







 超级会员免费看
超级会员免费看
1.模块介绍
PinwheelConv(风车状卷积)充分利用了IRST(红外搜索与跟踪)中的高斯分布特性,以极少的参数实现了高效且更大感受野的特性。此外,本文还提出了一种简单而高效的 SD 损失函数,有效缓解了标签 IoU 变化带来的不稳定性。通过与现有卷积模块和损失函数的广泛对比,所提出的方法在准确性和鲁棒性方面始终优于最先进的方法,展现出卓越的性能和广泛的应用潜力。
2.改进后的结构图
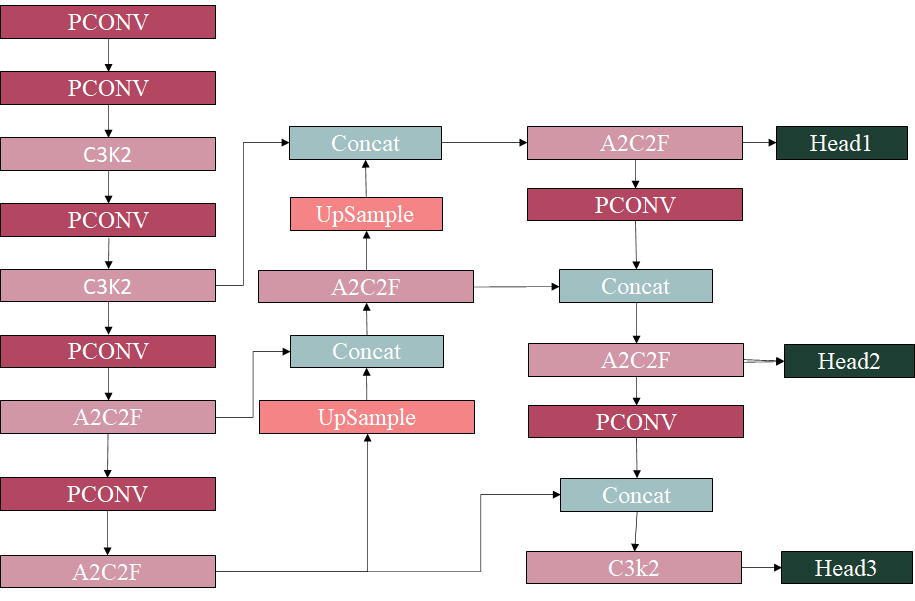
3.将PConv融合进YOLOv12
首先找到ultralytics下面的Conv文件夹新建PConv.py把下面代码写入:
import torch
import torch.nn as nn
import torch.nn.functional as F
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k - 1) + 1 if
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1452
1452

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









