






特斯拉 AP (autopilot)和FSD(Full Self-Drive)
:::

附赠自动驾驶学习资料和量产经验:链接
:::
特斯拉 AP (autopilot)和FSD(Full Self-Drive)
[行业观察]
特斯拉Autopilot 自动辅助驾驶,可以车辆在车道内自动辅助转向、自动辅助加速和自动辅助制动。
「完全自动驾驶能力」套件(FSD)包含更多功能,并可通过软件更新持续提升相关性能。
值得注意的是,特斯拉AutoPilot功能一直备受争议。今年6月,美国国家公路交通安全管理局(NHTSA)发布了首份配备辅助驾驶系统(ADAS)汽车事故报告。在报告的12家企业中,特斯拉共发生了 273 起涉及辅助驾驶系统的事故,占据近 70%。
Autopilot的原始定义是指的搭载在飞机、轮船或者火箭上的控制轨道的系统,在这种系统中,人不需要一直控制,而自动驾驶的定义是指车辆能够自动感应周围环境并且无需人类的干预而自动驾驶。2016年8月16日以后特斯拉也正式将中国官网的介绍从“Autopilot自动驾驶”改成了“Autopilot自动辅助驾驶”。
Autopilot功能包括在车道内的自动辅助转向、加速和制动,但需要驾驶员主动监控,并且双手不能离开方向盘,一旦离开方向盘,Autopilot就会发出警告声提醒车主将双手放出方向盘,如果车主忽略警报,车就会自动减速,即便车主接管车辆,辅助驾驶功能也会被禁用,只有当下一次驻车时才能恢复自动辅助驾驶的功能。
1.1 视觉
自动驾驶目前的技术分为两大阵营,一类以特斯拉为首,还有一类是以刚刚首次获得有外部投资参与的、22.5亿美元融资的Waymo为首。
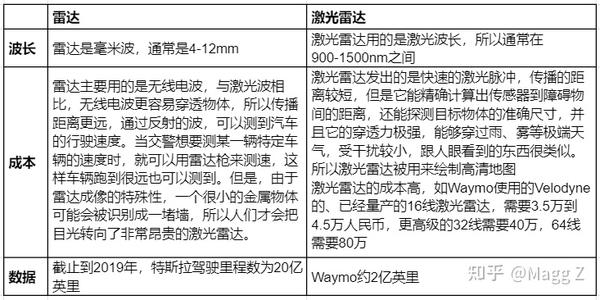
特斯拉依靠的是结合雷达、摄像头和超声波传感器的数据,搭建神经网络做实时的图像识别,并模拟人的行为,做出判断;
而Waymo是靠比雷达更昂贵更精确的激光雷达、摄像头、超声波传感器并结合已经有的高清地图数据库来判断应该做出什么反应。
1.2 AP变化
1.0与2.5
Autopilot 1.0 基于Mobileye的图像识别技术,主要数据来自于车顶的Mobileye摄像头,车首的雷达和周边雷达只是提供辅助信息。
而Autopilot 2.5则是基于雷达识别环境,主要数据来源于车身上的雷达,而辅助数据则来源于高精度地图和神经网络数据。
2.0与2.5
AP 2.5 与 AP 2.0 在硬件上一个看似不起眼的区别,便是摄像头从RCCC滤镜换成了RCCB滤镜。
Tesla 用到的 RCCC 和 RCCB滤镜。这其中C代表着Clear,也即是白色滤镜,于是当光线通过滤镜时,我们能得到更多的亮度信息而不是色彩信息,这样做的直接好处就是在昏暗的光线下,可以得到几倍于RGB滤镜的亮度信息,这对于CMOS传感器面积有限的车载应用尤其重要。B即是蓝色,所以 RCCB 就是 25%红色,50% 白色,25% 蓝色组成的滤镜。
随着技术的进步,不再仅仅只需要获得亮度和红绿灯感知(RCCC),还需要更多的颜色来感知整个世界,RCCC是最大限度做到辅助驾驶,让一切光线变得有利于”物体有无“的判断,RCCB是在不牺牲亮度的前提下,最大限度的感知整个世界。
FSD(Full Self-Drive)
FSD 10.69版本
根据release notes信息,
【车道识别】
1
