







 本文介绍了如何使用ROS进行位置反馈控制机器人,通过Odometry消息获取机器人的位置信息,实现闭环控制,确保机器人能更准确地到达目标点。文章详细讲解了启动机器人、源码分析及后续步骤。
本文介绍了如何使用ROS进行位置反馈控制机器人,通过Odometry消息获取机器人的位置信息,实现闭环控制,确保机器人能更准确地到达目标点。文章详细讲解了启动机器人、源码分析及后续步骤。
ROS 位置反馈控制机器人
上一篇中我们学习了如何发布Twist消息控制机器人运动特定距离,但是上一篇用的是基于延时的开环控制,并没有引入反馈,在实际情况中几乎不可能准确到达目标点。所以这一篇我们学习如何用位置反馈闭环控制机器人。
- 启动机器人
- 从终端发布Twist消息控制机器人
- 下一步
1.启动机器人
ROS中提供了了一个Odometry消息类型可以得到机器人的位置信息。先看一下该消息的具体内容
rosmsg show nav_msgs/Odometry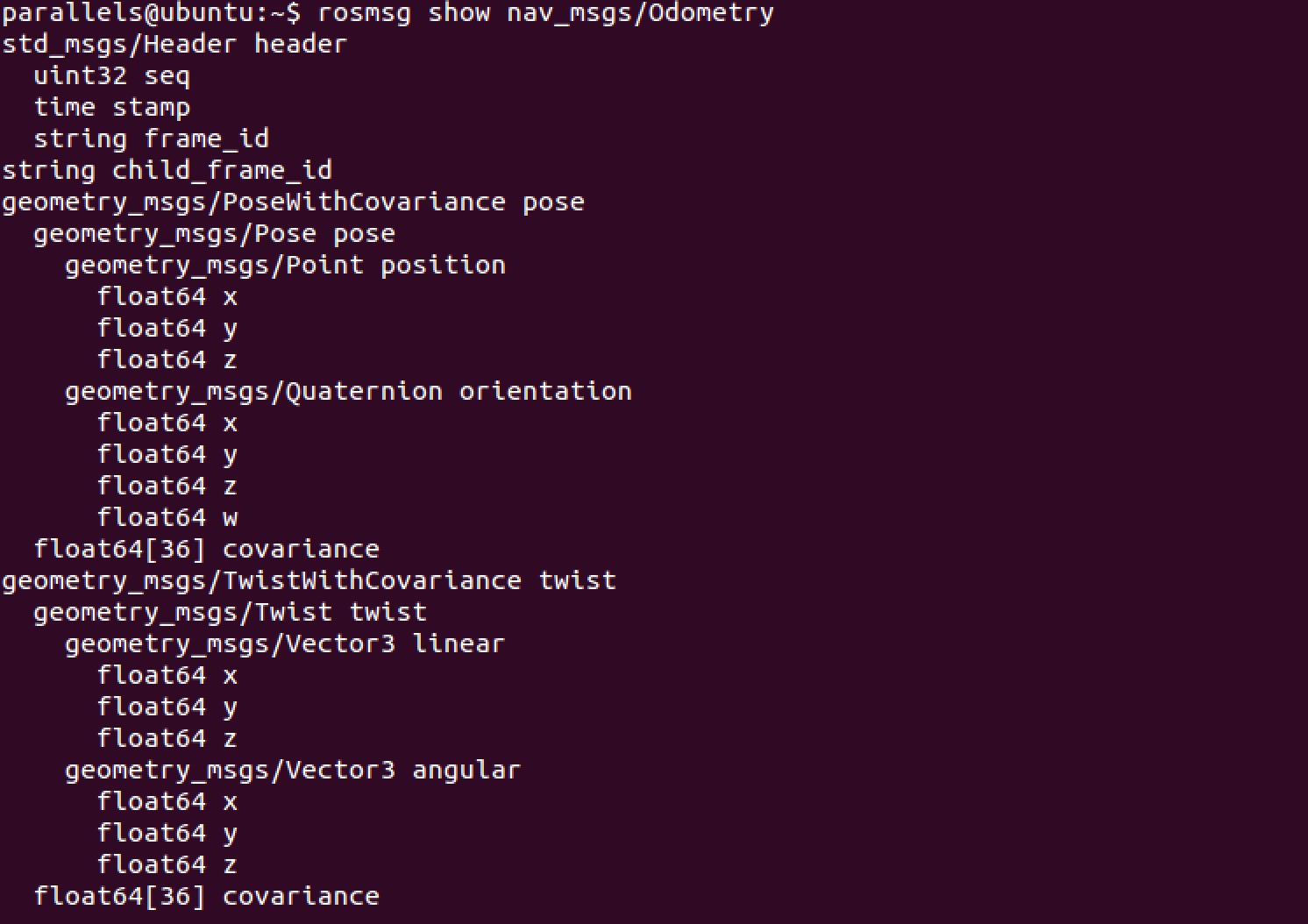
可以看出Odometry中包含pose:三轴位置信息,三轴欧拉角(用四元数表示),Twist:三轴线速度,三轴角速度。这两个消息中都包含了与测量不确定度有关的方差信息,可以很方便地用来卡尔曼滤波。
