






国内主要激光雷达公司产品简介
本篇是激光雷达系列的第二篇文章,主要介绍激光雷达市场份额情况、国内主要激光雷达公司产品Roadmap和主要产品。

附赠自动驾驶学习资料和量产经验:链接
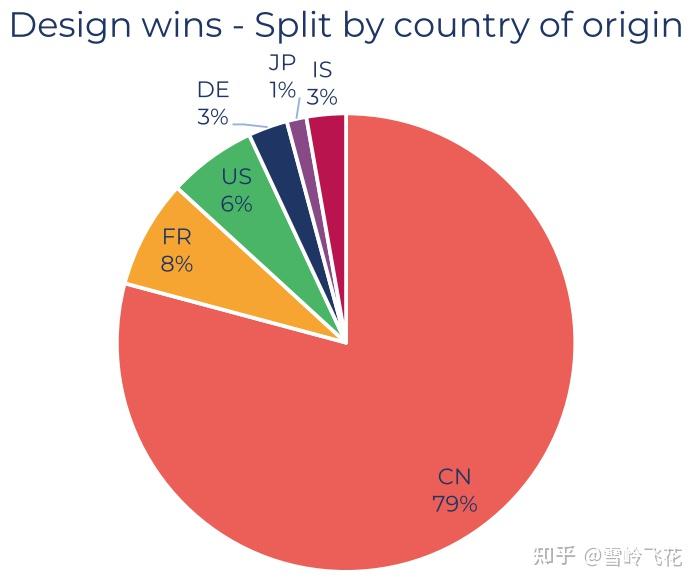
1. 2023年市场份额
在YOLO在2023年8月的报告中,统计了从2018年到2022年,在全球范围内激光雷达累计定点车型。其中,以国别区分的分布如下。可以看出,激光雷达主要有两个市场,一个是中国,一个是其他。
各激光雷达供应商的市占率如下,其中禾赛和速腾目前是市占率最高的两家公司,合计占据74%。

YOLO对2023年的预计如下:

各激光雷达公司的主要客户概览:

下文主要介绍市占率最大的几家公司的产品情况,包括禾赛、速腾、图达通、华为和大疆。
2. 禾赛
2.1 产品概览
禾赛的主要客户是:理想(L6/7/8/9,Mega),路特斯(Eletre,Emeya),高合(Hiphi Z/Y),长安(SDA平台),问界(M7,M9),飞凡,长城,零跑(C10,C16),比亚迪,哪吒,小米(SU7),一汽红旗(E001)等。

2023年,禾赛激光雷达在中国市场表现强劲。截止到2023年,交付累计突破30万个,2023年12月交付超过5万。

产品基本上以AT128为主,基本是安装1颗在车顶居中位置。

禾赛车用激光雷达的Roadmap如下:

禾赛激光雷达技术路线:

图片来源:禾赛招股书
2.2 AT128
AT128采用上述禾赛“芯片化 V1.5”方案。
- 整体结构:

图片来源:绿芯频道
- **扫描机构和光路方案:**AT128采用一维转镜方案,在水平方向上使用转镜扫描,垂直方向上使用128个激光器做电子扫描。

图片来源:绿芯频道
- **发射模块:**AT128一共有128个VCSEL激光器,每个激光器依次点亮,单个通道的点亮时间约十几纳秒。

图片来源:绿芯频道
VCSEL细节:

图片来源:绿芯频道
- **接收模块:**AT128采用SiPM(硅基光电倍增管),如下图中的粉红色区域。SiPM分为16个探测模组,之所以在水平方向上错开,是为了补偿水平方向上的角度差。

图片来源:绿芯频道
SiPM细节图:

图片来源:绿芯频道
禾赛自研了模拟前端芯片,一共8片,将SiPM的信号进行读取、解析和放大。

图片来源:绿芯频道
2.3 HT
禾赛HT雷达是AT128的降本版本,主要做硬件裁剪,软件方案保持不变。
相对于AT128,HT雷达的主要变更点是:
-
裁剪激光器数量:由128个改为100个;
-
纵向FOV:由25°改为20°;
-
点频:由153万降低到140万;
-
测距范围:由200m提到210m;
-
测距精度:由5cm提升到3cm;
-
ROI:增加中部ROI区域,ROI纵向角度范围是+2.2°~-5°,ROI区域内角分辨率由0.2°提升到0.1°;
(HT详细信息请关注雪岭飞花)
2.4 AT512
AT512是禾赛2024CES发布的最新一代的产品。基本性能如下:

