







 本文介绍了卡尔曼滤波器的基本原理和应用,包括应用前提、算法详细步骤。卡尔曼滤波是一种融合预测和测量的估计方法,适用于线性高斯系统。文章通过实例展示了如何使用卡尔曼滤波来估计房间的实时温度,即使在测量噪声较大的情况下,也能得到准确的估计值。
本文介绍了卡尔曼滤波器的基本原理和应用,包括应用前提、算法详细步骤。卡尔曼滤波是一种融合预测和测量的估计方法,适用于线性高斯系统。文章通过实例展示了如何使用卡尔曼滤波来估计房间的实时温度,即使在测量噪声较大的情况下,也能得到准确的估计值。
卡尔曼滤波器的原理及应用
最近在学习Probablistic Robotics这本书,获益良多。以前学了概率论和随机过程之后一直觉得这些是虚的,不知道在工程上怎么用,而这本书恰恰就是讲如何把这些概率理论和方差估计应用到工程上去,更确切的说,应用到机器人上去。
- 应用前提
- 算法详细介绍
- 应用举例
- 下一步
1.应用前提
要应用kalman Filter,首先要有三个前提假设:
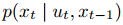
当前状态的概率分布必须是上一状态和将要执行的控制量的线性函数,再叠加一个高斯噪声。表达式如下:
其中和
是状态变量,如果系统有多个自由度的话,它们表示状态向量。这样的话根据高斯分布
可以得到状态转移概率
其中
表示上一状态的均值,
表示方差。
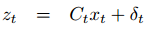
对状态的测量必须是状态的线性函数叠加高斯噪声
其含义与上类似,不再赘述。
初始状态分布为高斯分布





2.算法详细介绍
Kalman Filter五条黄金公式 :
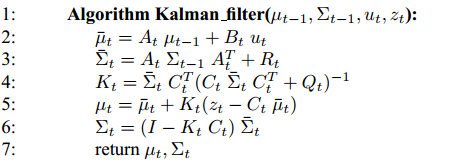
这五条公式基本上就是Kalman Filter的主要内容了, 它的本质就是通过预测结合测量来估计当前系统的状态。举个lizi,假如我们要估计一架飞行器的姿态&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