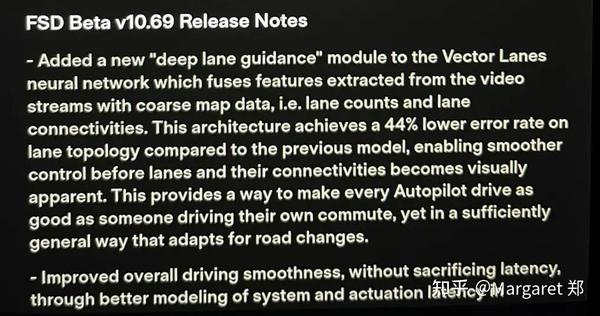
在矢量车道 (Vector Lanes) 神经网络中增加了一个新的 “深度车道引导” 模块,该模块将从视频流中提取的特征与粗略的地图数据,即车道数和车道连接性融合在一起。与以前的模型相比,这种架构在车道拓扑结构上实现了错误率降低44%,在车道及其连接性变得视觉上明确之前实现了更平滑的控制。
这方法充分适应道路变化。使自动驾驶效果与真人驾驶一样好。
2
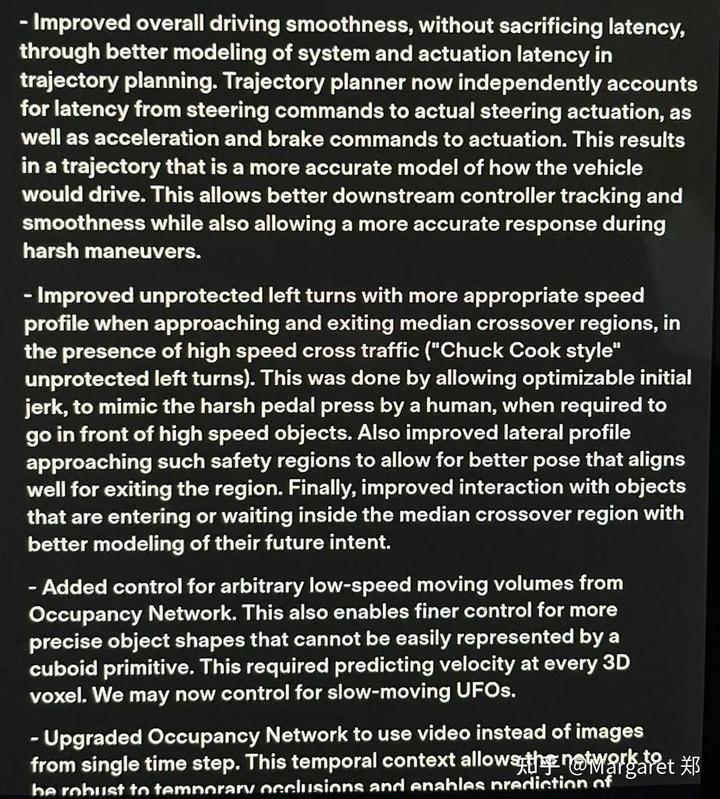
通过更好地模拟轨迹规划中的系统和驱动延迟,在不牺牲延迟的情况下,提高了整体驾驶的平稳性。轨迹规划器独立考虑了从转向指令到实际转向驱动的延迟,以及加速和制动指令到驱动的延迟。得出一个更准确的车辆驾驶模型的轨迹。
这使得下游控制器有更好的跟踪和平稳性,同时也允许在苛刻的操纵过程中做出更准确的反应。
3
在接近和离开中间交叉区域时,在高速交叉交通的情况下,改进了无保护的左转弯,其速度曲线更合适(“Chuck Cook 风格” 的无保护左转弯)。这是通过允许可优化的初始抽动来实现的,模仿人类在需要在高速物体前行驶时踩下的严厉的踏板。
还优化了接近这种安全区域的侧向轮廓轨迹,以允许更好的姿势,在离开该区域时能很好地符合预测轮廓轨迹。
最后,改进了与正在进入或在中间交叉区域内等待的物体的互动,更好地模拟它们的未来意图。
4
增加了对任意性低速移动量的控制。这也使更精确的物体形状得到更精细的控制,这些物体不容易用立方体基元表示。需要预测每个三维体素的速度。
现在可以基于慢速移动的不明物体进行控制规划。
5
升级了网络,使用视频而不是单一时间步的图像。这种时间背景使网络对暂时性的闭塞具有鲁棒性,并能预测占用流。同时,通过语义驱动的离群点剔除、硬例挖掘和规模增加了2.4 倍的数据集,优化了基础真相。
6
升级到一个新的两阶段架构,以计算物体运动(如速度、加速度、偏航率),其中计算被分配为 O(对象)而不是 O(空间)。
这将远处过路车辆的速度估计提高了 20%,而使用的计算量只有十分之一。
7
通过改善交通信号灯与滑行道的关联和让行标志与滑行道的关联,提高了受保护的右转弯的平稳性。
这减少了没有相关物体存在时的错误减速,也改善了存在时的让行位置。
8
减少了人行横道附近的错误减速。
这是根据行人和骑自行车者的运动优化了对他们意图的理解。
9
通过全矢量车道神经网络的更新,将自我相关车道的几何误差减少 34%,交叉车道相关错误减少 21%。通过增加每个摄像头特征提取器、视频模块、自回归解码器内部的大小,消除了网络架构中的信息瓶颈。以及增加硬性注意机制,大大优化了车道的精细位置。
10
在蠕行的时候,使速度曲线更加舒适,以便在保护可能被遮挡的物体时能更顺利地停止。
11
通过将自动标记的训练集的大小增加一倍,使动物的识别率提高了 34%。
12
在任何有物体可能穿越自我路径的交叉口,无论是否有交通管制,都能蠕行以获得可见性。
13
通过允许轨迹优化中的动态分辨率,提高了在有交叉物体的关键场景中停止位置的准确性,使其更多地关注更精细控制的区域。
14
通过让拓扑标记参与自回归解码器的注意操作,以及增加训练期间应用于分叉标记的损失,将分叉车道的识别率提高了 36%。
15
通过改进作为神经网络输入的车载轨迹估计,将行人和自行车的速度误差降低了 17%,特别是当正在转弯时。