先启动机器人:
roslaunch rbx1_bringup fake_turtlebot.launchrosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz然后启动odom_out_and_back.py:
rosrun rbx1_nav odom_out_and_back.py结果如下:
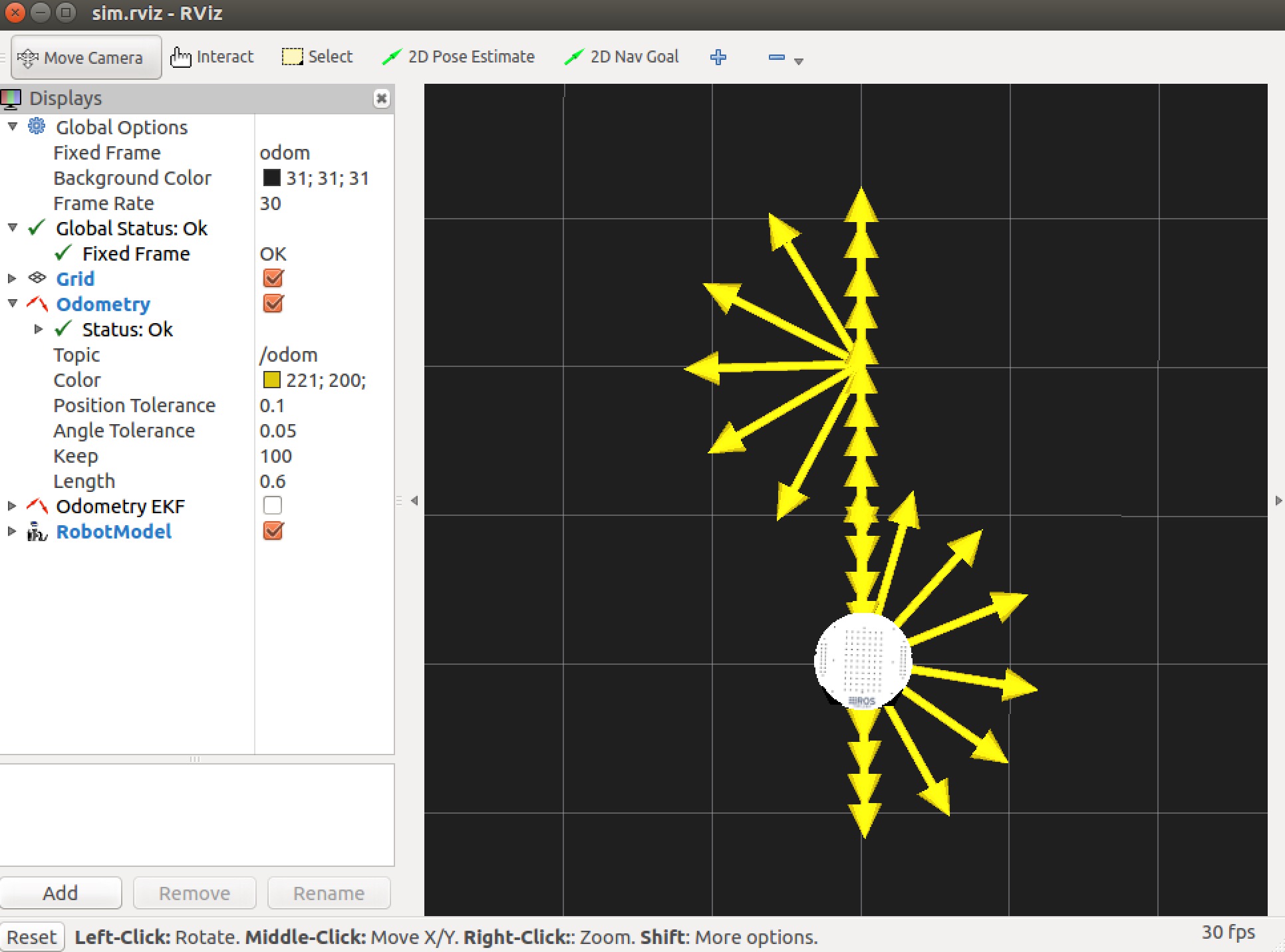
和开环效果是一样的,因为这里是模拟的理想情况。
2.源码分析
import rospy
from geometry_msgs.msg import Twist, Point, Quaternion
import tf
from rbx1_nav.transform_utils import quat_to_angle, normalize_angle
from math import radians, copysign, sqrt, pow, pi
class  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 699
699

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









