






基于扩展卡尔曼滤波EKF的车辆状态估计。
估计的状态有:车辆的横纵向位置、车辆行驶轨迹、横摆角、车速、加速度、横摆角速度以及相应的估计偏差。
内容附带Simulink模型与MATLAB代码,以及参考文献。
ID:21100712188398480
灵犀Mr_p


基于扩展卡尔曼滤波EKF的车辆状态估计
引言
车辆状态估计是自动驾驶系统中至关重要的一环。通过对车辆的横纵向位置、行驶轨迹、横摆角、车速、加速度和横摆角速度等参数进行准确估计,可以为自动驾驶系统提供关键的输入信息,从而实现安全、高效的驾驶体验。在本文中,我们将介绍基于扩展卡尔曼滤波(EKF)的车辆状态估计方法,并分享相应的Simulink模型与MATLAB代码,以帮助读者更好地理解和应用该方法。
一、扩展卡尔曼滤波概述
扩展卡尔曼滤波是一种常用的非线性状态估计方法,基于卡尔曼滤波理论并通过线性近似的方式处理非线性问题。在车辆状态估计中,由于车辆的运动模型和测量模型通常是非线性的,因此采用扩展卡尔曼滤波能够有效地解决这一问题。
扩展卡尔曼滤波的基本思想是通过预测和更新两个步骤对状态进行递推估计。具体而言,预测步骤利用车辆的运动模型,根据当前状态估计值和系统的动力学方程预测下一个状态估计值;更新步骤则利用车辆的测量模型,根据预测得到的状态估计值和测量值对状态进行修正。通过不断地迭代这两个步骤,扩展卡尔曼滤波能够逼近真实状态并提供准确的估计结果。
二、基于EKF的车辆状态估计方法
基于扩展卡尔曼滤波的车辆状态估计方法主要包括以下几个步骤:
-
系统建模:根据车辆的运动模型和测量模型,建立状态空间模型。在本文中,我们考虑车辆的横纵向位置、车辆行驶轨迹、横摆角、车速、加速度、横摆角速度以及相应的估计偏差作为状态变量,并考虑测量模型与真实状态之间的误差。
-
扩展卡尔曼滤波:利用上述建立的状态空间模型,采用扩展卡尔曼滤波算法对车辆的状态进行估计。具体而言,预测步骤利用车辆的运动模型进行状态预测,更新步骤根据预测得到的状态估计值和测量值进行状态修正。
