







体素滤波:
个人理解就是把整个点云数据按照某个设定的大小,将其分割成一个个小的立方块儿,在每个立方块儿中选取一个有代表性的点(可以是立方块儿中所有点的重心点也可以是中心点,或者是距离中心最近的点),过滤掉其他点,这样可以保持点云的整体轮廓和形状。
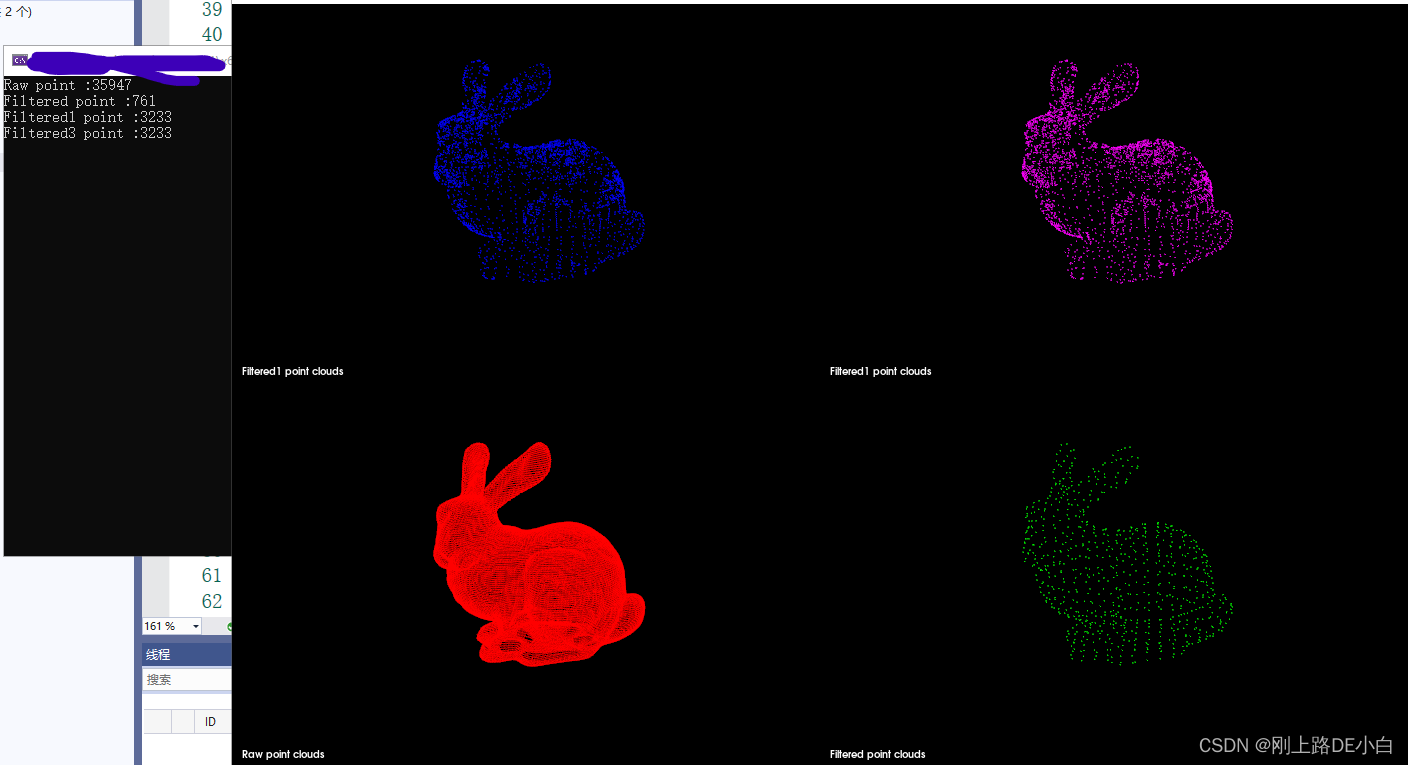
以下代码分别采用重心(VoxelGrid)、中心(ApproximateVoxelGrid)以及距离中心最近的点(用kd树进行计算)分别滤波并展示:
这里说明一下:
1.前两个过滤后的点可能不是原始点云中的点,第三个一定是原始点云数据中的点;
2.VoxelGrid滤波中可联合使用setLeafSize函数和setMinimumPointsNumberPerVoxel函数实现每个体素内的最小点数的约束
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/filters/approximate_voxel_grid.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <boost/thread/thread.hpp>
#include <liblas/liblas.hpp>
using namespace std;
//Demo5 体素滤波
int main(int argc, char** argv)
{
//读取点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud <pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered1(new pcl::PointCloud<pcl::PointXYZ>);
//pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered2(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCDReader reader;
reader.read("D:/bunny.pcd", *cloud);
cout << "Raw point :" << cloud->width * cloud->height << endl;
//体素滤波 取最小体素内的重心
pcl::VoxelGrid<pcl::PointXYZ> vg;
vg.setInputCloud(cloud);
//设置最小体素边长
vg.setLeafSize(0.01f, 0.01f, 0.01f);
//setLeafSize参数的另一种初始化方式
//Eigen::Vector4f leaf_size{ 0.01,0.01,0.01,0 };
//vg.setLeafSize(leaf_size);
//vg.setMinimumPointsNumberPerVoxel(10); // 设置每一个体素内需要包含的最小点个数
vg.filter(*cloud_filtered);
cout << "Filtered point :" << cloud_filtered->width * cloud_filtered->height << endl;
//体素滤波 取中心
pcl::ApproximateVoxelGrid<pcl::PointXYZ> avf;
avf.setInputCloud(cloud);
avf.setLeafSize(0.01, 0.01, 0.01);
avf.filter(*cloud_filtered1);
cout << "Filtered1 point :" << cloud_filtered1->width * cloud_filtered1->height << endl;
//体素滤波 取最小体素内距离中心最近的实际点
//K近邻搜索
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloud);
//
pcl::PointIndicesPtr inds = std::shared_ptr<pcl::PointIndices>(new pcl::PointIndices());
for (size_t i = 0; i < cloud_filtered1->points.size(); i++)
{
pcl::PointXYZ searchpoint;
searchpoint.x = cloud_filtered1->points[i].x;
searchpoint.y = cloud_filtered1->points[i].y;
searchpoint.z = cloud_filtered1->points[i].z;
int k = 1;
vector<int> pointIdxNKNSearch(k);//k个元素的vector