-
**扫描机构:**AT512依然采用和AT128相同的一维转镜+电子扫描架构,不过转镜由3面更改为4面。
依然采用905nm光源。 -
**发射模块:**通道数增加到512,VCSEL阵列电光效率提升50%。
-
**接收模块:**由SiPM替换为3D堆叠SPAD,探测效率提升50%,通道噪声降低80%。

(AT512详细信息请关注雪岭飞花)
2.5 ET25
ET25 是禾赛车规级超薄远距激光雷达,可以置于挡风玻璃后。


00:06
2.6 FT120
FT120是基于VCSEL+SPAD架构,采用E-Scanning逐行电子扫描方式。
E-Scanning也称为Sequencial Flash,即同一时刻位于同一行160个通道激光器同时发射激光脉冲,然后下一行160通道紧接着发射,这样连续逐行发射120次,完成整个VCSEL面阵的扫描发射,构成一帧扫描,接收端同样采用一一对应的逐行探测模式。该扫描方式优点是单次多通道收发,可以大幅提高点云密度,但是通道间的串扰是一大挑战。


00:12
在核心器件层面:
-
发射采用VCSEL面阵,并且由两块自研的GaN驱动芯片进行脉冲出射控制。
-
接收端采用自研的SPAD芯片,类似于Sony IMX459,将光电探测端和数字逻辑端(含逻辑控制、TDC、读出电路等)集成到到一起,提升系统集成度,可以直接输出信号统计直方图信息,并借助成熟的标准CMOS工艺实现规模量产,持续降本。SPAD的超像素规模达到了160*120=19200,近2万个超像素,假如按每个超像素由3×3=9个像元构成,那么SPAD总像元数规模接近20万。

3. 速腾
3.1 产品概览
速腾主要客户:上汽智己的LS6、L7、LS7全系标配,小鹏的G6搭载两个,广汽昊铂HT智驾版标配三个,比亚迪仰望U8和U9标配三个,长城和问界的多款车型智驾版标配一个,极氪007车型标配一个。

速腾在2023年各季度的销量:

速腾M1P、M2和MX采用MEMS振镜方案,最新发布的M3将采用转镜+振镜扫描方案。

3.2 M1P
速腾 M1P 是采用 MEMS 扫描模式的激光雷达代表。
M1P具备 5 个激光收发模组,与收发模组一一对应的是 5 个固定反射镜,这 5 个固定反射镜将激光器的光束反射到中央的 MEMS振镜上,并随着 MEMS 振镜的不断振动实现 5 条光束的同时扫描。

图片来源:中信证券
M1P结构示意图:

M1P爆炸图:

M1P的MEMS工作示意图:

M1P可以实现ROI扫描模式,将纵向分辨率由0.2°提升到0.1°。

发射端采用EEL激光器,接收端采用SiPM:

图片来源:绿芯频道
3.3 M2
M2是M平台的第二代中长距激光雷达,提升测距与角分辨率,远场环境感知信息更丰富。
M2沿用RoboSense成熟的二维扫描技术打造,得益于平台化、模块化的设计,M2与M1Plus共用技术平台,继承测试验证积累,同时产品规格一致,客户可无缝迭代升级,帮助智驾汽车高效且低成本地升级迭代智驾系统。

3.4 MX
MX是基于M1P打造的降本产品,通过镜头扩束技术,利用单一模组实现120°的FOV覆盖,定位低成本中距激光雷达。
相对于M1P,MX大幅减少激光器的数量,从5个减到1个。角分辨率可以配置,最高可以实现0.1°*0.1°。
PDE提升30%,测距能力提升。
(MX详细信息请关注雪岭飞花)
3.5 M3
M3是速腾在2024CES发布的最新一代超长距激光雷达产品,面向 L3+智能驾驶场景。

M3有几个特点:
-
M3是速腾首个采用转镜(4面)+振镜的长距雷达产品
-
M3是业内首次采用940nm。相对于905nm波长,940nm波长分量在太阳光中含量更低,信噪比更好。同时,人眼对940nm的耐受程度比905nm提升15%。因此采用940nm波长的激光束可以大幅提升信噪比和感知能力。
-
M3是速腾首个采用VCSEL激光器的长距雷达产品,采用32个夹角是0.3°的VCSEL发射器。
3.6 E1
E1是速腾推出的基于Flash技术的补盲激光雷达:

