日期:0914;(20分)
-
将串口监视器窗口输入的报文数据,按照指定的格式输出到串口监视器,(报文内容由测评老师决定并告知考生);(10分)
-
在四位数码管上显示解析后的报文内容;(15分)
-
报文内容按照指定的时间间隔,实现自右向左循环动态显示;(15分)
-
实现当串口监视器窗口输入的新报文数据,在四位数码管上显示解析后的新报文内容;(10分)
-
实现报文内容按照新指定的时间间隔,实现自右向左循环动态显示。10分)青少年机器人技术等级考试
实操题(六级)及评分标准(2023-9月)
-
实操考题 主题:动态光点 器件:ESP32主控板、MPU6050姿态传感器模块、8x8点阵、74HC595移位寄存器模块或芯片及相关附件。 任务要求: 根据MPU6050姿态传感器的俯仰角和滚转角的变化,控制8x8点阵中单个LED灯的亮灭,形成动态光点的效果。具体任务要求如下:
-
程序启动后,8x8点阵处于熄灭状态;
-
用手单击触碰传感器T0引脚,8x8点阵最外侧四周的LED灯点亮,中间区域LED灯熄灭;
-
再次用手单击触碰传感器T0引脚,8x8点阵最外侧四周的LED灯熄灭,程序进入动态光点状态;
-
当姿态传感器处于水平位置时,8x8点阵中间位置的LED灯点亮;
-
通过俯仰角控制8x8点阵X方向LED的移动,当俯仰角为-90度时,点亮的LED位于8x8点阵的最左侧,当俯仰角为90度时,点亮的LED位于8x8点阵的最右侧;
-
通过滚转角控制8x8点阵Y方向LED的移动,当滚转角为-90度时,点亮的LED位于8x8点阵的最上方,当滚转角为90度时,点亮的LED位于8x8点阵的最下方;
-
将当前俯仰角和滚转角的值,以及对应点亮LED灯的位置值输出到串口监视器;
-
程序采用C代码编写;
-
未作规定处可自行处理,无明显与事实违背即可。
说明:请考生在考试结束前,按照如下要求提交相关文件。
-
将程序放在一个文件夹中,压缩为1个“rar或zip”格式文件,并命名为:DJKS6_身份证号,大小5M以下;
-
将程序文件通过“上传附件”按钮进行上传;
-
程序编写过程中不得打开其它示例程序,如发现,实操成绩按照0分处理。
参考资料:
教材所使用类库MPU6050_tockn-1.5.2的例程如下,供参考。
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup() {
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop() {
mpu6050.update();
Serial.print("angleX : ");
Serial.print(mpu6050.getAngleX());
Serial.print("\tangleY : ");
Serial.print(mpu6050.getAngleY());
Serial.print("\tangleZ : ");
Serial.println(mpu6050.getAngleZ());
}
-
评分组成 1、电路搭设(20分) 元器件:
-
8x8点阵;(2分)
-
74HC595移位寄存器模块或芯片;(2分)
-
MPU6050姿态传感器;(2分) 电路搭设:
-
8x8点阵与74HC595移位寄存器模块或芯片正确连接;(4分)
-
74HC595移位寄存器模块或芯片与主控板正确连接;(4分)
-
MPU6050姿态传感器与主控板正确连接。(6分)
2、功能实现(80分)
-
程序启动后,8x8点阵处于熄灭状态;(5分)
-
用手单击触碰传感器T0引脚,8x8点阵最外侧四周的LED灯点亮,中间区域LED灯熄灭;(10分)
-
再次用手单击触碰传感器T0引脚,8x8点阵最外侧四周的LED灯熄灭;(10分)
-
当姿态传感器处于水平位置时,8x8点阵中间位置的LED灯点亮;(10分)
-
通过俯仰角控制8x8点阵X方向LED的移动,当俯仰角为-90度时,点亮的LED位于8x8点阵的最左侧;(10分)
-
当俯仰角为90度时,点亮的LED位于8x8点阵的最右侧;(10分)
-
通过滚转角控制8x8点阵Y方向LED的移动,当滚转角为-90度时,点亮的LED位于8x8点阵的最上方;(10分)
-
当滚转角为90度时,点亮的LED位于8x8点阵的最下方;(10分)
-
将当前俯仰角和滚转角的值,以及对应点亮LED灯的位置值输出到串口监视器。(5分)















 1963
1963

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









