






实时分享CVPR、ECCV等会议,关注深度学习、自动驾驶领域,我们期待你的加入。点击上方“CNNer”,选择加“星标”或“置顶”精选干货,当日达。

获取2020年最新论文动态,请加微信:

回复:“人工智能教程”
免费获取整理的python、pytorch、tensorflow等视频学习资源。
自动驾驶开源数据集年份汇总:
续前文:2020年| 最新自动驾驶数据集汇总,持续更新(1)
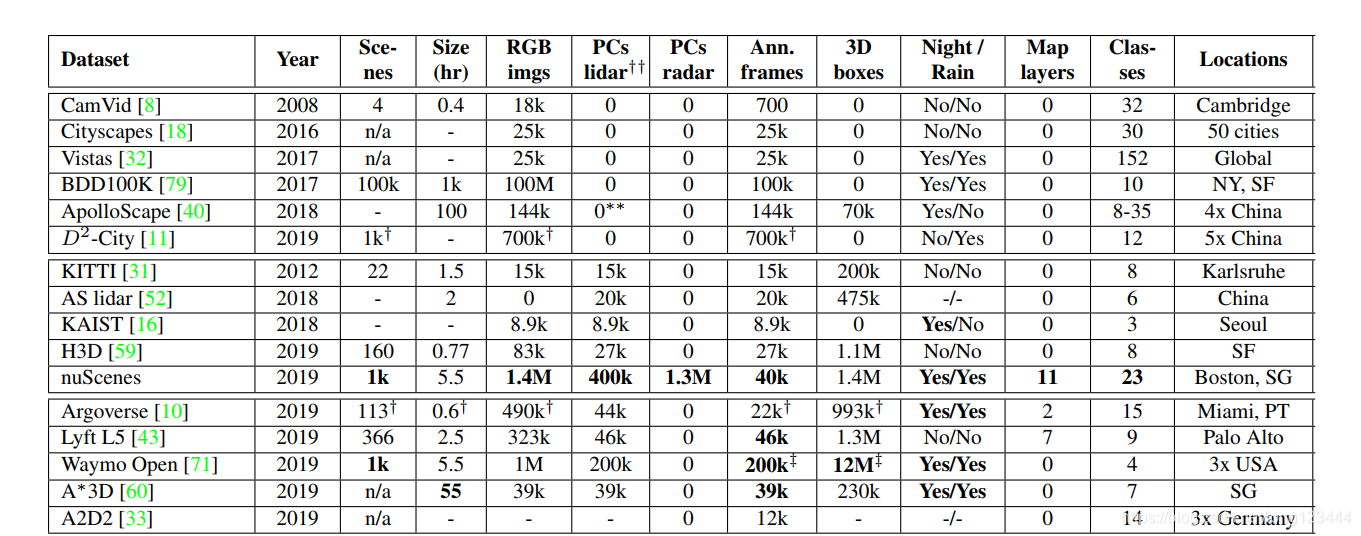
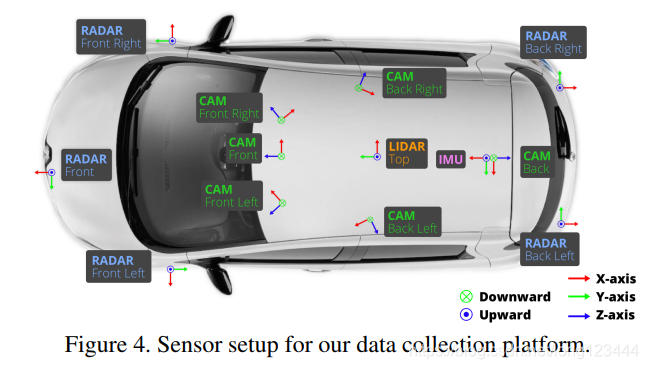
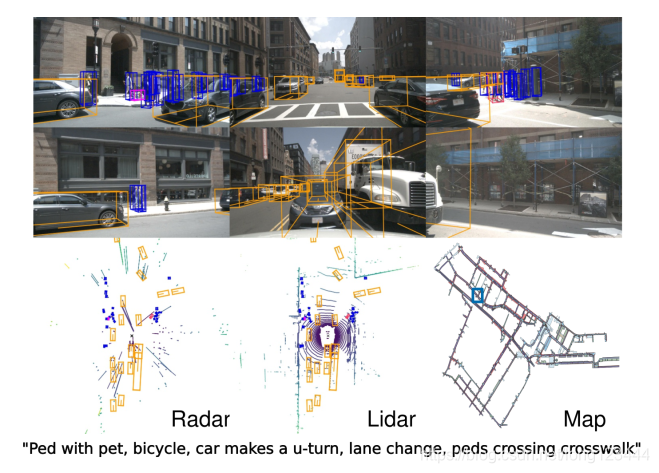
6、Nuscenes自动驾驶数据集
论文网址:https://arxiv.org/abs/1903.11027
论文名称:nuScenes: A multimodal dataset for autonomous driving
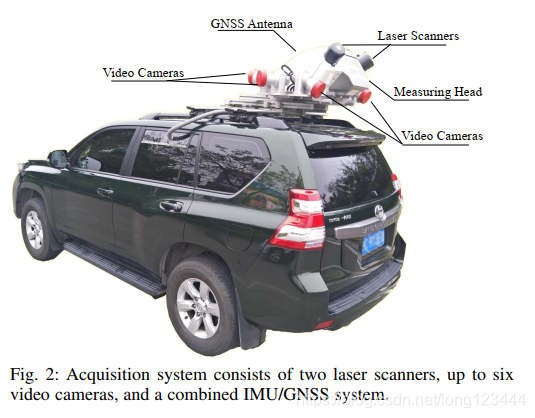
7、Apollo 开源自动驾驶数据集(baidu)
论文地址:https://arxiv.org/pdf/1803.06184.pdf
论文名称:The apolloscape open dataset for autonomous driving and its application
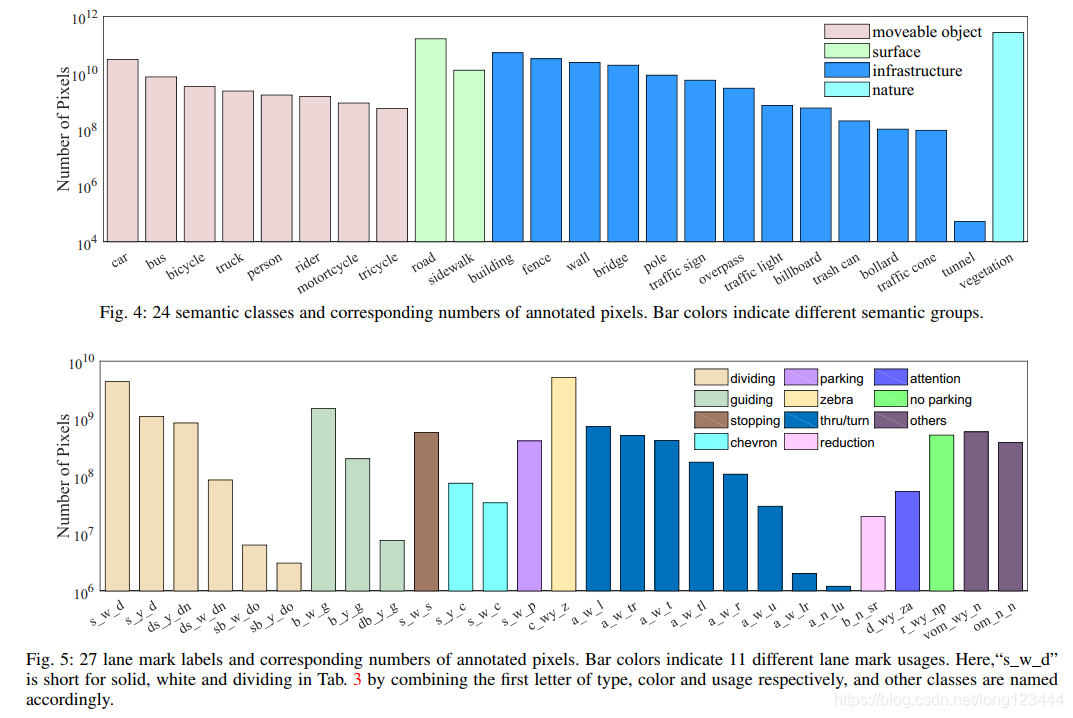
