







SimpleFOC的教程比较多,做了一个总的链接,欢迎点击阅读:SimpleFOC教程链接汇总
提供前四节的代码,欢迎下载:
链接:https://pan.baidu.com/s/1j9pDH5OiaMipq-v6H9NDrQ
提取码:rdh7
说明
- 前面六节用STM32F103C8T6演示了电机的FOC控制,受制于单片机性能,电机所能达到的最大速度不超过1000RPM。本文采用STM32F405RGT6,单片机性能提高,电机最大转速可以达到3000RPM。
- 前四个代码开放,网盘链接在每一小节的开始位置。
- STM32F103C8T6和STM32F405RGT6,代码的应用部分基本相同,主要是底层驱动不同。
- 本文的每一小节对应前面的每一篇教程,本文只是把F405的操作过程演示了下,技术细节都在前面六篇文章中讲解过,不再赘述,建议您演示每一节的操作时看下前面对应的教程。


一、点亮LED
1.1、原理图
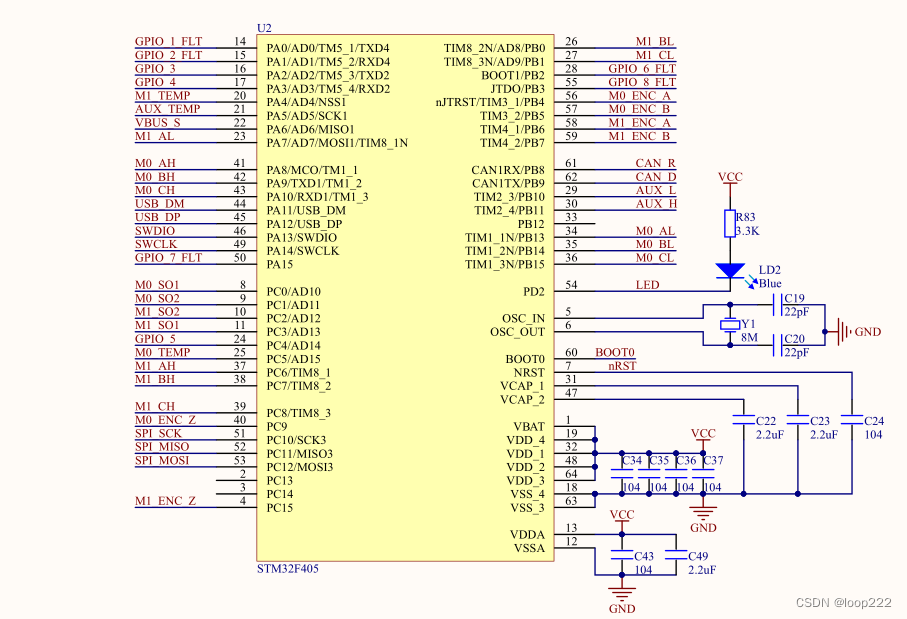
1.2、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | mODrive 驱动板 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |

注意:
1、ST-link跟单片机连接,建议只接三根线:SWDIO、SWCLK、GND。
2、如果驱动板接了外部供电,ST-link的3.3或者5V不要再跟单片机连接,
3、目前遇到的问题,有只接2根线不接GND,导致下载失败,
4、有接3.3V,导致ST-link和驱动板共电被烧坏,
5、如果是带隔离的ST-link,需要接3.3V,实现驱动板向ST-link下载接口供电的效果。
1.3、烧写
-
直接在keil中下载,

-
如果提示连接失败,请检查接线,或者拔掉ST-link重启一次。
