







1. 陀螺仪 (Gyroscope)
1.1 动态误差指标
-
动态范围/满量程 (Dynamic/Full-Scale Range)
- 指量程,量程越大,绝对误差越大。
- 车载使用500 deg/s量程,无人机使用2000 deg/s量程。
-
灵敏度比例因子 (Sensitivity Scale Factor)
- 单位为 LSB/°/sec,表示陀螺仪输出数字量转化为角速度的比例因子。
-
比例因子初始值误差 (Sensitivity Scale Factor Initial Tolerance)
-
重复性 (Repeatability)
- 指陀螺仪的比例因子在不同上电状态下的重复性,关键误差指标。
- 误差为1σ 0.3%,2σ 0.6%。
-
全温误差 (Sensitivity Scale Factor Variation Over Temperature/Error over Temperature)
- 比例因子在额定工作温度范围内的变化,0.005%表示对温度不敏感。
-
交叉轴灵敏度 (Cross-Axis Sensitivity/Misalignment Error)
- 陀螺三轴的非正交误差。
-
非线性 (Nonlinearity)
- 满量程直线拟合后的残差,0.1%算是中规中矩。
1.2 静态误差指标
-
初始零偏容忍度 (Initial ZRO Tolerance)
- 零偏误差,常值误差。
-
零偏随温度变化 (ZRO Variation vs. Temperature/Error over Temperature)
- 零偏在额定工作温度范围内的相对变化量,0.02°/s表示较敏感。
-
零偏重复性 (Bias Repeatability)
- 长时间工作后的零偏变化程度,0.4°/sec为较大值。
-
运行中的零偏稳定性 (In-Run Bias Stability)
- 上电后的零偏不稳定性,<10 deg/hr算是较好。
-
角度随机游走 (Angular Random Walk)
- 陀螺仪输出的角速率白噪声,0.15 deg/sqrt(h)算是较小。
-
线性加速度影响 (Linear Acceleration Effect)
- 陀螺零偏的加速度敏感性,0.009°/sec/g。
-
速率噪声谱密度 (Rate Noise Spectral Density)
- 与ARW相同。
-
噪声幅度RMS值 (Total RMS Noise)
-
3dB带宽 (3dB Bandwidth/Low Pass Filter Response)
-
传感器谐振频率 (Sensor Resonant Frequency)
2. 加速度计 (Accelerometer)
2.1 动态误差指标
-
动态范围 (Full-Scale Range)
-
灵敏度 (Sensitivity)
-
灵敏度初始值误差 (Sensitivity Scale Factor Initial Tolerance)
-
全温误差 (Sensitivity Change vs. Temperature/Error over Temperature)
-
重复性 (Repeatability)
- 0.2%算是一般水平。
-
交叉轴灵敏度 (Cross-Axis Sensitivity/Misalignment Error)
-
非线性 (Nonlinearity)
2.2 静态误差指标
-
初始容忍度 (Initial Tolerance)
-
零重力水平变化 (Zero-G Level Change vs. Temperature)
-
零偏重复性 (Repeatability)
- 加速度计零偏重复性为1.4 mg,表现优异。
-
运行中的零偏稳定性 (In-Run Bias Stability)
-
速度随机游走 (Velocity Random Walk)
- 0.012m/sec/sqrt(hr)表示噪声水平很小。
-
全温零偏误差 (Error over Temperature)
-
输出噪声 (Output Noise/Total RMS Noise)
-
噪声密度 (Noise Density)
-
3dB带宽 (3 dB Bandwidth)
-
传感器谐振频率 (Sensor Resonant Frequency)
3. 如何选择IMU器件
3.1 参数解析
- gyroscope陀螺仪
1.1 动态误差指标
(1)dynamic/Full-Scale range动态范围/满量程: 指的是量程, 量程越大,绝对误差越大.
(2)车载:使用500 deg/s量程
(3)无人机:使用2000deg/s量程

