






前言:
首先很荣幸加入地瓜创客孵化营。我入手的是8GB版本的RDKX5,外观如下图1所示。
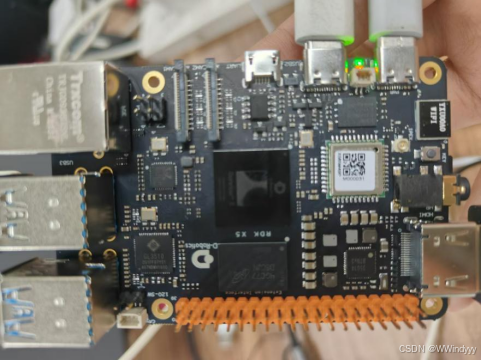
图1 RDK外观
拿到手打开的第一感受就是比树莓派精致很多,很漂亮,具体如下所示。和其他不同的是,中间有一个type-C的闪联接口,这样,开发方便就很多。同时,这也是我第一次用到RDK的开发板,我最大的感受就是方便快捷很多。首先,他的生态很完善,从RDK studio到官网上面的Node Hub 基本上不会出现出现问题找不到解决方案的情况。并且部署模型也很灵活,可以直接采用RDK自己的接口,总之,真的很方便。话不多说下面就是我的拿到板子到博客发布进行的一些测试和使用过程。
RDK X5使用注意事项:
1. 使用官方要求的电源:一定要按照官方要求使用RDK X5自带的电源进行上电,避免使用电脑的USB接口来供电。电脑供电可能无法提供足够的电流,导致板子无法正常工作。
2. 散热问题:RDK X5工作的功率还是很大的,工作时板子比较热。有条件的话建议使用外接散热片和风扇,避免不必要的情况发生。
RDK X5环境的烧录:
准备:
3. RDK X5
4. 数据线
5. SD卡
6. 电源
7. 视频采集卡和键鼠
8. 软件 Win32DiskImager.exe
环境烧录:

1. 按照图1的顺序①选择相应镜像②选择设备③写入④等待
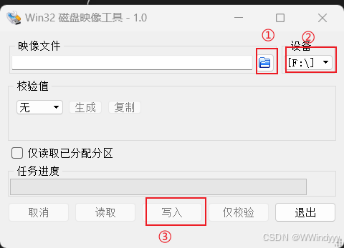
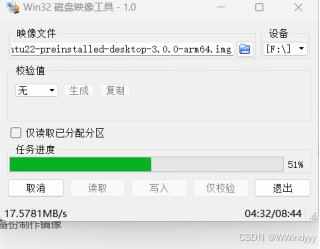
图2 镜像烧录
烧录完成如下所示
图3 镜像烧录完成
查看已经有的环境:
RDK X5 yolov8-pose 的部署
因为我自己的项目的需求,我准备向板子上面部署yolov8-pose模型,模型的训练参考CSDN上面的博客:YOLOv8-Pose推理详解及部署实现-CSDN博客
我一开始直接部署了模型,没有加速直接部署的.pt模型到板卡上面,也是直接用的CUP,这就导致了模型的推理速度很慢视频流也很卡,如下所示.

图4 推理速度
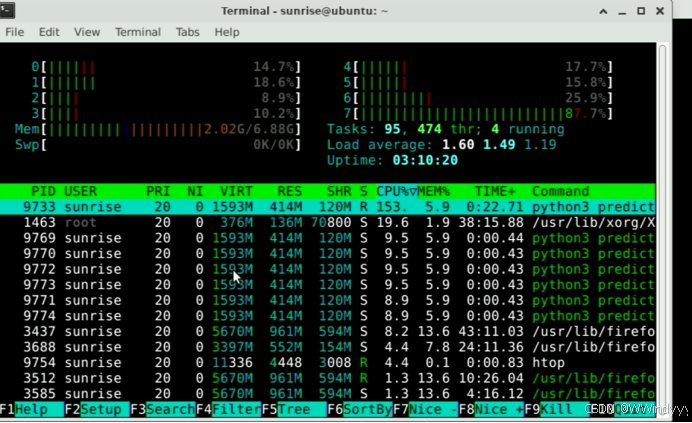
图5 资源占用情况
别说识别了,就是视频流也是很长时间才会更新一帧。
因为我算是深度学习的一个小白,对深度学习的了解也很浅显,所以就去论坛和CSDN上面找了一些博客,然后我在社群里面看了一些别人部署的例子,我发现大家都是部署的X5自己转换过的bin模型。即用旭日X5自己的D-Robotics 算法工具链完成模型的转化和部署。了解到RDKX5有自己的量化的工具下面是官网的介绍:D-Robotics 算法工具链是基于D-Robotics 处理器研发的算法解决方案,可以帮助您把浮点模型量化为定点模型, 并在D-Robotics 处理器上快速部署自研算法模型。
下面是我进行的一部分操作
1. 安装ONNX相关的Python库: pip install onnxruntime pip install onnx
2. 安装配置docker环境,但是不知道为什么,我的docker配置的有问题,启动不了,今天打算再用官网的教程走一遍。
再然后就是根据资料库里面的流程走。
总结
现在来说一下我使用下来的整体感受。一就是开头说到的生态的完善。特别是官网提供了大量的教程和资料很适合新手去实操上手。虽然作为新手还是遇到了一些困难,但是社群里的东西真的帮助了我很多。接下来,继续探索RDK X5的更多功能吧!!!加油!!!

















 4185
4185

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