-
使用ST-LINK Utility烧写


二、开环控制
你仍然可以阅读前面这篇文章,以获取更多详细的介绍,SimpleFOC移植STM32(二)—— 开环控制
开环控制的目的:
1、验证驱动板和电机没有问题,可以转动。
2、设置不同的voltage_limit参数,确保电机能够开环稳定转动(速度可设为T5或者T10),
这个最合适的值用于后面闭环控制的voltage_sensor_align。
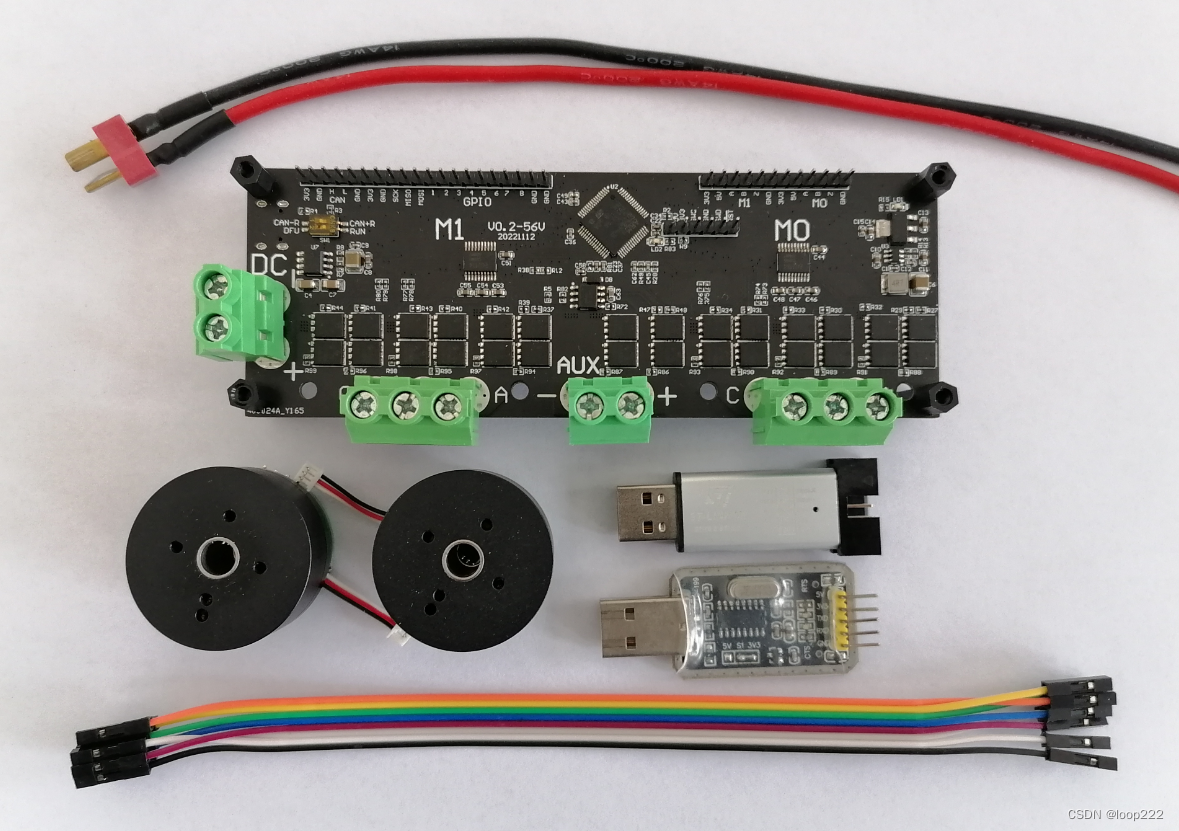
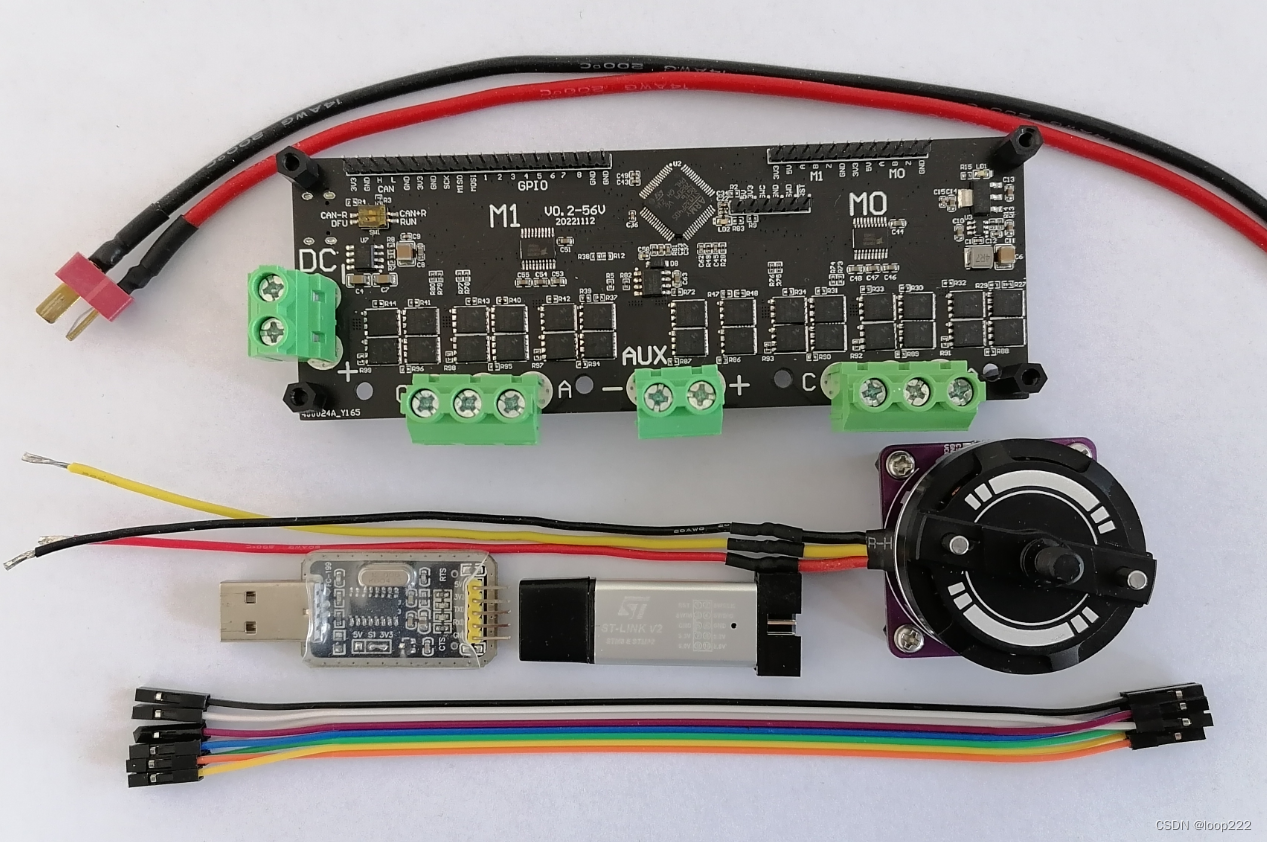
2.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | 驱动板405 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |
| 4 | USB转串口 | 1 |
| 5 | 2804云台电机 | 1 |
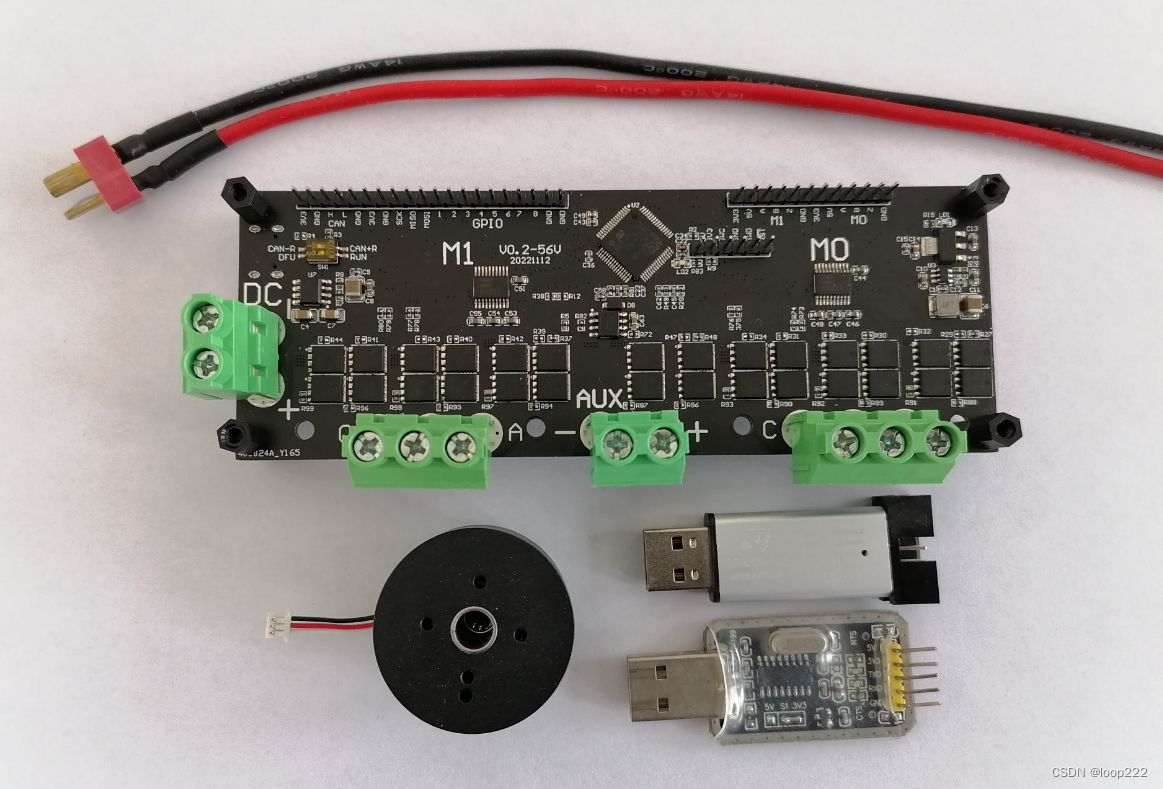
驱动板405 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
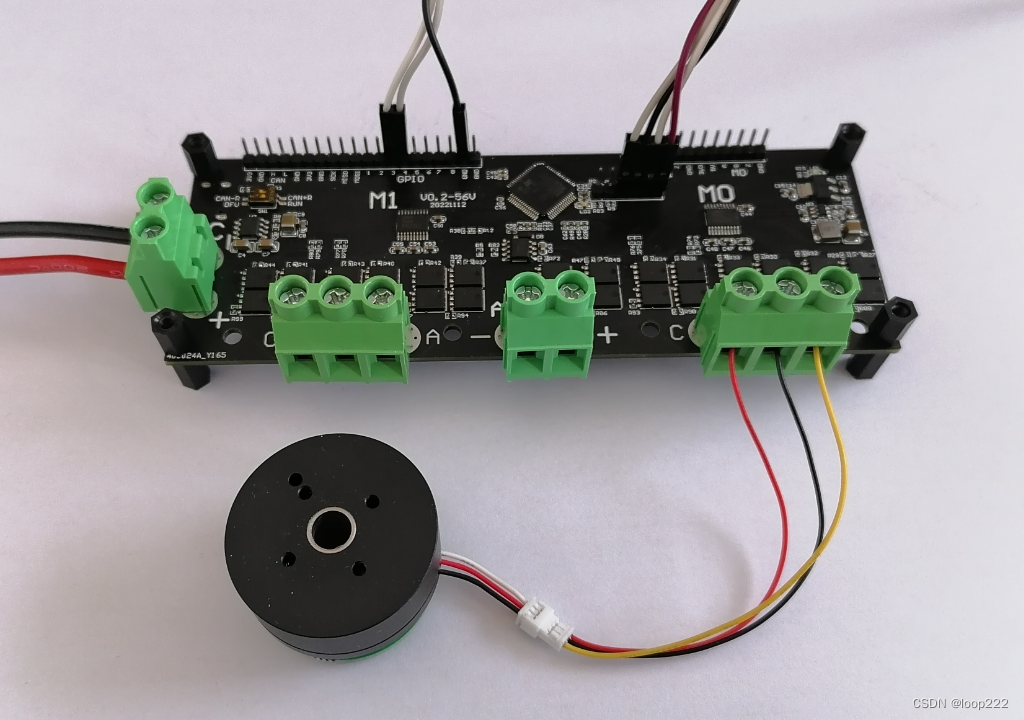
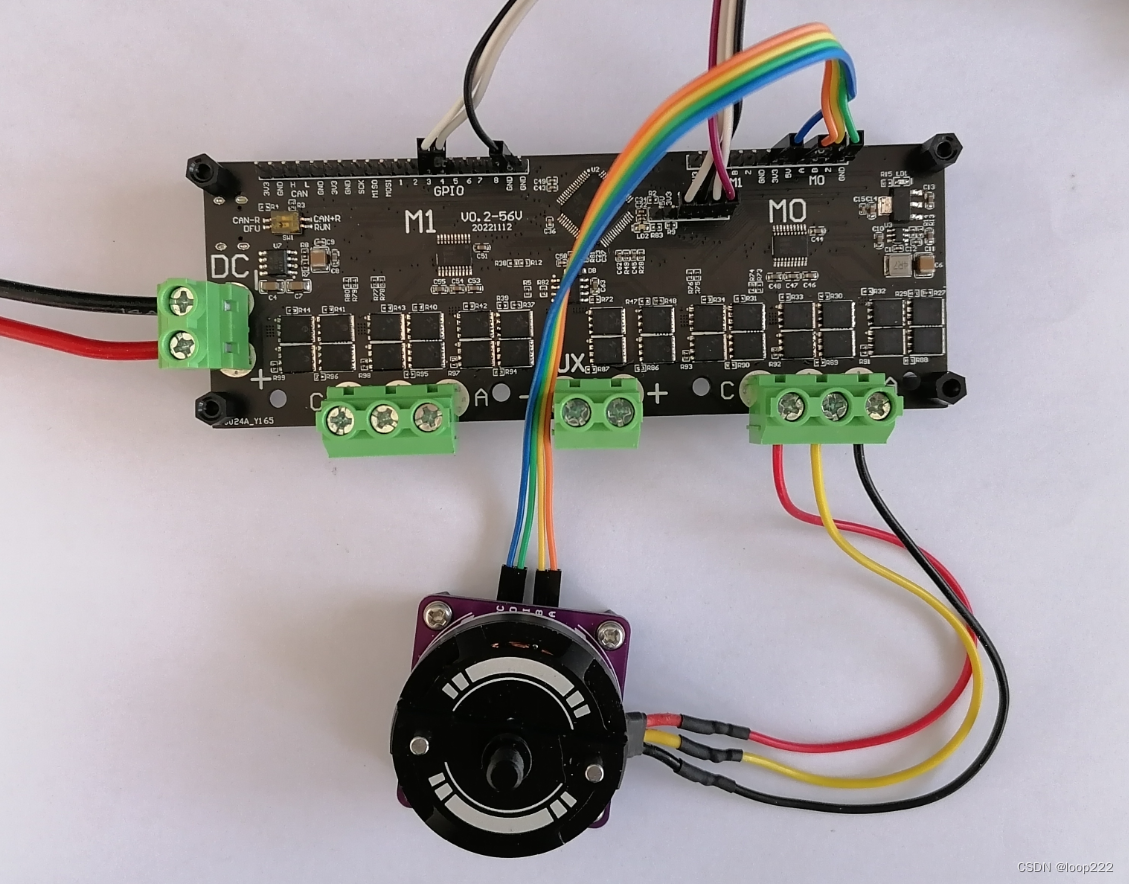
2.2、硬件连接
- 电机三根线随便接,不用区分相序,
- 代码中使用USART2与串口调试助手通信,也就是驱动板的GPIO 3为TXD2,4为RXD2,所以驱动板的GPIO3接串口的RXD,GPIO4接串口的TXD。
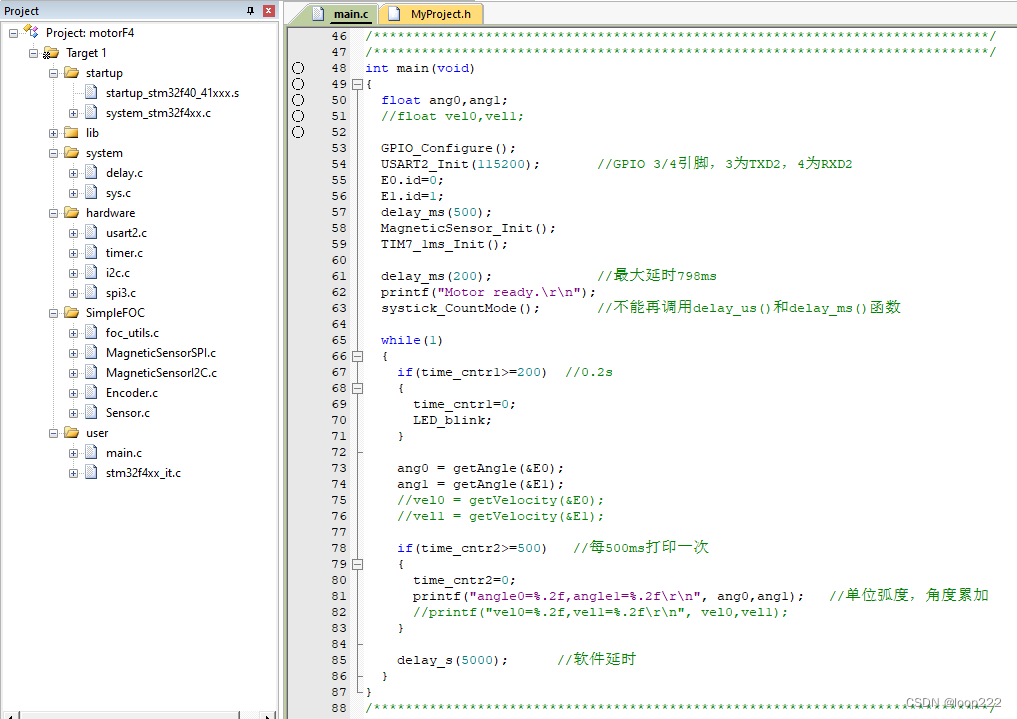
2.3、打开工程
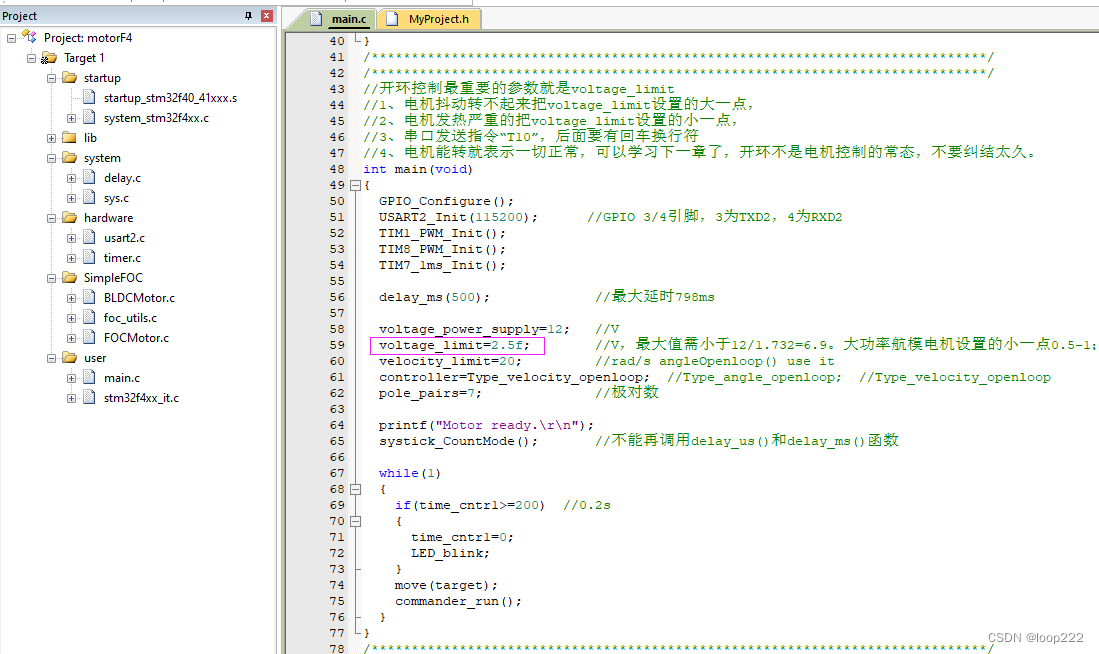