-
参数调整:对EKF中的参数进行调整,以提高状态估计的准确性和鲁棒性。这些参数包括状态间的协方差矩阵、过程噪声协方差矩阵和测量噪声协方差矩阵等。
-
性能评估:对估计结果进行性能评估,包括估计偏差、估计精度和收敛速度等方面的指标。根据评估结果,可以对系统进行进一步的改进和优化。
三、Simulink模型与MATLAB代码
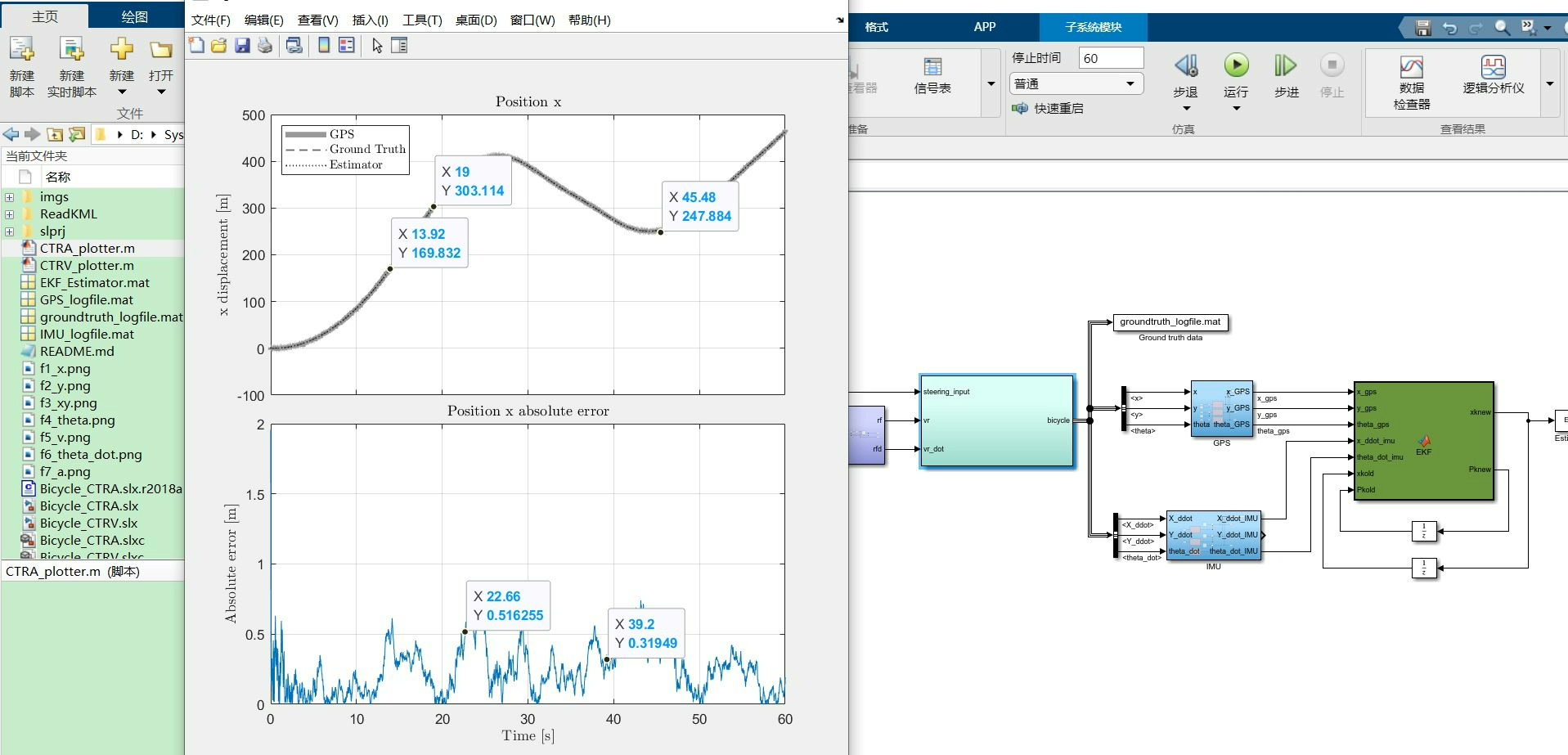
为了帮助读者更好地理解和应用基于扩展卡尔曼滤波的车辆状态估计方法,我们提供了相应的Simulink模型与MATLAB代码。通过这些工具,读者可以直观地观察到状态估计的过程,并根据自己的需求进行模型的调整和参数的优化。
在Simulink模型中,我们将车辆的运动模型、测量模型和扩展卡尔曼滤波算法进行了集成。读者可以根据自己的需求修改模型中的参数和信号输入,观察状态估计结果的变化。另外,在MATLAB代码中,我们提供了基于EKF的状态估计算法的具体实现,读者可以根据自己的需要进行二次开发和调试。
结论
本文介绍了基于扩展卡尔曼滤波的车辆状态估计方法,并分享了相应的Simulink模型与MATLAB代码。通过这些工具,读者可以深入理解该方法的原理和实现细节,并根据自己的需求进行模型的调整和参数的优化。车辆状态估计作为自动驾驶系统中的重要环节,其准确性和稳定性将直接影响系统的性能和安全性。希望本文能够为读者在车辆状态估计领域的研究和应用提供有益的参考和借鉴。
[hot][hot][hot][hot][hot][hot][hot][hot][hot][hot]
【相关代码 程序地址】: http://nodep.cn/712188398480.html















 780
780











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