(2)sensitivity scale factor比例因子灵敏度: 有时直接表示sensitivity,都指的是惯性器件的比例因子(标度因子)的设计值。

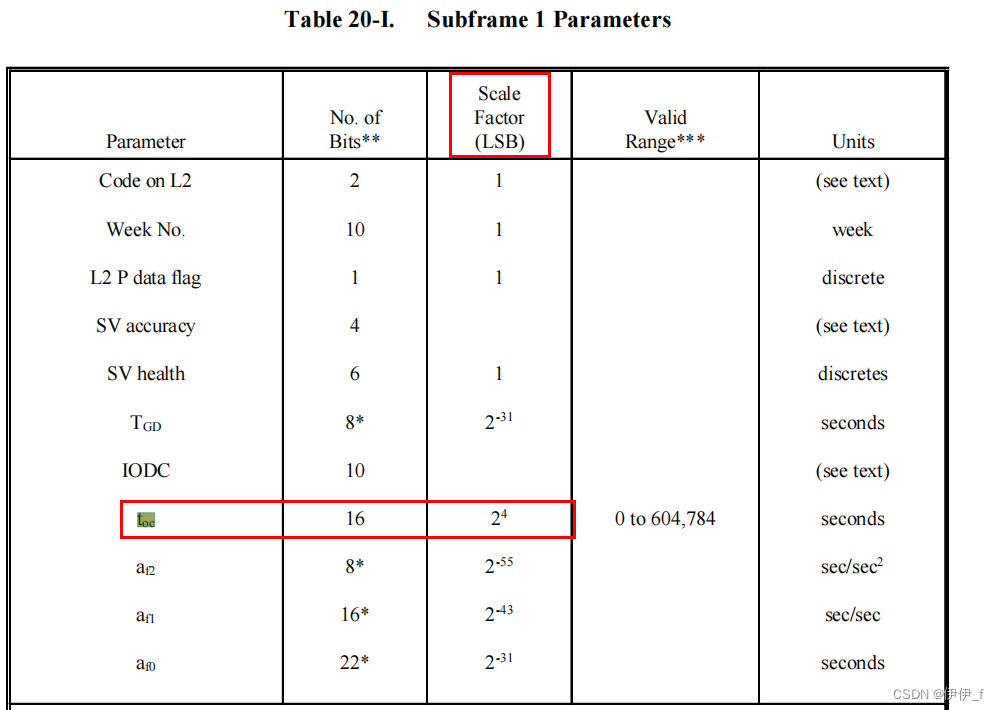
它的单位是LSB/°/sec或LSB/(°/sec),LSB是指传感器输出数字量的最低有效位(Least Significant Bit).
它的作用: 如何将器件输出的数字量转化成陀螺角速度,这个有点像导航报文中如toc的比例因子最低有效位为16(2的四次方 ),即获取的值要乘以16
(3)Sensitivity Scale Factor Initial Tolerance比例因子的初始值误差

(4)Repeatability:指的是陀螺比例因子的逐次上电重复性,(另一个说法是 惯性器件不同次上电运行时的零偏的不重复程度)。这是关键误差指标

误差为1sigma 0.3%,算是比较大的. 2sigma 0.6%
(5)Sensitivity Scale Factor Variation Over Temperature/Error over Temperature 比例因子的全温误差: 指的是 比例因子在额定工作温度范围内相对于室温(25℃)比例因子的相对变化.反应比例因子对温度的敏感度. 0.005%算是对温度不怎么敏感

(6)Cross-Axis Sensitivity/Misalignment Error:指的是陀螺三轴的非正交误差

(7) Nonlinearity:非线性是满量程直线拟合后的残差,0.1%(千分之1)算是中规中矩

1.2 静态误差指标:
(1)Initial ZRO Tolerance: 零偏误差(常值误差)
0.5deg/s=1800deg/h

(2)ZRO Variation vs. Temperature/Error over Temperature:零偏在额定工作温度范围内相对于室温(25℃)时的零偏的相对变化量.反应零偏相对温度的敏感度.0.02°/s可换算成72°/h,表明陀螺零偏对温度比较敏感。

(3)Bias Repeatability:与前面比例因子的Repeatability类似,重要精度指标.长时间工作后其变化程度. 0.4°/sec是非常大的,换算后是1440°/h. 在组合导航中,IMU独立工作时间不会很长比如过隧道大概需要几分钟到10几分钟. 0.4°/sec=24deg/min.
好在用于GNSS/INS组合导航时,这种缓变或单次使用中不变的零偏误差成份能够被组合导航算法进行在线估计和补偿,对系统性能影响不大
另一种解释:
指的是零飘稳定度. 比如说在某个温度的范围内,使用了一段时间,还能一直保持不变的零飘. 比如0.07deg/s:每秒有0.07deg的误差,1小时的误差=0.07deg*3600=252deg/hr. 零飘可以在应用种校准,比如零飘1度.那么在应用时是减去1度校准到0度.但是用了段时间后,零飘又出现了. repeatability衡量这个稳定性。
这个指标用于这种场景: 无法对零偏进行校准并且对零偏进行积分算出 角度,则必须关注这个指标,值越小越好.