2.4、修改参数
- 开环控制中,最重要的参数就是voltage_limit,
- 电机抖动转不起来把voltage_limit设置的大一点,
- 电机发热严重的把voltage_limit设置的小一点,
- 串口发送指令,比如“T10”,后面别忘了回车换行符。
2.5、编译下载,观察运行
- 常用的串口调试软件,在发送区敲回车,对应的16进制数据为0D 0A,也就是回车换行;Arduino IDE自带的串口监视器,输入指令点发送,只有16进制的0A。所以不能用Arduino IDE的软件给当前代码发送指令。
- 发送指令,从低速开始逐渐增加,速度设置过快电机容易失步变成振动。速度单位为rad/s,6.28表示一圈每秒。

三、角度读取
你仍然可以阅读前面这篇文章,获得单独读某一个编码器的代码,SimpleFOC移植STM32(三)—— 角度读取
3.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | 驱动板405 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |
| 4 | USB转串口 | 1 |
| 5 | 带编码器云台电机 | 2 |
| 6 | 杜邦线 | 若干 |
驱动板405 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
3.2、硬件连接
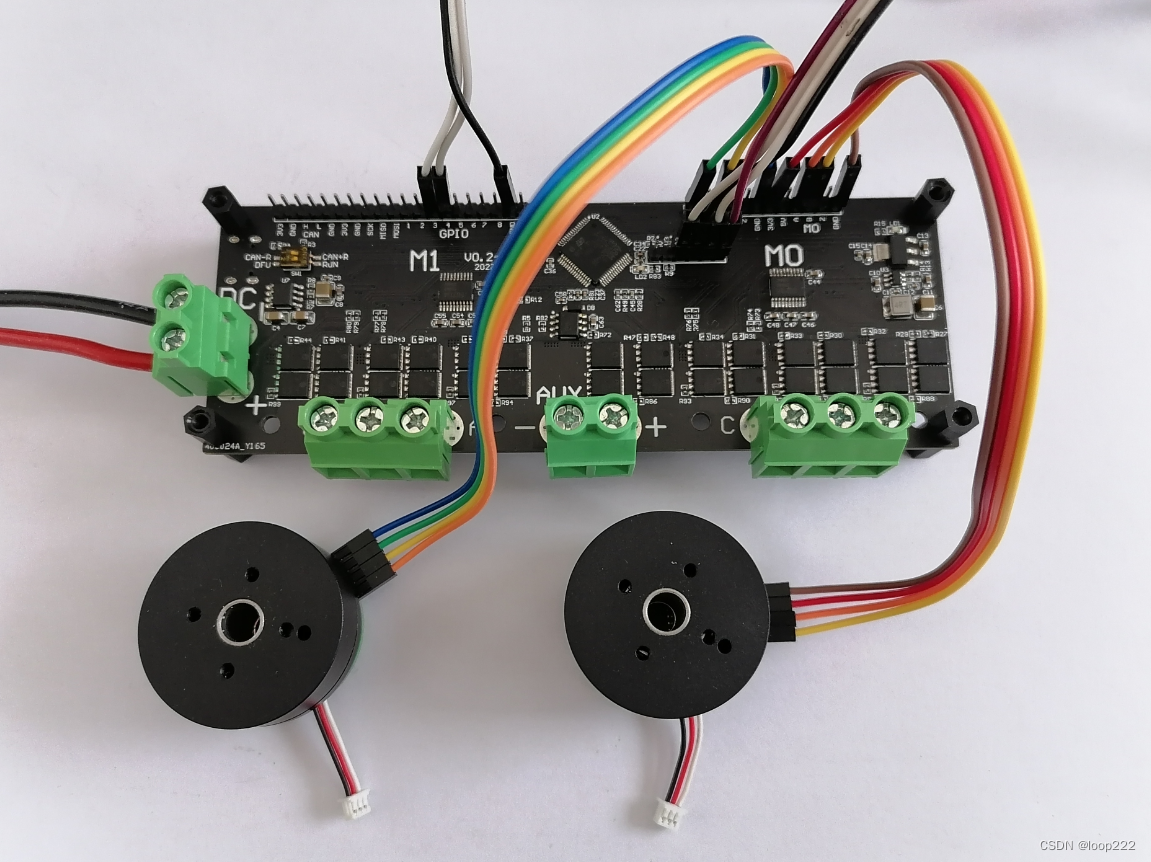
3.3、接线说明
- I2C接口用M0的A/B为SCL0/SDA0,M1的A/B为SCL1/SDA1,
- 如果是SPI接口的编码器,GPIO1为M0的CS,GPIO2为M1的CS,

3.4、打开工程
- 如果需要打印速度,可以把屏蔽打开。
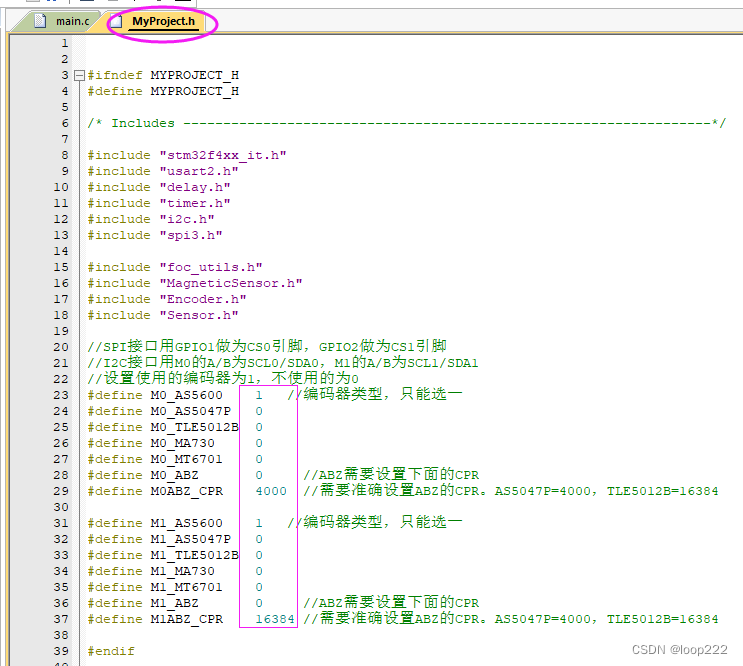