vector<float> pointNKNSquaredDistance(k);
if (kdtree.nearestKSearch(searchpoint, k, pointIdxNKNSearch, pointNKNSquaredDistance) > 0)
{
inds->indices.push_back(pointIdxNKNSearch[0]);
}
}
pcl::PointCloud<pcl::PointXYZ>::Ptr final_filtered(new pcl::PointCloud<pcl::PointXYZ>);
pcl::copyPointCloud(*cloud, inds->indices, *final_filtered);
cout << "Filtered3 point :" << final_filtered->width * final_filtered->height << endl;
//结果可视化
boost::shared_ptr<pcl::visualization::PCLVisualizer> Viewer(new pcl::visualization::PCLVisualizer("show"));
int v1(0);
int v2(0);
int v3(0);
int v4(0);
Viewer->createViewPort(0.0, 0.0, 0.5, 0.5, v1);
Viewer->setBackgroundColor(0, 0, 0, v1);
Viewer->addText("Raw point clouds", 10, 10, "v1_text", v1);
Viewer->addPointCloud<pcl::PointXYZ>(cloud, "Raw cloud", v1);
Viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 0, "Raw cloud", v1);
Viewer->createViewPort(0.5, 0.0, 1.0, 0.5, v2);
Viewer->setBackgroundColor(0, 0, 0, v2);
Viewer->addText("Filtered point clouds", 10, 10, "v2_text", v2);
Viewer->addPointCloud<pcl::PointXYZ>(cloud_filtered, "Filtered cloud", v2);
Viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 1, 0, "Filtered cloud", v2);
Viewer->createViewPort(0.0, 0.5, 0.5, 1.0, v3);
Viewer->setBackgroundColor(0, 0, 0, v3);
Viewer->addText("Filtered1 point clouds", 10, 10, "v3_text", v3);
Viewer->addPointCloud<pcl::PointXYZ>(cloud_filtered1, "Filtered1 cloud", v3);
Viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 0, 0, 1, "Filtered1 cloud", v3);
Viewer->createViewPort(0.5, 0.5, 1.0, 1.0, v4);
Viewer->setBackgroundColor(0, 0, 0, v4);
Viewer->addText("Filtered1 point clouds", 10, 10, "v4_text", v4);
Viewer->addPointCloud<pcl::PointXYZ>(final_filtered, "Filtered2 cloud", v4);
Viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1, 0, 1, "Filtered2 cloud", v4);
Viewer->setWindowName("VoxelGrid");
while (!Viewer->wasStopped())
{
Viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
return 0;
}结果展示:
具体算法原理及详细介绍可移步参考文献:
PCL体素滤波器_点云侠的博客-CSDN博客_pcl 体素滤波















 153
153











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









