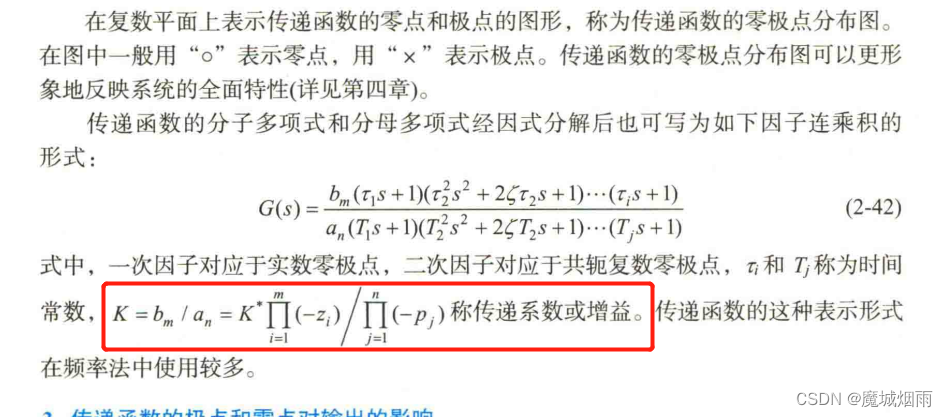
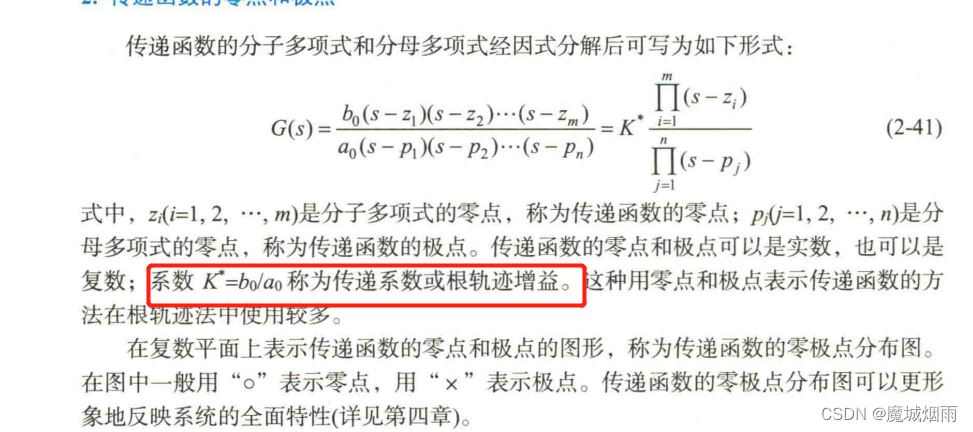
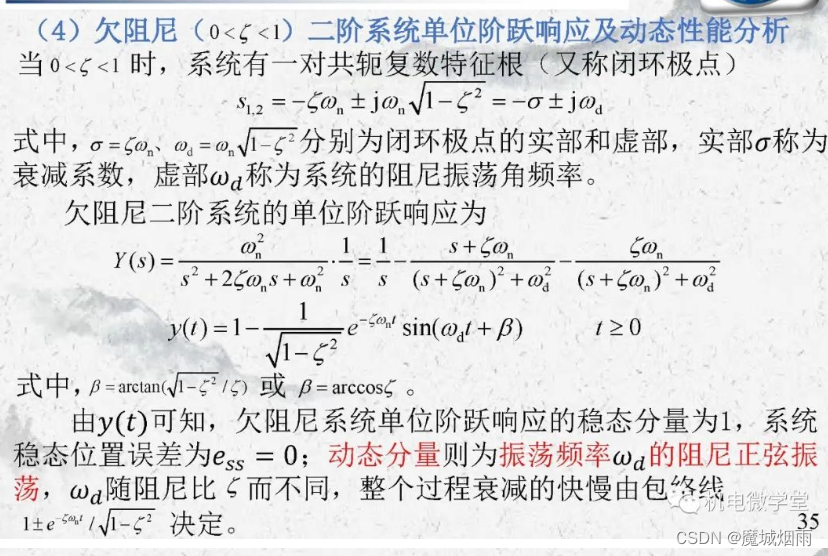
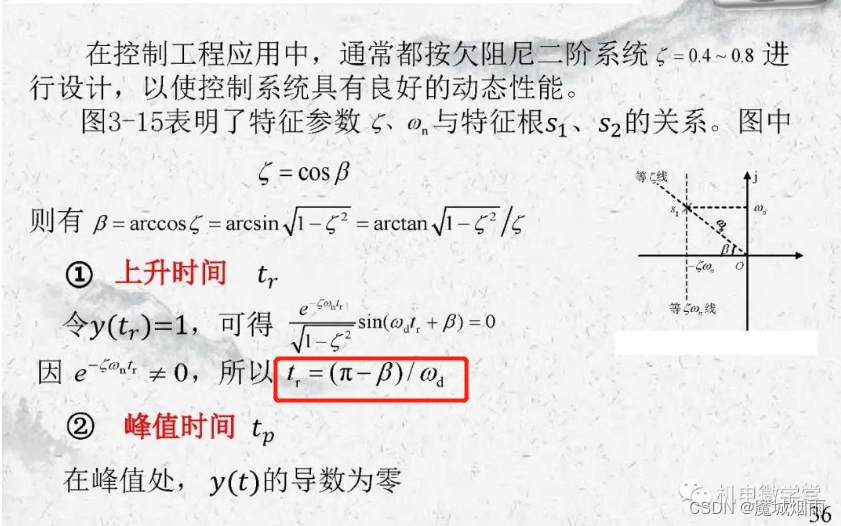