发射端:
E1采用2D可寻址面阵VCSEL技术,不仅可以实现灵活扫描模式,还能将峰值功率降到一维扫描的十分之一。极大的提高能量利用率,根据不同测距场景实时动态调节局部发射功率,达到最优的能量配比,对功耗和散热更加友好,同时结合时分复用、空分复用等技术,有利于降低通道间串扰。(一维扫描一次点亮一列VCSEL线阵,整列发射功率相同,因此无法灵活配置不同区域的能量比例)
当然,相比于1D寻址,2D寻址对VCSEL芯片提出了更高要求,包括芯片工艺、外延设计等环节都需要做出较大的调整,对VCSEL厂商的综合能力是很大的考验,而且驱动芯片的逻辑控制复杂度也大大增加。
接收端:
E1采用速腾自研的SPAD面阵探测芯片,该芯片采用工艺更为先进的BSI 3D堆叠工艺,将SPAD面阵和SoC集成到一颗芯片。该芯片比Sony IMX459集成化程度更高,可以替代后端MCU、FPGA等处理控制芯片,相当于系统中不再需要单独的SoC芯片,不仅提升了潜在性价比,而且简化了上游供应链,对核心芯片的自主控制力更强。
速腾宣称该SPAD面阵规模超过25万像元,比IMX459的10万像元数还要多1.5倍。该芯片使得接收效率则提升了20%,不仅提供了超大视场角,还能保证足够高的角分辨率,进一步实现性能突破。
4. 图达通(原Innovusion)
4.1 产品概览
2023年12月15日,图达通英文名Innovusion更名为Seyond。Seyond,源于“See”(看)和“Beyond”(超越)的结合。
主要为蔚来汽车提供雷达。目前,蔚来汽车的全系车型都标配了一个雷达。图达通计划2024年推出一款低性能版雷达,将其用于蔚来低端品牌车型。
图达通早期一直在开发1550nm激光雷达,不过在2023 年上海车展上,图达通发布了基于 905nm 路线的「灵雀」系列产品以拓宽市场。
4.2 Falcon
图达通Falcon激光雷达采用转镜+振镜方案,转镜负责水平扫描,振镜负责垂直扫描。
根据图达通发布的专利《用于LiDAR系统的二维操纵系统》,光束从光源射出后打在振镜上,并被反射到转镜上,从转镜上反射到外界,再从被测物体处原路返回,回到接收光路中。多个光源呈现略微不同的角度,同时向振镜发光,即可实现多线扫描。实际中采用的是光纤一分四,四线同时扫描。
图达通的此种设计的一大优势在于能够灵活调节ROI。垂直方向上,可以设定振镜在某一角度区间内旋转较慢,则对应的范围内扫描点将会更密集。同时在一个特定的水平视场角内也可以设定ROI,这是通过改变激光器点频来实现的,由于转镜的转速是恒定不变的,因此只需周期性提升激光器点频。

图达通专利《用于Lidar系统的二维操纵系统》

图达通falcon实际扫描结构(图片来源:中信证券)
**发射模块:**是采用1550nm的光纤发射器。1550nm的光纤激光器效率较低,半导体激光器效率为40%,光纤激光器效率是10%。

图片来源:绿芯频道
**接收模块:**APD雪崩光电二极管。

图片来源:绿芯频道
4.3 Robin E

Robin E采用905nm技术路线,选用 EEL一维阵列脉冲激光器作为发射源,以及使用SiPM作为接收器,扫描系统采用一维转镜。

(Robin E详细信息请关注雪岭飞花)
5. 华为
主要客户是:问界 M7(旧款)、问界M9、阿维塔 11、阿维塔 12、极狐阿尔法 S、智界S7、奇瑞星纪元、智界S7。
华为目前量产主要以192线激光雷达D3为主。华为在 2023 年 12 月连发的两款新车:智界 S7 和问界 M9 都搭载了自研的最新 192 线激光雷达D3。
D3采用905nm+转镜扫描路线,采用1维转镜方案,由 8 个半导体激光器充当光源,并经过光学器件的整型成为均匀的线光斑。
6. 大疆览沃Livox
大疆览沃是市场上少有的采用棱镜方案的半固态激光雷达。
大疆览沃于2020年发布,同时获得了小鹏P5的订单。
主要产品是:
-
LivoxMid-40:官网售价仅599美金,
-
LivoxHAP:高端产品,官网售价1389/1599美金,水平方向的扫描宽度明显增加。















 1190
1190











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









