







0. openpilot是什么
首先我们需要对openpilot要有个清楚的认知,openpilot主要基于python语言编写。openpilot进程之间通过ZMQ进行通信,使用订阅者和发布者模式,进程订阅其他进程的信息,进程一系列处理,将得到的结果发布出去,让其他进程获取其处理结果。整个openpilot项目可以分为以下几个模块:定位、决策、控制这几个部分。openpilot的实现原理类似于特斯拉靠的是纯视觉的解决方案,但因为camera只有两颗(一颗用于拍摄实现的路况,另一颗用于监控驾驶员),所以openpilot支持也比较有限, 主要支持车道保持 、ACC巡航、自动辅助变道这三个功能。当然如果是需要在汽车上使用起来需要使用EON、Harness这一系列官方的设备对接完成设备的安装与使用,但是我们也需要注意的是,openpilot同样是一个开源项目,这也就导致我们可以轻松地学习里面的一些操作以及算法。即使没有特殊的硬件或汽车,openpilot的所有服务也可以在PC上正常运行。这里官方推荐使用Carla Simulator在模拟中运行openpilot。这使openpilot可以在Ubuntu机器上的运行虚拟数据。

1. 数据结构
官方的代码还是比较清楚的,我们这里先来研究一下openpilot的整体目录
.
├── cereal # 用于所有日志的消息规范和LIB
├── common # openpilot中开发的类库功能
├── docs # 文档
├── opendbc # 显示如何解释汽车数据的文件,并以人类可读的方式对理解车辆CAN总线流量所需的信息进行编码。
├── panda # CAN通信的代码
├── third_party # 扩展第三方文件包
├── pyextra # 扩展第三方python文件包
└── selfdrive # 驾驶汽车所需的代码
├── assets # 用于用户界面的字体、图像和声音
├── athena # 允许与应用程序app实现通信
├── boardd # 守护进程与面板的通信
├── camerad # 通过驱动程序从摄像头传感器捕获图像
├── car # 用于读取状态和控制执行器的车辆特定代码
├── common # 用于守护程序的共享C/C++代码
├── controls # 规划和控制
├── debug # 帮助您调试和执行汽车端口的工具
├── locationd # 精确定位与车辆参数估计
├── logcatd # Android logcat作为服务
├── loggerd # 汽车数据记录器和上传器
├── modeld # 驾驶和监控模型
├── proclogd # 从proc记录信息
├── sensord # IMU接口代码
├── test # 单元测试、系统测试和汽车模拟器
└── ui # 用户界面
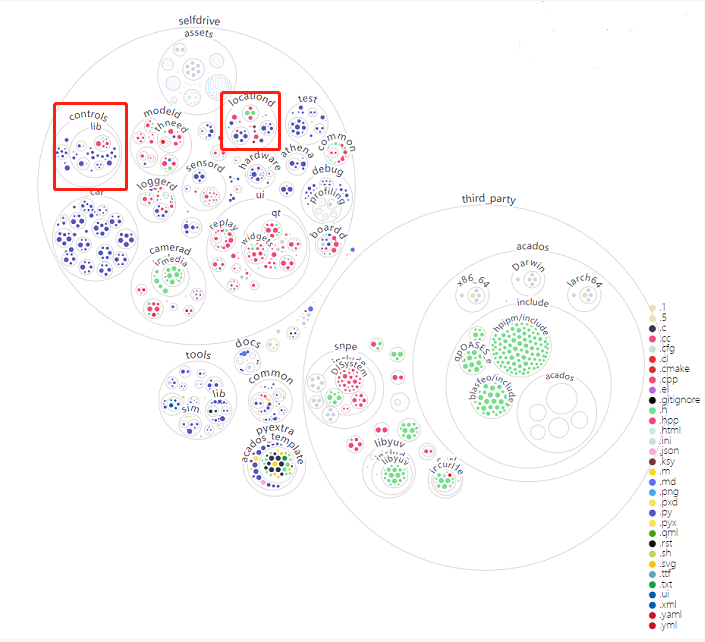
从这里我们可以发现基本上所有的核心操作都在selfdrive内部,当然也包括最核心的定位部分和规控部分。

上面的这些是openpilot的目录结构,核心的部分就是controls和locationd两个部分,与上文对应的是下图openpilot总体的架构图。首先作为输入部分深度学习模型位于modeld/models/supercombo.onnx文件中,该模型拥有非常鲁邦的输入输出模型。网络backbone部分,采用了Google团队的Efficientnet-B2结构。该结构采用复合缩放策略,主要特点是效果好,速度快。卷积部分下采样5次,为了减少参数量,有几个conv是采用group conv,激活函数函数采用Elu
-
输入数据:
- image stream:以20 Hz频率记录的连续图像帧(2565123 RGB)
- wide image stream:以20 Hz频率记录的连续图像帧(2565123 RGB)
- desire:命令模型发送one-hot encoded向量以执行某些操作:8
- traffic convention:使用one-hot encoded向量告诉模型是右车道还是左车道:2
- recurrent state:反馈到GRU中用于时间上下文的循环状态向量:512
-
输出数据:
- plan:5条预计规划线在33个时间步的预测平均值和标准偏差:4955 = 5 * 2 * 33 * 15(x,y,z位置;x,y,z速度;x,y,z加速度;r,p,y角度;r,p,y角速度)
- lanelines:4条Laneline(左外、左外、右外和右外)在33个时间步长下的预测平均值和标准偏差: 528 = 4 * 2 * 33 * 2
- laneline probabilties:4条直线中的每一条都存在的概率:8=4*2
- road-edges:2条道路边缘(左侧和右侧)在33个时间步长下的预测平均值和标准偏差:264=2 * 2 * 33 * 2
- leads:潜在2个引导车的假设在0,2,4,6,8,10s时的预测平均值和标准偏差:102=2*(264+3)
- lead probabilities:从现在起,在0、2、4s时刻有一辆领先车的概率:3=1*3
- desire state:模型认为自己正在执行8个潜在期望动作中的每一个的概率:8
- meta:关于场景的各种元数据:80=1+35+12+3
- pose:当前平移和旋转速率的预测平均值和标准偏差:12=2*6
- recurrent state:反馈到GRU中用于时间上下文的循环状态向量:512



















 7167
7167

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