2018年3月,百度大规模自动驾驶数据集ApolloScape应需开放,致力于为全世界自动驾驶技术研究者提供更为实用的数据资源及评估标准。ApolloScape已经开放了14.7万帧的像素级语义标注图像,包括感知分类和路网数据等数十万帧逐像素语义分割标注的高分辨率图像数据,以及与其对应的逐像素语义标注,覆盖了来自三个城市的三个站点周围10KM的地域。主要包含三部分:仿真数据集、演示数据集、标注数据集:
(1)仿真数据集,包括自动驾驶虚拟场景和实际道路真实场景;
(2)演示数据集,包括车载系统演示数据,标定演示数据,端到端演示数据,自定位模块演示数据;
(3)标注数据集,包括6部分数据集:激光点云障碍物检测分类,红绿灯检测,Road Hackers,基于图像的障碍物检测分类,障碍物轨迹预测,场景解析;
8、Cityscapes 数据集
网址:https://www.cityscapes-dataset.com/
论文地址:https://arxiv.org/abs/1604.01685
论文名称:The Cityscapes Dataset for Semantic Urban Scene Understanding
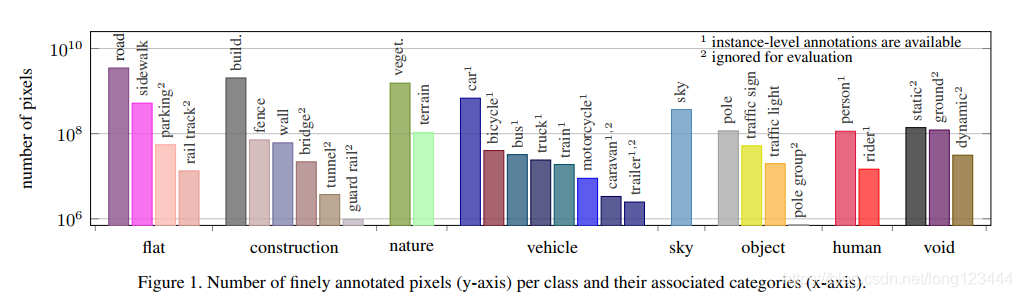
该大型数据集包含来自50个不同城市的街道场景中记录的多种立体视频序列,除了20000个弱注释帧以外,还包含5000帧高质量像素级注释。
9、Lyft 数据集
论文地址:https://level5.lyft.com/dataset/
论文名称:Lyft Level 5 AV Dataset 2019