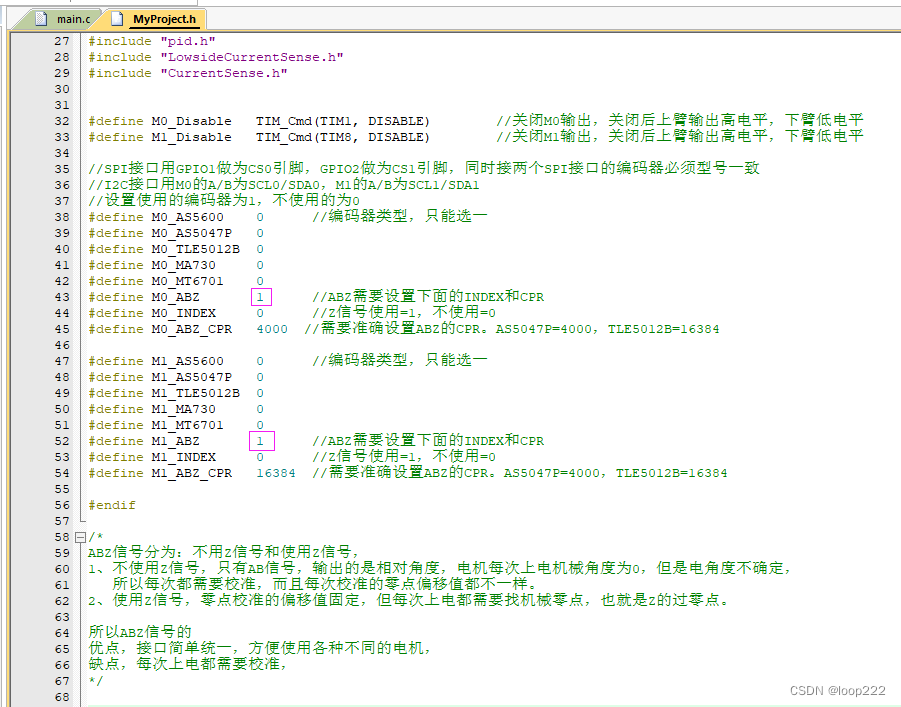
3.5、修改代码
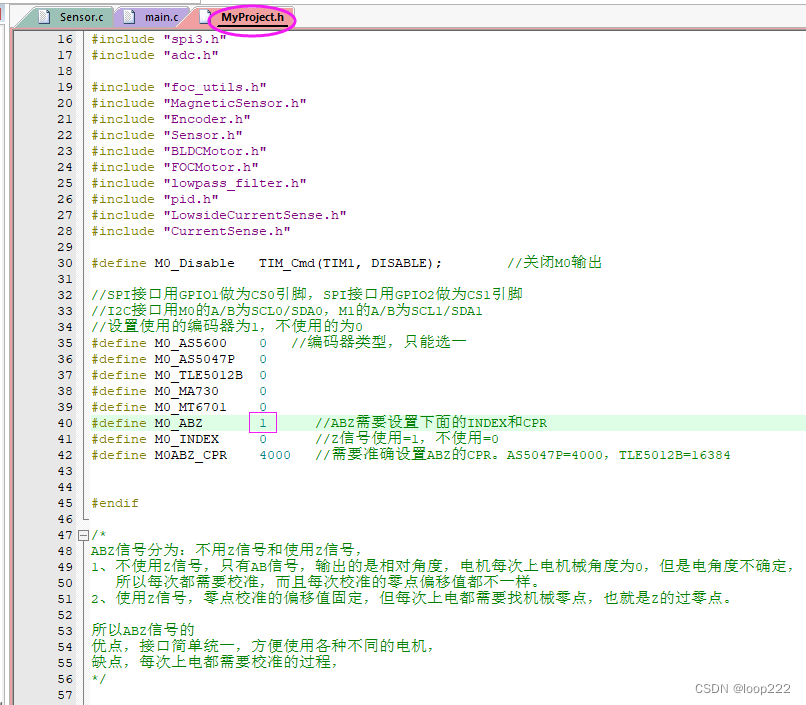
- “MyProject.h”文件中选择编码器型号,1表示使用,0表示不用。
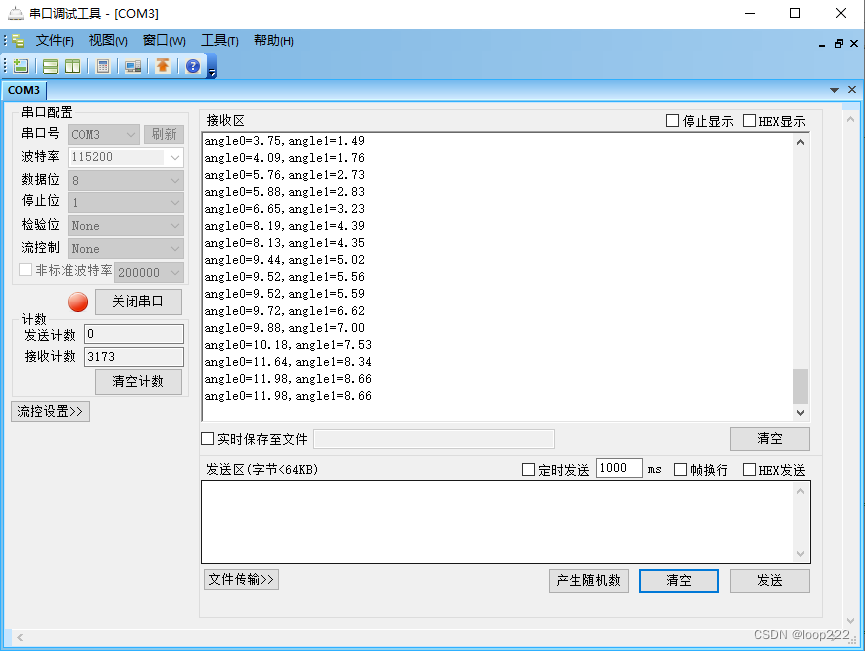
3.6、编译下载,观察运行
四、闭环控制
如果对闭环控制的概念不了解,可以先看这篇文章 SimpleFOC移植STM32(四)—— 闭环控制
前四代码下载:
链接:https://pan.baidu.com/s/1j9pDH5OiaMipq-v6H9NDrQ
提取码:rdh7
4.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | 驱动板405 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |
| 4 | USB转串口 | 1 |
| 5 | 带编码器航模电机 | 1 |
| 6 | 杜邦线 | 若干 |
驱动板405 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
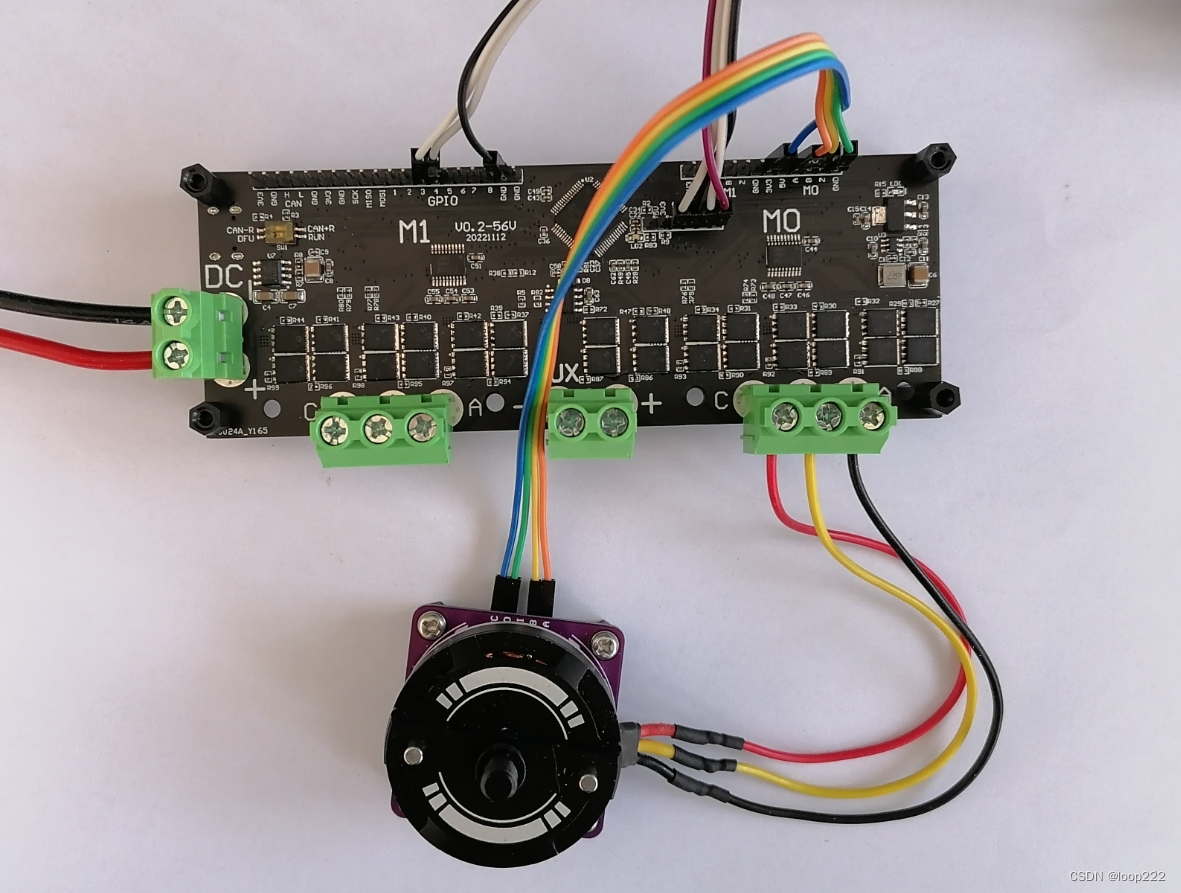
4.2、硬件连接
4.3、打开工程
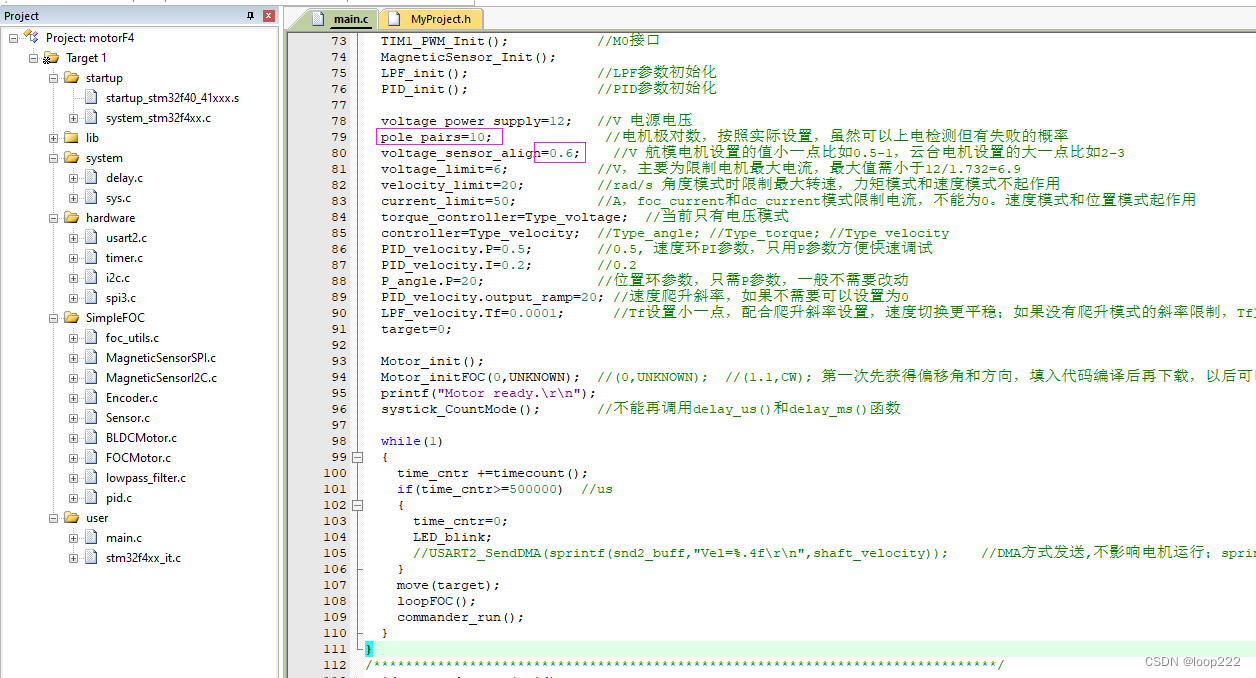
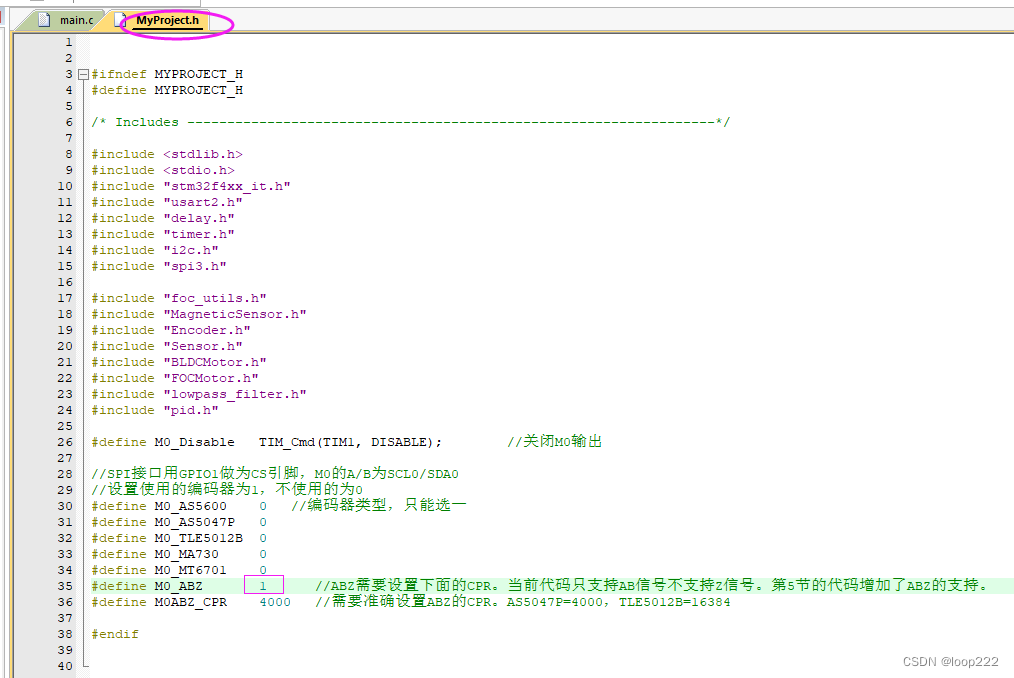
4.4、修改代码
- 修改电机极对数和零点校准电压。关于零点校准的说明,有疑问的请看 SimpleFOC移植STM32(四)—— 闭环控制。
- 选择编码器型号,本节中用AB信号,当前代码不支持Z信号,下一节会增加对Z信号的支持。