(4)In-Run Bias Stability:单次上电的零偏不稳定性(使用Allan方差的零偏不稳定性),
另一个说法是零偏稳定性,就是大家问的这个陀螺运行多长时间偏了多少度,通常用deg/hr表示, <10deg/hr算是比较好的了

(5) Angular Random Walk:角度随机游走ARW,实际上就是陀螺输出的角速率白噪声
0.15deg/sqrt(h)=0.15/60deg/s/sqrt(Hz)=0.0025deg/s/sqrt(Hz) 算是比较小

(6)Linear Acceleration Effect:陀螺零偏的加速度敏感性,0.009°/sec/g可换算成32.4°/h/g,不算小,不能忽略

(7)Rate Noise Spectral Density:噪声功率谱密度,与ARW一样的意思(有的资料标功率频谱密度,有的标ARW)

(8)Total RMS Noise噪声幅度RMS值: 与ARM都表示白噪声,这里指的是噪声幅值,可以通过公式转化RMS=ARW*sqrt(BW) 其中BW为带宽

(9)3dB Bandwidth/Low Pass Filter Response: 带宽

(10)Sensor Resonant Frequency/Gyroscope Mechanical Frequencies :指陀螺内部微硅机械结构的谐振频率,频率越高越好,这样内部感知结构不容易被环境中的声波(例如汽笛)或尖锐冲击所干扰.
- accelerometer加速度计
2.1 动态误差指标
(1)Full-Scale Range:量程范围
(2)Sensitivity Scale Factor:比例因子

(3)Sensitivity Scale Factor Initial Tolerance:比例因子零偏

(4)Sensitivity Change vs. Temperature/Error over Temperature: 比例(标度)因子的全温误差
 (5) Repeatability: 0.2%即千分之二,一般
(5) Repeatability: 0.2%即千分之二,一般

(6)Cross-Axis Sensitivity/Misalignment Error: (7)Nonlinearity:
(7)Nonlinearity:

2.2 静态误差指标
(1)Initial Tolerance :零偏

(2)Zero-G Level Change vs. Temperature

(3)Repeatability:加速度计零偏重复性为1.4 mg,这个很让人惊喜,典型的战术级水平

(4)In-Run Bias Stability:3.6ug也是够小的了

(5)Velocity Random Walk:速度随机游走VRW,加速度计输出比力的白噪声,噪声水平很小,战术级水平
0.012m/sec/sqrt(hr) = 0.0002m/s/sqrt(s)=0.0002 m/s^2/sqrt(Hz) = 20ug/sqrt(Hz)

(6)Error over Temperature:加速度计的全温零偏误差,只有1mg(1σ),算是非常稳定,战术级水平

(7)Output Noise/Total RMS Noise:噪声幅度RMS值

(8)Noise Density:

(9)3 dB Bandwidth:

(10)Sensor Resonant Frequency:

4.如何选择
如何选择IMU器件主要看零偏误差:零篇误差包括常值误差、全温零偏误差、零偏重复性、零偏稳定性
(1)常值零偏(Initial Tolerance):指器件产出来后就有一直固定不变的零偏值,实际使用中可以补偿,例如在初始启动过程中利用几秒钟的静态数据求平均即可扣掉大部分
(2)全温零偏误差(Error over Temperature):指惯性器件零偏在其额定工作温度范围内相对于室温零偏值的变化量
(3)零偏重复性:指惯性器件不同次上电运行时的零偏的不重复程度,很好理解,我们希望每次上电时零偏值都一样,这样零偏值是个常数.但是现实中不可能每次上电零偏都一样,有时是一样但有时不一样,所以这个指标反应的是不重复程度. 越小越好。
(4)零偏稳定性: 严格说是零偏不稳定性,指的是器件上电稳定后其零偏随时间变化的情况
测试方法有两种:
a) 国标法:采集几个小时的静态数据,每10秒或100秒求平均(以便抑制器件白噪声的影响),然后统计这些平均值的标准差。
b) Allan方差法:采集足够长时间的静态数据(一般大于10小时,越高等级的器件所需时间越长),画Allan方差曲线,取其谷底值
https://docs.phillweston.com/article/mems-imu-selection-reference-table
https://blog.csdn.net/fanxianchao_2012/article/details/126121533

















 1303
1303

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