除了超过55,000个人工标记的3D注释交通代理帧外,该数据集还包含来自七个摄像头和多达三个激光雷达传感器的比特流,以及一个可驱动的表面地图和一个包含超过4,000个车道段的基础HD空间语义地图,197人行横道,60个停车标志,54个停车区,8个减速带和11个减速带。Lyft称,demo是从一个有限的地理区域的福特Fusion自动驾驶汽车车队收集的。他们每个人都配备了一个40光束的屋顶激光雷达和40光束保险杠激光雷达,宽视场相机,以及一个可以检测交通灯的长焦距摄像头。
10、BDD100K数据集(伯克利DeepDrive联盟)
网址:https://bdd-data.berkeley.edu/
论文地址:https://arxiv.org/abs/1805.04687
论文名称:BDD100K: A Diverse Driving Dataset for Heterogeneous Multitask Learning
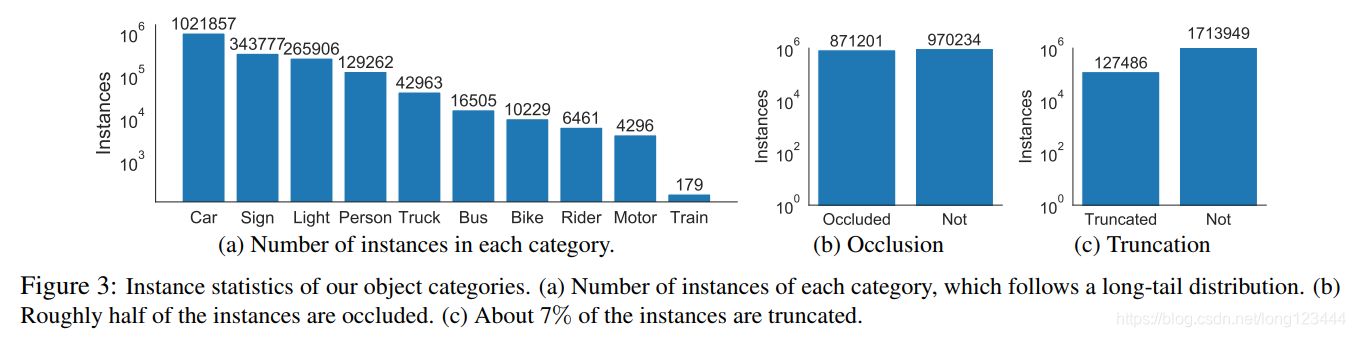
伯克利大学AI实验室(BAIR)发布了目前最大规模、内容最具多样性的公开驾驶数据集BDD100K,同时设计了一个图片标注系统(Labeling System 的介绍见论文)。BDD100K 数据集包含10万段高清视频,每个视频约40秒,720p,30 fps 。每个视频的第10秒对关键帧进行采样,得到10万张图片(图片尺寸:1280 * 720 ),并进行标注。















 1081
1081











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