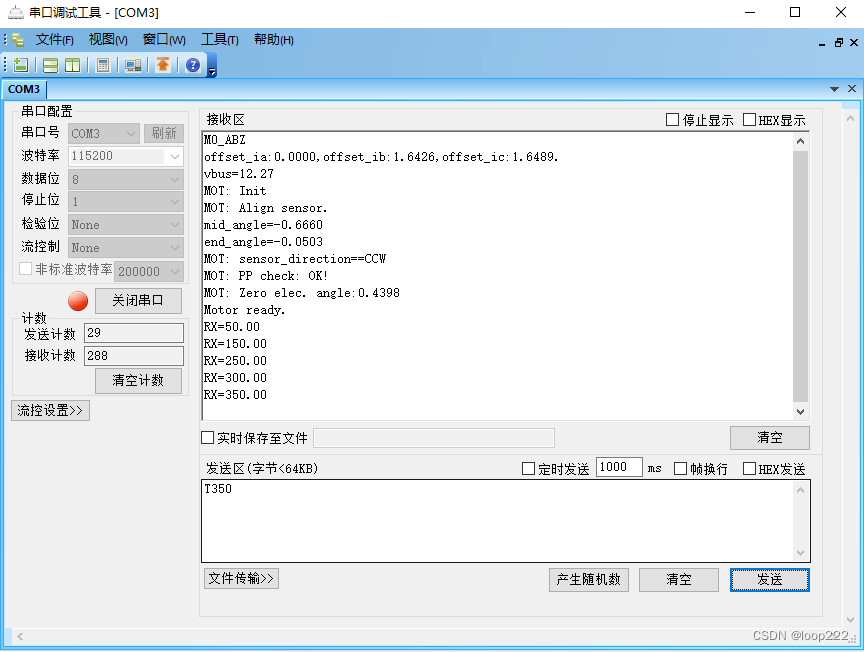
4.5、编译下载,观察运行
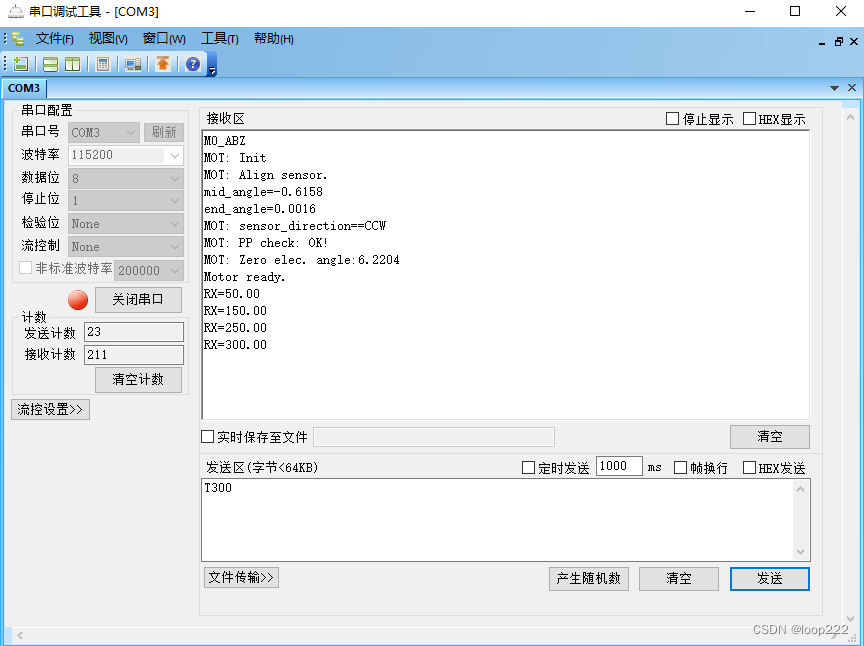
最大转速可以达到T300(300 rad/s = 47.8圈/s = 2866)。
五、电流采样
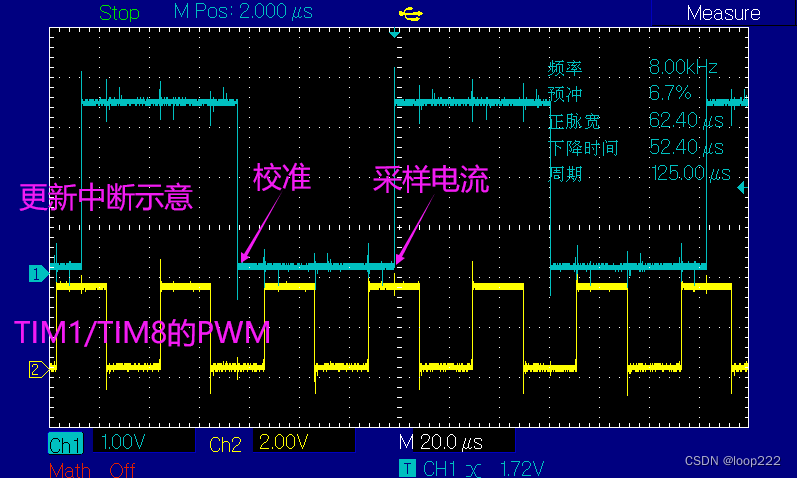
low-side模式,需要在PWM打开下臂MOS的时候采样,具体来说就是:
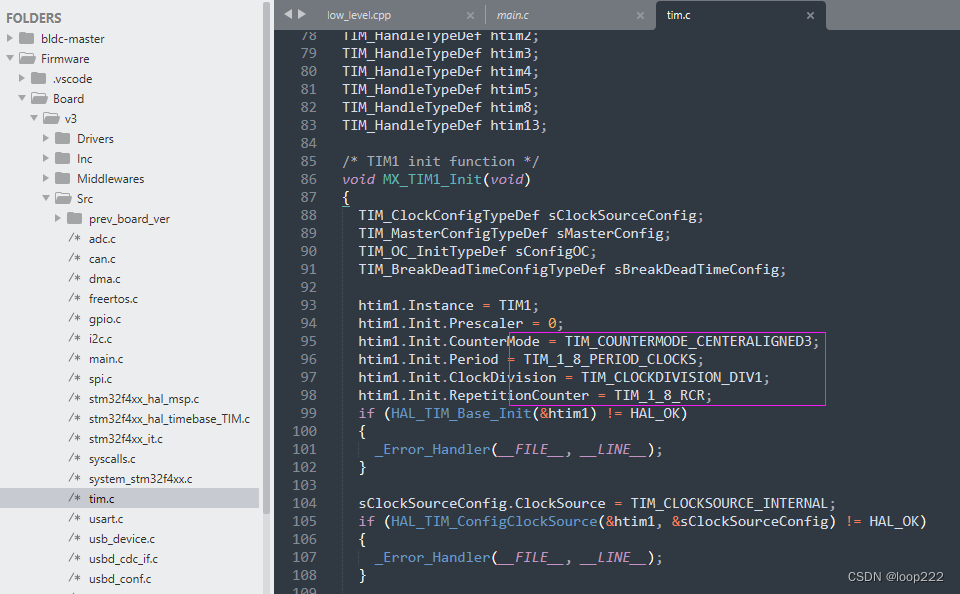
- 配置TIM1/TIM8为中央对齐模式,并把更新做为触发输出(TIM_TRGOSource_Update);
- ADC开 转换完成中断(ADC_IT_EOC 和 ADC_IT_JEOC),被PWM触发采样,采样完成进入中断,在中断中取出采样值;
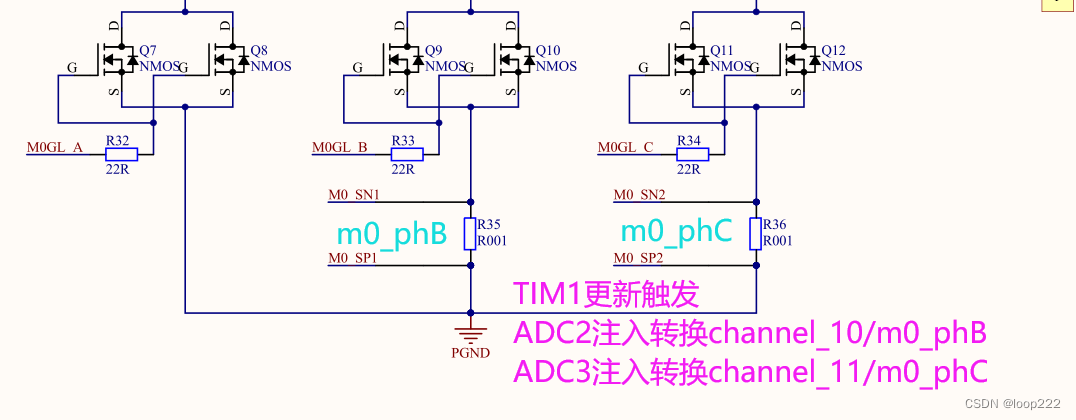
- 第1路电机M0,ADC2注入组采样m0_B相,ADC3注入组采样m0_C相,由TIM1触发,
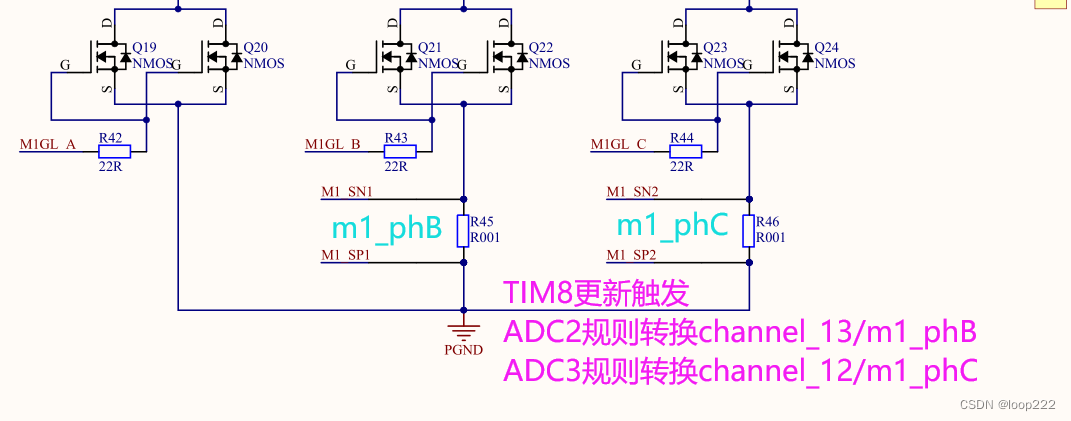
- 第2路电机M1,ADC2规则组采样m1_B相,ADC3规则组采样m1_C相,由TIM8触发。
更多电流采样的介绍,请阅读前面这篇文章,SimpleFOC移植STM32(五)—— 电流采样及其变换
本小节先介绍M0的电机控制。
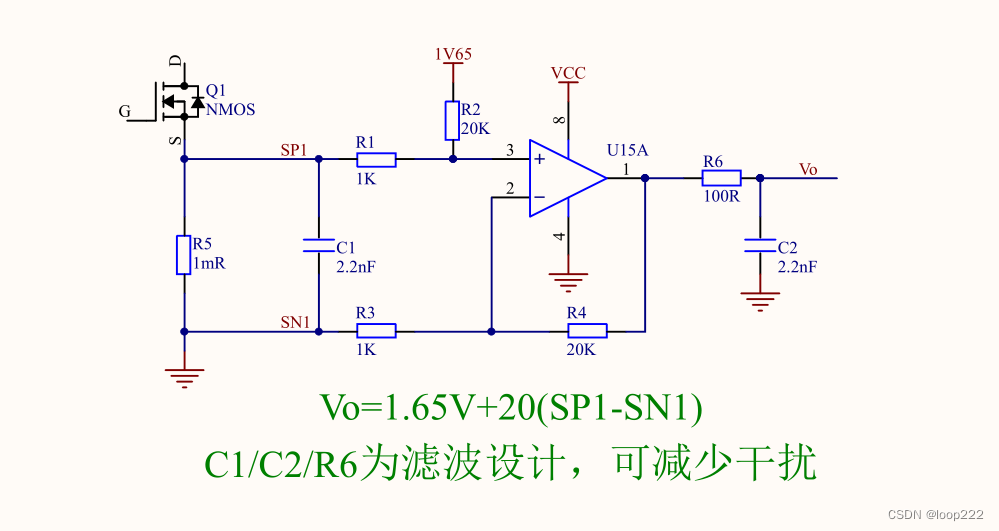
5.1、采样电路的设计
Low-side模式,电流采样电路的介绍,在 《SimpleFOC之ESP32(五)—— 电流闭环控制Lowside》 第1.3节有讲解,可对比阅读。
5.2、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | 驱动板405 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |
| 4 | USB转串口 | 1 |
| 5 | 带编码器航模电机 | 1 |
| 6 | 杜邦线 | 若干 |
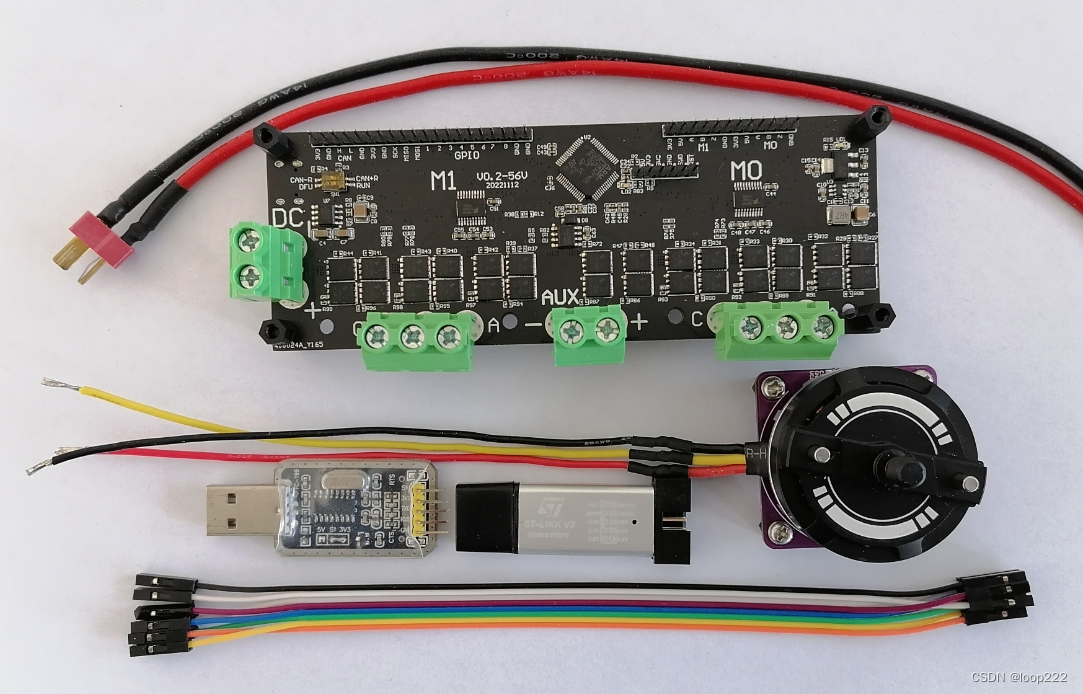
驱动板405 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
5.3、硬件连接
5.4、打开工程
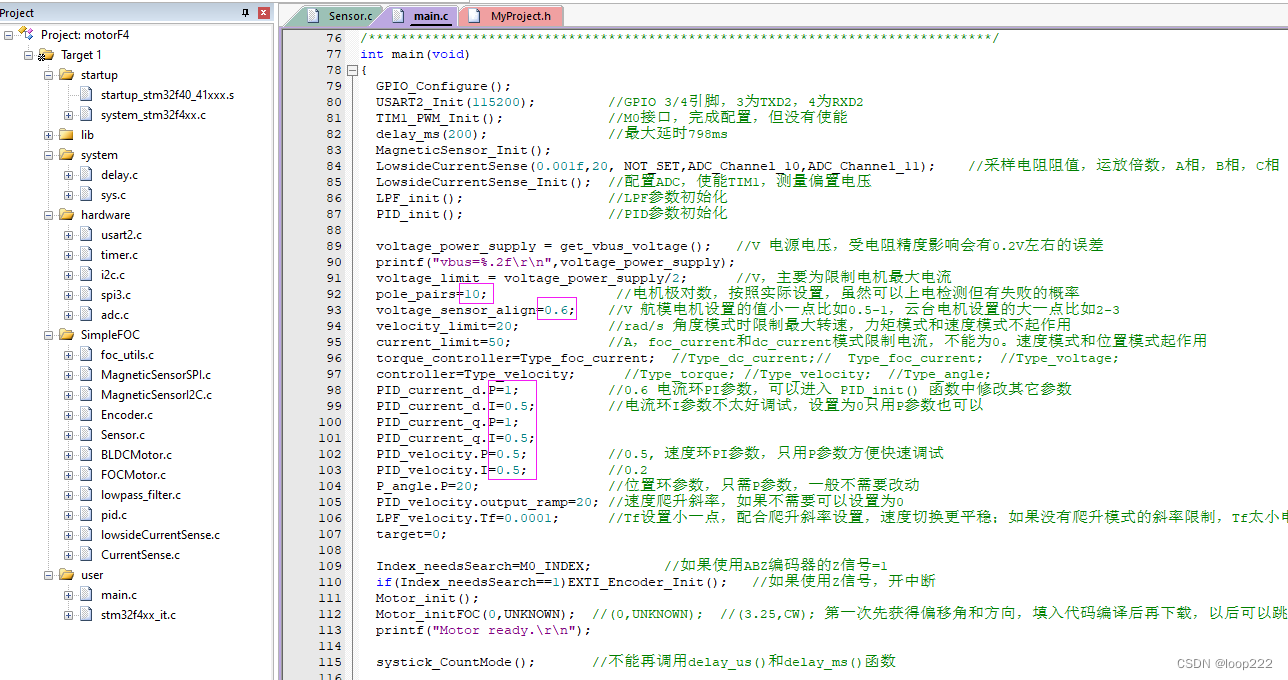
5.5、修改代码
- 极对数和voltage_sensor_align,根据实际使用电机确定,
- PID参数仅供 参考,非最佳参数,
- 编码器增加了对Z信号的支持,有详细注释说明。请充分理解Z信号的意义,请充分理解相对值和绝对值编码器的区别。
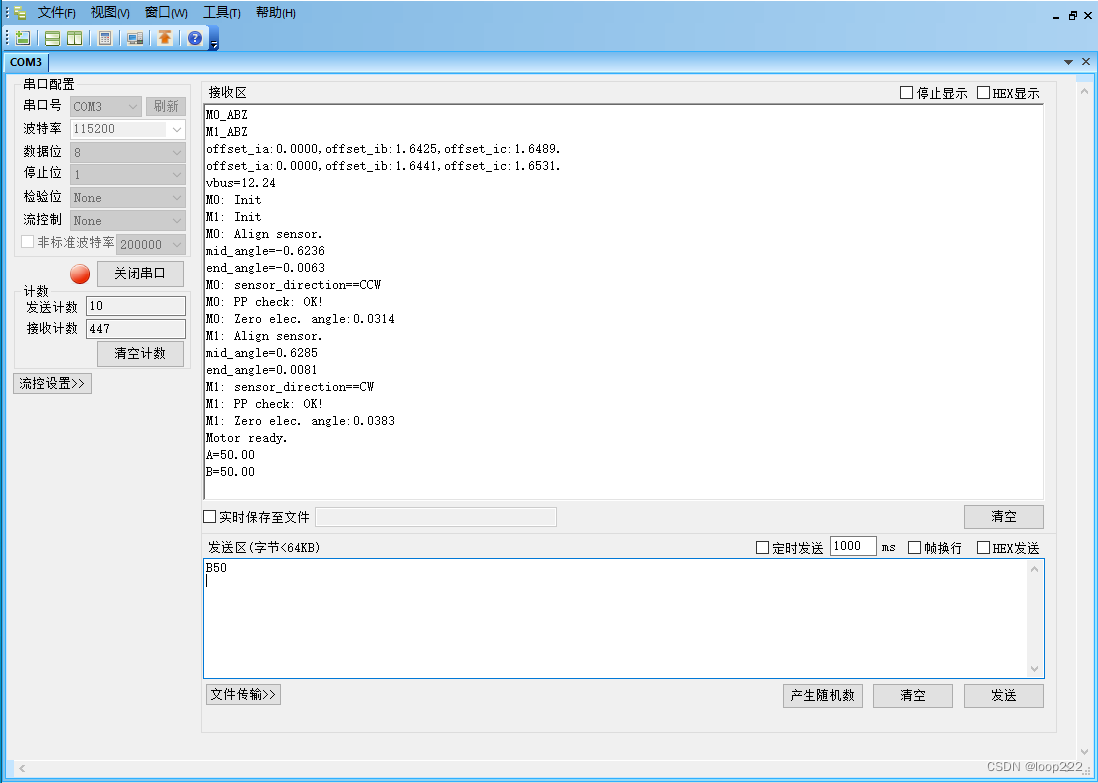
5.6、编译下载,观察运行
- 同样是T300的转速,但是电流比上一节的电流要小,不知道是PID参数设置的好,还是电流环的加入让电机更加平稳,
5.7、当前问题
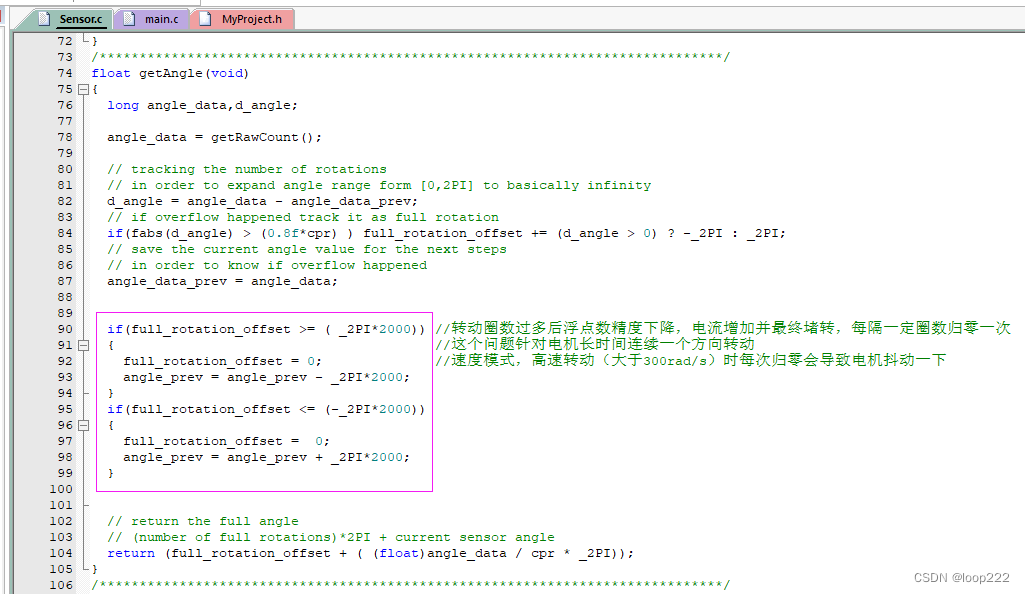
- 电机转速超过T300,电流会急剧增大,并且在每次角度跨零时抖动一下,
- 我对比了ODrive的处理方法,程序没有直接使用读取到的编码器角度,而是利用估算的角度计算,读取的编码器角度只用来校正估算角度,
- 我觉得这个问题是影响电机转速继续提升的原因。
六、双电机控制
更多详细的介绍,请阅读前面这篇文章,SimpleFOC移植STM32(六)—— 双电机控制和力矩反馈
6.1、他山之石
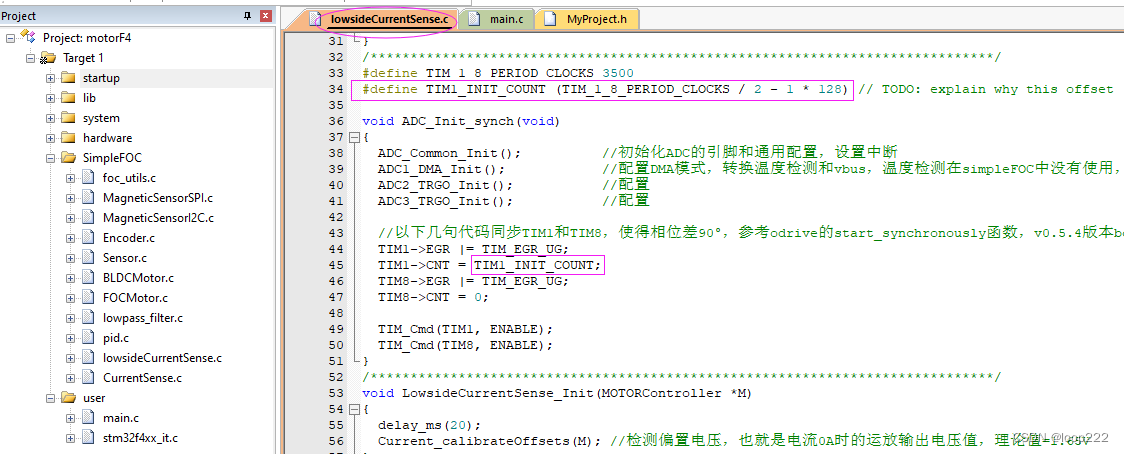
