







本文介绍了在计算机图形学和航空航天领域中,pitch(俯仰)、yaw(偏航)和roll(翻滚)
这三个描述物体三维空间旋转的关键术语,分别对应绕横轴、垂直轴和纵轴的旋转角度。
-
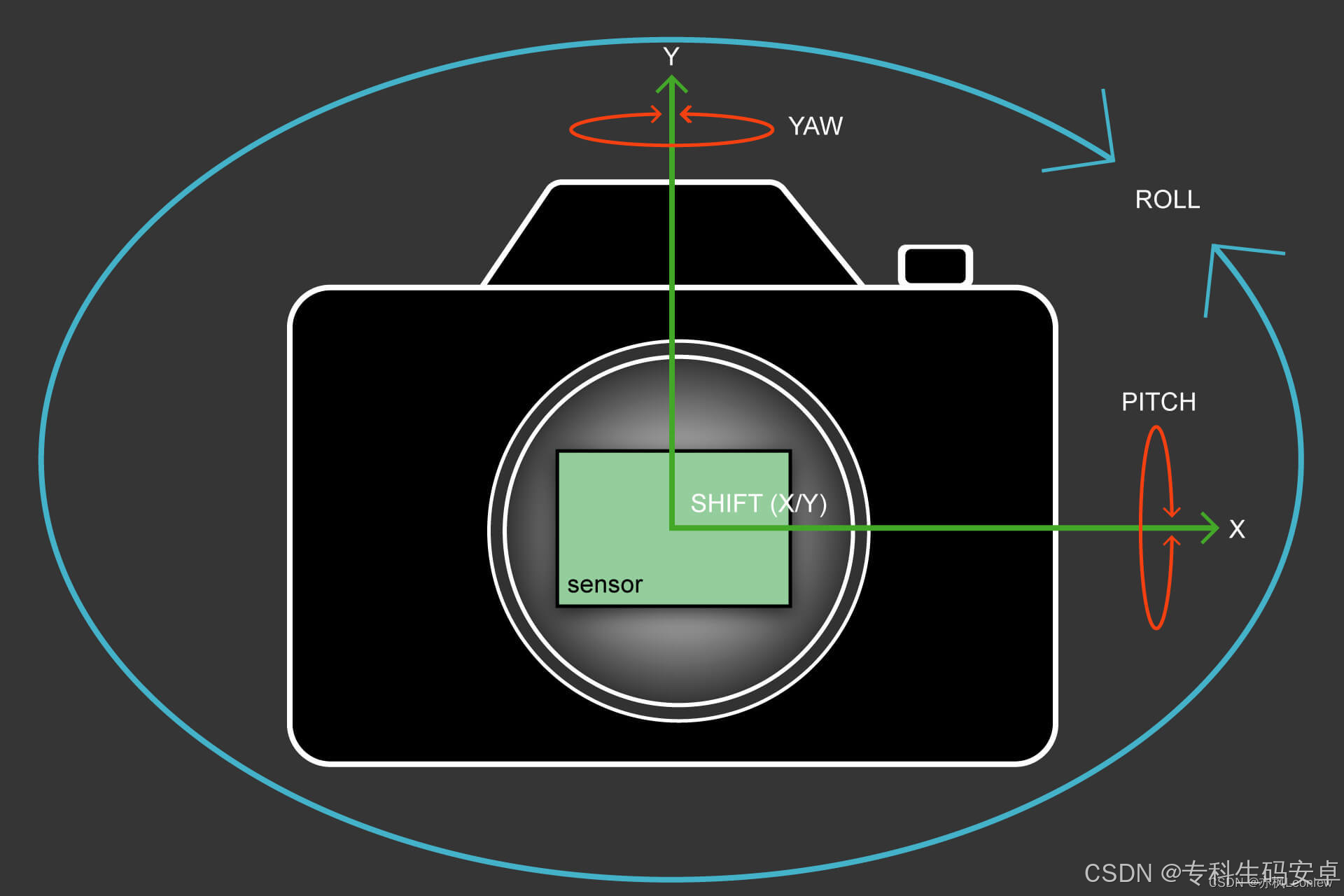
Pitch(俯仰):绕横轴旋转,使物体向前或向后倾斜。俯仰角度通常用来描述物体绕其横轴的旋转。
-
Yaw(偏航):绕垂直轴旋转,使物体左右转动。偏航角度通常用来描述物体绕其垂直轴的旋转。
-
Roll(翻滚):绕纵轴旋转,使物体沿水平面滚动。翻滚角度通常用来描述物体绕其纵轴的旋转。
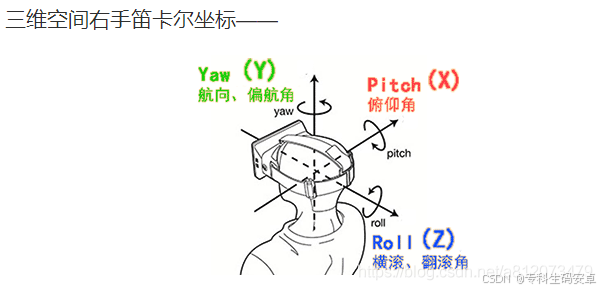
pitch是围绕X轴旋转,也叫做俯仰角
yaw是围绕Y轴旋转,也叫偏航角
roll是围绕Z轴旋转,也叫翻滚角
sensor dtsi
sensor-position-roll = <270>;
sensor-position-pitch = <0>;
sensor-position-yaw = <180>;
sensor module xml
<!--Maximum Roll Degree. Valid values are: 0, 90, 180, 270, 360 -->
<maxRollDegree>270</maxRollDegree>
<!--Maximum Pitch Degree. Valid values are: 0 to 359 -->
<maxPitchDegree>360</maxPitchDegree>
<!--Maximum Yaw Degree. Valid values are: 0 to 359 -->
<maxYawDegree>360</maxYawDegree>
xml如果是360就是不生效使用dtsi里面的,如果在 0 to 359内就是会使用xml里面的。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