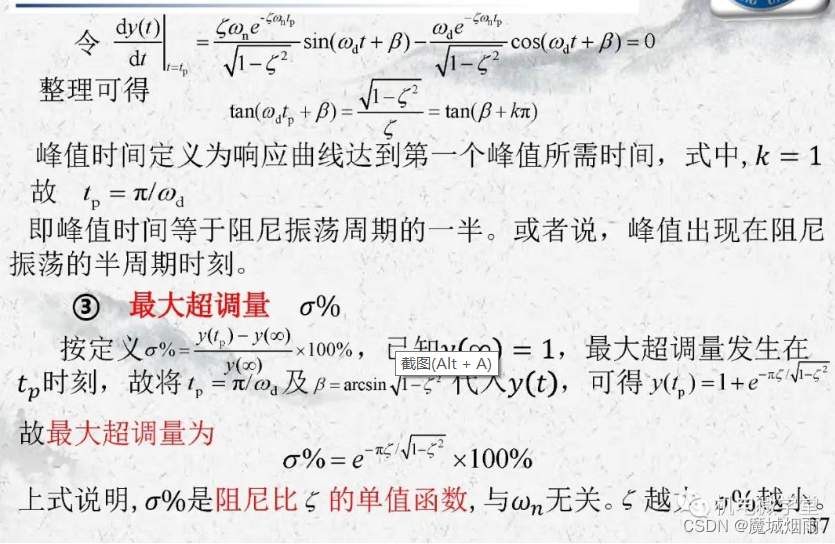
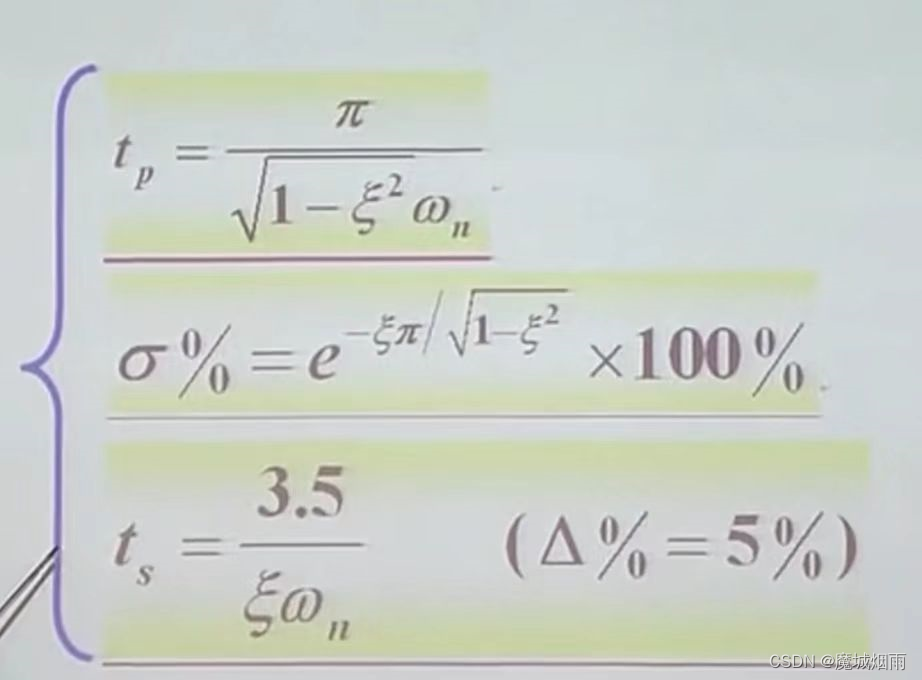
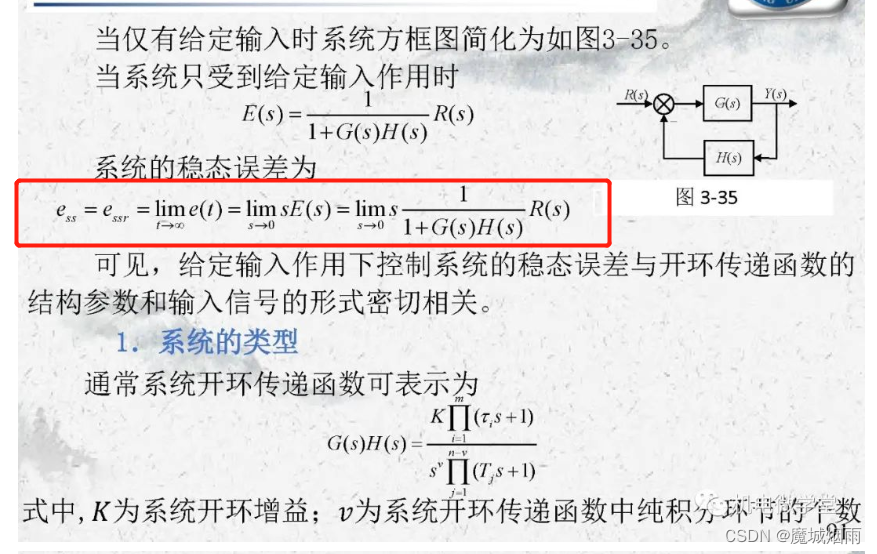
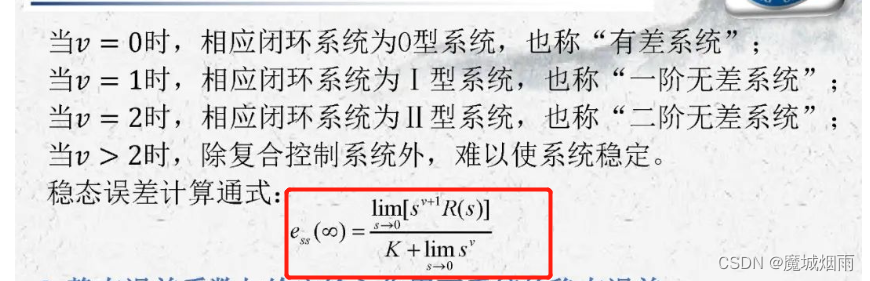
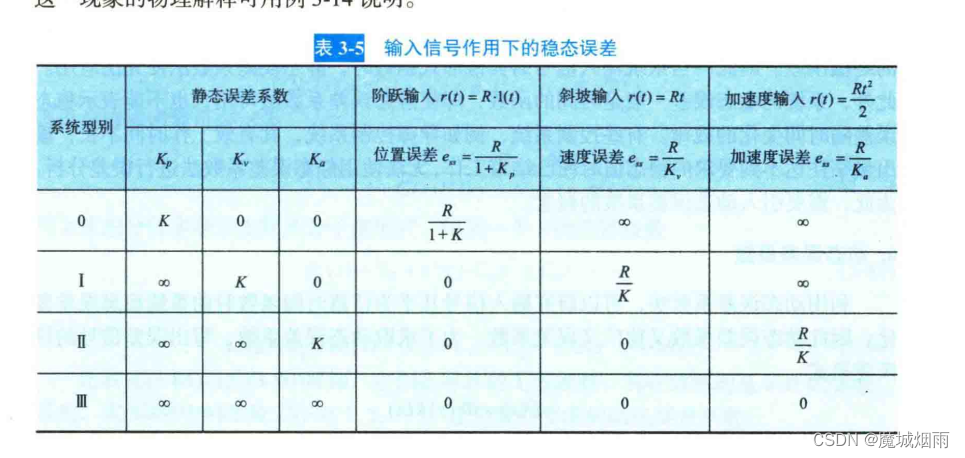
