







扩展卡尔曼滤波器的原理及应用
经典的卡尔曼滤波只适用于线性且满足高斯分布的系统,但实际工程中并不是这么简单,比如飞行器在水平运动时有可能伴随着自身的自旋,此时的系统并不是线性的,这时就需要应用扩展卡尔曼滤波(EKF)来解决这种情况
- 应用前提
- EKF算法详细介绍
- 应用举例
- 下一步
1.应用前提
与kalman Filter只能应用于线性系统不同,Extended Kalman Filter 可以用于非线性系统中。:
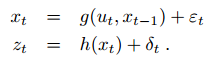
当前状态的概率分布是关于上一状态和将要执行的控制量的二元函数,再叠加一个高斯噪声,测量值同样是关于当前状态的函数叠加高斯噪声。具体表达式如下:
和
可以是非线性的函数。
为了用经典卡尔曼滤波器的思想来解决非线性系统中的状态估计问题,首先要做的就是把
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 575
575

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