16
通过调整训练期间使用的损失函数和提高标签质量,提高了物体检测的召回率,消除了 26% 的远处过路车辆的漏检。
17
通过将偏航率和横向运动纳入似然估计,改善了高偏航率情况下的物体未来路径预测。这有助于物体转入或离开自我的车道,特别是在交叉路口或切入场景中。
18
通过更好地处理即将到来的地图速度变化,提高了进入高速公路时的速度,这增加了并入高速公路的信心。
19
通过考虑领先车辆的颠簸,减少了从停止处启动时的延迟。
20
通过评估他们当前的运动状态和预期的制动曲线,能够更快地识别闯红灯者。
FSD Beta 10.13
2022年7月向客户推出,该版本主要的特点在于将更好地处理困难的左转弯,例如未受保护的左转弯。
根据FSD Beta 10.13发行说明中相关介绍,
【车道保持】
车道位置误差提高 5%,车道召回率提高 12%。
通过在网络架构中添加远程跳过连接和更强大的干线,将交叉和合并车道的车道位置误差提高了 22%。
【视觉,目标识别】
通过改进用作神经网络输入的车载轨迹估计,将行人和骑自行车者的速度误差提高了17%,特别是当自我转弯时。
通过将自动标记训练集的大小增加一倍,将动物检测召回率提高了 34%,并将误报率降低了 8%。
通过调整训练期间使用的损失函数和提高标签质量,将远处交叉车辆的检测召回率提高了 4%。
通过在训练集中增加 20% 的示例,将车辆的“停放”属性提高了 5%。
升级占用网络以检测动态对象,并通过添加视频模块,调整损失函数以及向训练集添加37k新剪辑来提高性能。
通过更好地将行人和骑自行车的人归类为不打算与自我互动,减少了人行横道周围的错误减速。
通过适当情况下在车道内轻柔抵消,减少锥体或堵塞的虚假车道变化。
------
据了解,FSD Beta自2020年10月发布以来,特斯拉一直在推出其 FSD Beta 技术的增量更新,更新通常每两周进行一次。一旦特斯拉的Autopilot和Full-Self-Driving Beta开发团队完成软件更新,它就会在内部进行测试,然后发送到员工汽车上一段时间,然后再发布给beta测试人员。
目前FSD Beta 仅在美国和加拿大推送,而且只有安装了特斯拉FSD驾驶辅助系统的车主才能加入FSD Beta计划,并且需要达到相应的安全评分等级。今年5月份,马斯克在迈阿密参加All in Sumit技术大会讨论时表示,参加FSD Beta(完全自动驾驶测试版)的车主大约有10万人,到2022年年底,将把测试人数扩大到约100万人。

FSD在中国
2019年6月,特斯拉官方正式向中国市场内全部选配了FSD完全自动驾驶的车型,推送最新版本NOA,能够令车辆自动驶入和驶出高速公路匝道或立交桥岔路口,并超过行驶缓慢的车辆。
NOA,Navigate on Autopilot,自动辅助导航驾驶,也有叫导航辅助驾驶或领航辅助功能,本质意思是把导航和辅助驾驶结合。相比于传统的自适应巡航功能,NOA功能的特点是能够自主判断驶入、驶出高速的时机以及自主判断超车的时机,并实现自动变道超车而不需要人为干预。















 2468
2468











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