在STM32F103C8T6的应用中,电流采样采用Inline模式,AD转换随用随取,不用考虑同步的问题;而在当前的Lowside采样模式下,只能在下臂打开的同时采样电流,需要配置AD转换为定时器触发模式,先来看下odrive的电流采样方法:
-
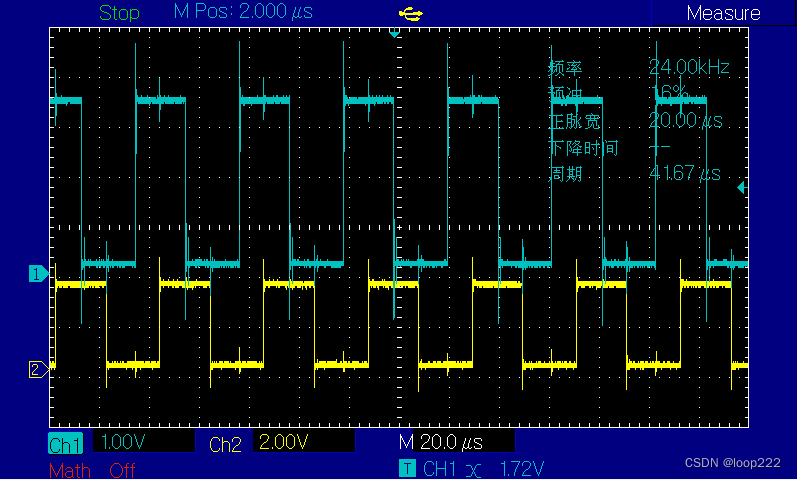
TIM1/TIM8的PWM频率配置为24KHz( 168M/(3500*2) ),
-
每个PWM周期包含两次更新,TIM_1_8_RCR为2,所以每3次触发一次定时器更新,更新频率为16KHz。
-
下臂关闭时,采集的电流为0时的值(理论值2048=1.65V),采集值用做校准。odrive在整个运行期间都不停的校准,这与一般只在上电时校准一次的做法不同,
-
下臂打开时,采样电流为有效值,
-
例如,有效值1.75V - 校准值1.65V = 0.1V,实际电流=0.1/20倍运放/0.001R=5A。
- TIM1更新触发
ADC1注入转换channel_6/Vbus,
ADC2注入转换channel_10/m0_phB,
ADC3注入转换channel_11/m0_phC, - TIM8更新触发
ADC2规则转换channel_13/m1_phB,
ADC3规则转换channel_12/m1_phC,
本文代码只在上电时,采样一次Vbus(电源电压),正常运行不对ADC1触发采样,
本文代码只在上电时,校准电流为0时的电压(理论值1.65V),正常运行不做校准,
6.2、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | 驱动板405 | 1 |
| 2 | 12V电源 | 1 |
| 3 | ST-link | 1 |
| 4 | USB转串口 | 1 |
| 5 | 带编码器航模电机 | 2 |
| 6 | 杜邦线 | 若干 |
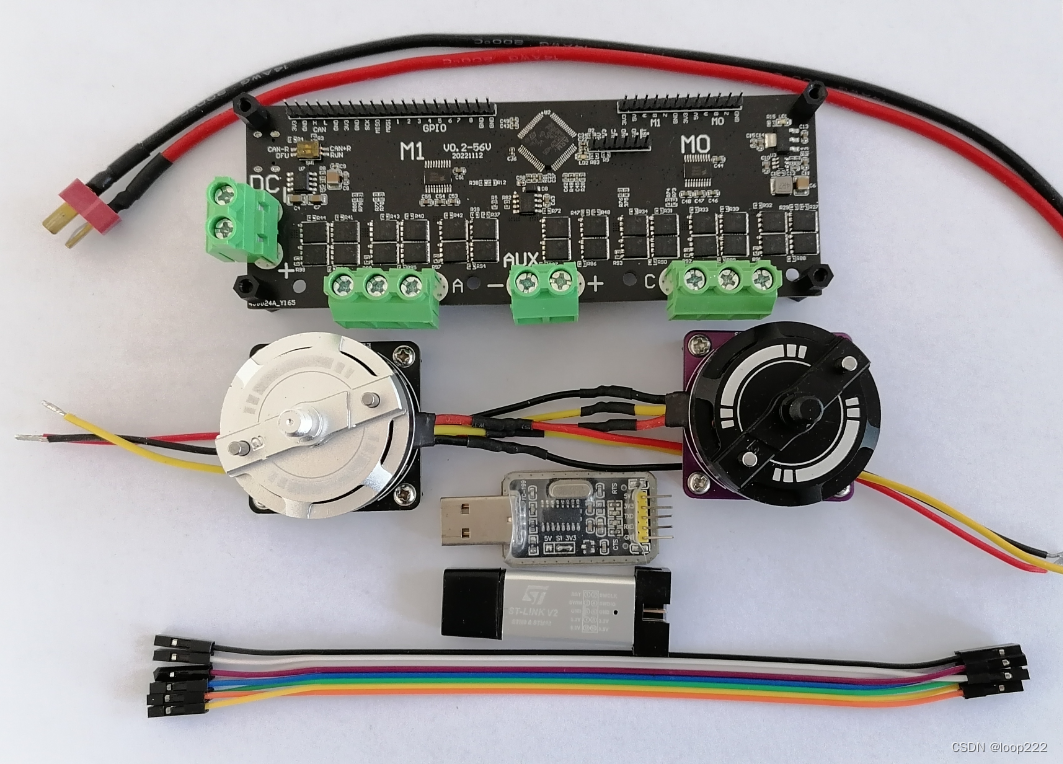