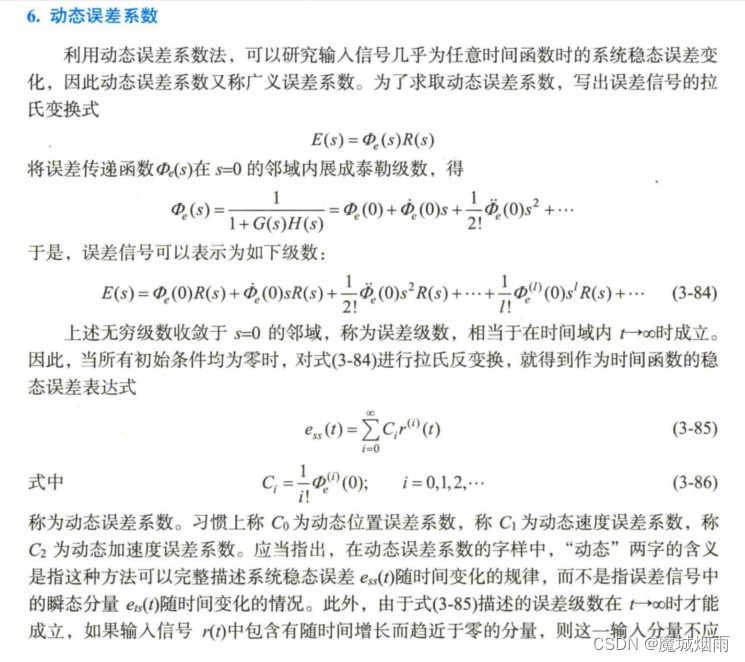
目录 文章目录 目录摘要1.开环增益与根轨迹增益2.欠阻尼二阶系统的性能3.系统的类型1.误差与稳态误差2.“系统型别”3.动态误差系数 摘要 本节主要记录自动控制原理中的系统型别的类型分类。 1.开环增益与根轨迹增益 所谓的开环增益就是系统的开环传递函数按照上面公式化简成尾1型,如下面函数: 因此开环增益就是3 2.欠阻尼二阶系统的性能 3.系统的类型 1.误差与稳态误差 2.“系统型别” 得到重要结论:这个非常有用 3.动态误差系数




























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