驱动板405 购买链接:https://item.taobao.com/item.htm?ft=t&id=656368067494,图锐科技
电机 购买链接:https://item.taobao.com/item.htm?ft=t&id=643573104607,图锐科技
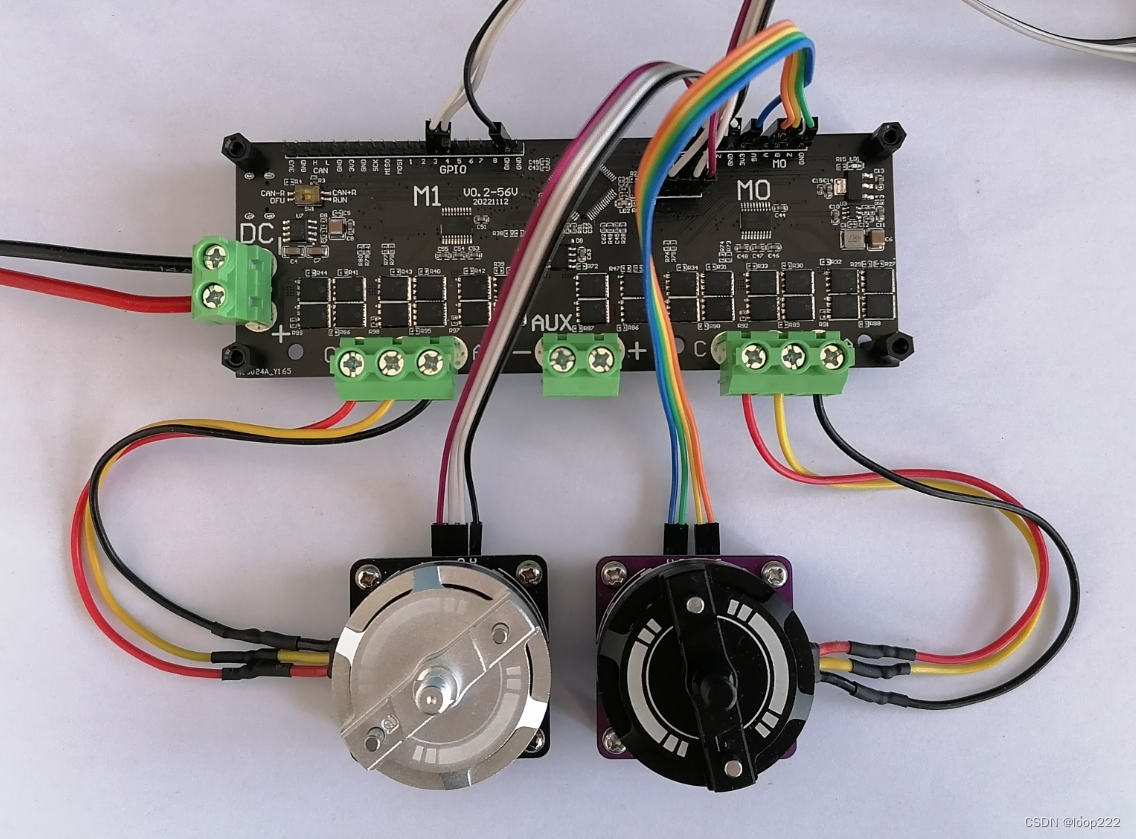
6.3、硬件连接
6.5、打开工程
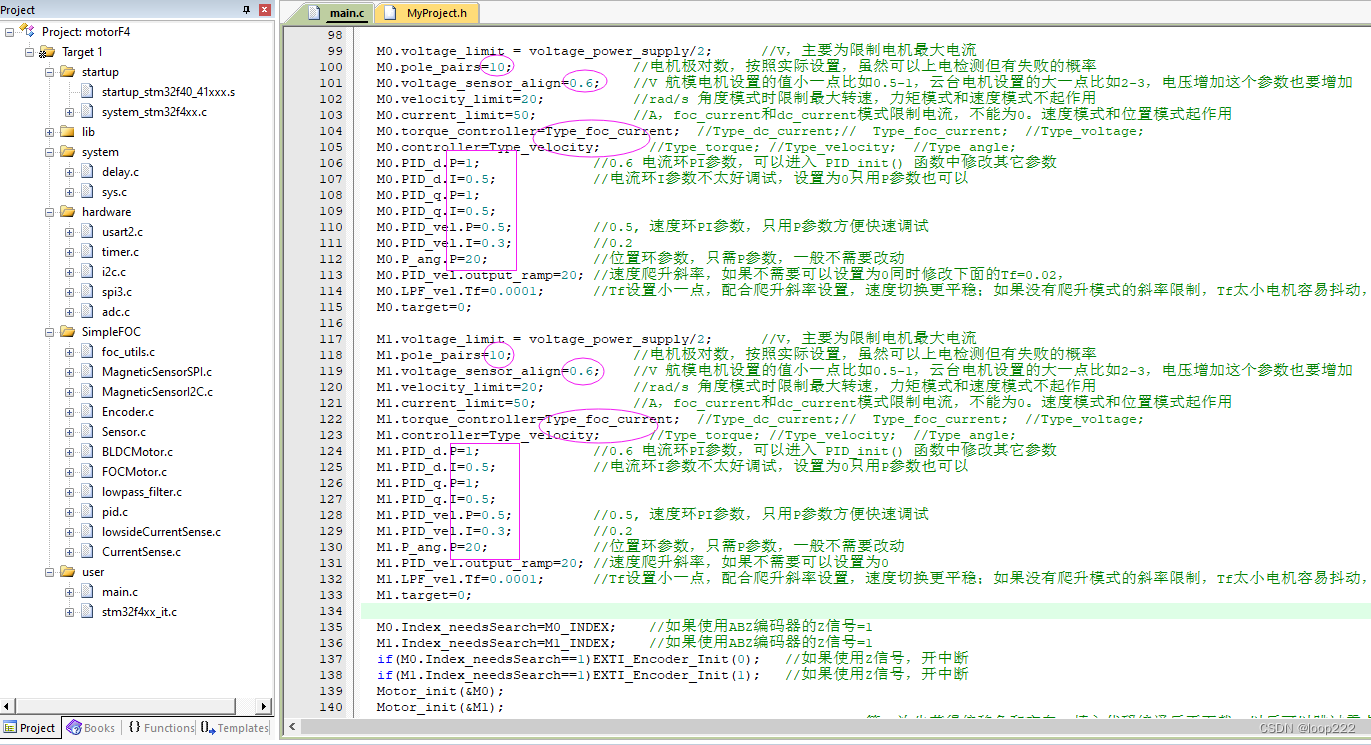
6.5、修改代码
根据编码器类型选择
6.6、编译下载,观察运行
A指令控制M0电机,B指令控制M1电机。
6.7、本节重点
- 同时控制两个电机,电机最大转速不能达到单个电机控制的最大速度T300。这个问题应该不是单片机性能不够,而是代码架构需要调整。比如像odrive一样,设定周期读取角度,处理电机转动。
- 同时控制两个电机,容易互相干扰,比如一个电机设定速度为0,另一个电机T20转动,静止的电机会发生抖动;或者电机转速设置稍微高一点有明显振动现象。参考odrive的做法,设置两个PWM波形90°相位差,
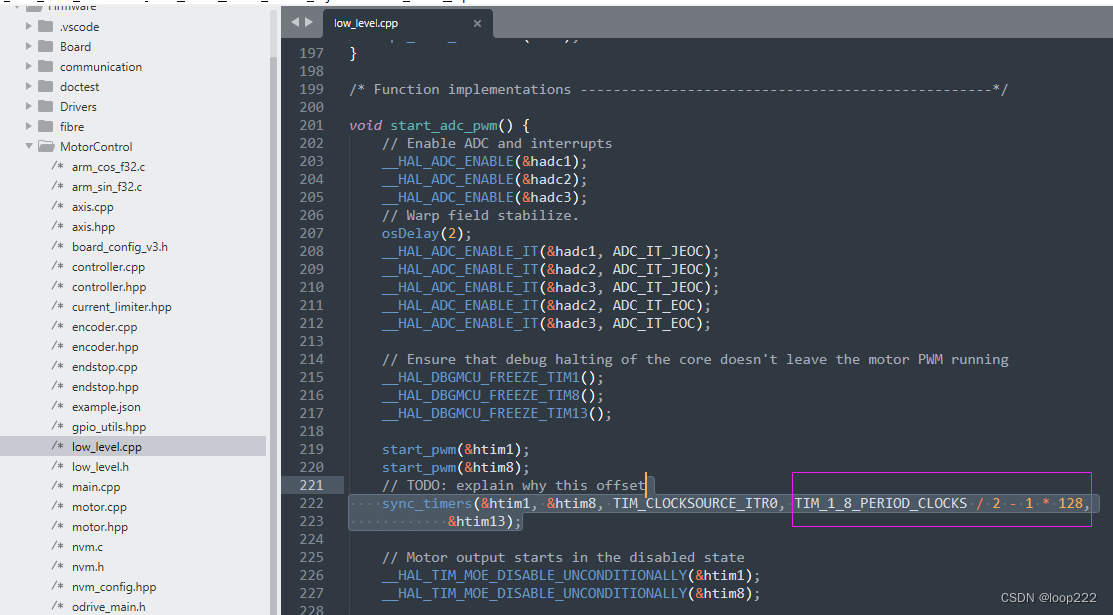
在实际控制中,参考了odrive的做法,同时根据使用的MOS管特性调整偏移值,电机之间的干扰消失,转动平稳。
七、力矩反馈
- 力矩反馈的原理,配置两个电机为力矩模式,分别读取两个电机的角度,把角度差做为力矩目标值,所以只要有角度差就有运动,直到两个电机的角度一致。
- 自从两个月前改进了力矩反馈的代码后,电机三相线可以随便接,只要电机参数设置好,力矩反馈并无难点,不再赘述!

欢迎加入技术交流群:923734429 (入群申请写:CSDN)
(完)















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









