







1 概述
近年来,为适应世界海运的发展潮流,中国加快了深水大港的建设步伐,先后有多条20~30万t级的深水航道投入使用。对于人工航道而言,向海洋纵深的延伸必定引起疏浚总长的大幅增加。以天津港为例,近年一直投入巨资进行主航道的扩建工作,继25万t级航道建成之后30万t级航道已于2010年9月开工建设,目前航道总里程已超过45 km。
对于超长航道疏浚工程的水位控制,一直是从事疏浚工程测量工作的技术人员着力研究的重要课题,目前有几种比较成熟的解决方案。
1.1 潮位观测
在疏浚区设立潮位观测站直接观测潮位,根据传统方法传递基准。这种方法为传统常规方法,优点是观测成果准确可靠。缺点是作业复杂困难,且工作量大。
1.2 潮位推算
根据若干长(短)期验潮站的验潮资料,通过调和分析的方法确定每个分潮的调和常数,由此建立各潮位站间海域的潮位模型。通过潮位模型对测量船位置的天文潮位进行预报,结合已知站余水位对预报天文潮位进行订正后,所得潮位即可作为水深测量潮位改正的依据。这种方法优点是作业方便简单。缺点是精度受调和参数及余水位相关度的限制。
1.3 潮位传递
根据两个或两个以上有效距离控制内的已知站进行分带内插改正,或者进行潮位模拟相关来推算疏浚区潮位。这种方法的优点是作业简单。缺点是向海内延伸一般很难找到已知潮位控制站,而且精度受到潮位站有效距离和相关性的控制。
1.4 GPS RTK潮位测量
RTK是基于载波相位测量的实时差分定位技术,该技术已广泛用于河道/海道测量中,能够在动态情况下获得cm级的平面和高程定位结果。RTK三维水深测量是利用GPS的cm级测高成果,精密测定测深仪换能器的瞬时高程,进而测定海底的高程。RTK定位具有实时性,可以获得每个历元的高精度三维解,又可以消除测艇动吃水、涌浪等方面的影响,非常适合实时潮位测量[1]。但不足的是GPS RTK测量的作用距离受无线数据传输的影响,一般情况下作用距离只能达到20 km,对于超长航道的潮位控制通常难以胜任。
上面几种方法尽管有效,但还存在诸多需要注意的问题,潮位推算技术常受到潮位模型误差、验潮站缺失、气候等因素的影响,造成潮位数据误差过大甚至数据空白[2]。另一方面,潮位模型通常对被潮位站包围的水域具有较好的计算精度,而对于延伸较远的外航道水域则可能不被潮位站有效范围所覆盖,如果使用外推潮位,就必然会给潮位计算带来较大的误差。因此需要找到一种更有效的方法来解决长距离航道疏浚工作中潮位控制问题。本文就是从这个目的出发,根据现在测量技术发展水平,提出一种新的潮位测量方法。
2 GPS PPK潮位测量
GPS PPK与RTK技术基本原理相似,但采用的是后处理技术,其作用距离不受数据传输的约束,可以达到50~80 km[3]。加之后处理模式数据稳定、解算灵活,因此GPS PPK的潮位测量的精度和可靠性要高于RTK测量。
2.1 GPS PPK定位原理
PPK(Post Processing Kinematic)模式即后处理动态测量模式,是GPS测量作业的一种常用模式。在测量过程中,只需连续记录基准站和流动站的原始观测数据,而无需在站间进行实时数据通讯。事后利用IGS提供的精密星历或广播星历、原始记录数据和基准站的已知坐标,计算出基准站的相位改正数。根据GPS定位原理,基准站和流动站在一定距离范围内定位误差具有较好的空间相关性,故可以利用基准站的相位改正数对流动站的相位观测数据进行改正,进而获得流动站的精确三维坐标[4-8]。
2.2 GPS PPK潮位测量的可行性
2.2.1 测量精度可以满足要求
双频GPS 在PPK作业模式下,其测量精度的计算公式为
平面定位精度:
![]()
(1)
高程定位精度:
![]()
(2)
式中:D 为基线长度,km。
根据上式,在基线长80 km范围内,平面和高程定位精度均≤±10 cm,可以满足疏浚工程水深测量对潮位控制的精度要求。
2.2.2 双频GPS接收机已经广泛普及
随着双频GPS的逐渐普及,已从以前的高端设备变成了现在的标配装备,如今一台双频GPS的售价仅相当于以前一台2″级全站仪的价格。目前绝大部分科研院所和测量单位都配备了自己的双频GPS,并广泛应用于大地测量、施工测量等各个领域。因此,为现有的水深测量系统配备GPS PPK潮位测量设备,并不会过多增加测绘单位的仪器购置成本。
2.2.3 仪器性能可以满足测量要求
GPS相位测量技术发展到现在已经非常成熟,现在普通双频GPS测量设备的性能已经比以前有了较大提升:
(1)GPS跟踪性能。近年来各生产厂商投入大量人力、物力用于GPS产品的技术研发工作,高性能的GPS接收天线以及信号增强技术的不断应用,使得新型GPS接收机的抗干扰能力、连续锁定能力、抗多路径效应能力、相位中心稳定性等均有显著提高。
(2)动态初始化。单频GPS接收机在PPK模式下工作时,需在接收天线静止不动的情况下进行静态初始化。双频GPS接收机的工作原理是进行载波相位观测,为了实现接收机真正意义上的实时动态测量,动态初始化(OTF)技术应运而生,目前市面上的双频GPS接收机均可实现运动状态下的初始化。
2.2.4 解算软件
一般厂商的GPS接收机都会随机配备相应的解算软件,可以进行各自产品在标准静态、PPK等工作模式下数据的基线解算,同时又具备数据的输入、输出、数据浏览、坐标系定义、平差计算等多种功能。对于PPK数据的解算和成果数据输出,均可通过随机软件或第三方软件实现。
2.3 在航潮位的提取
GPS PPK测得的海面高程是瞬时的,直接反映海水面的起伏变化。事实上海面的瞬时高程 H 包含了多种因素的影响,即瞬时海面 H 是潮汐 T 和波浪 w 综合作用的结果。为获得真实的潮位,要从潮位观测量中消除波浪因素的影响[2,9]。
潮位本身是一个变化相对稳定的水位面,为了从GPS观测的瞬时海面高程中提取出潮位,需要考虑瞬时海面这一综合波动中各波段信号的频谱特征。潮位为长周期项,周期一般为几个小时,涌浪影响项为短波项,周期一般为10~60 s。根据这些信号的频谱特征,采用低通滤波的方法对综合信号中的短周期项进行过滤,所得中长周期项即为在航潮位。
3 深度基准面的确定
3.1 PPK大地高与理论最低潮面关系的确定
GPS测量的是基于WGS84椭球面的大地高,要实现WGS-84椭球面与航道深度基准面之间的高程转换需要通过两步来实现:
第1步是高程基准面从椭球面到似大地水准面之间的转换,即大地高向正常高的转换;
第2步是高程基准面从似大地水准面向理论最低潮面的转换,即正常高向海图高的转换[1]。
要实现二者之间的转换需要建立一个连续的海图高程基准模型,即无缝垂直基准面模型。在获得无缝垂直基准模型后,再通过下式即可实现WGS-84大地高到海图高的转换:
![]()
(3)
式中:
![]()
为海图高;
![]()
为大地高;
![]()
为高程异常;
![]()
为理论最低潮面相对似大地水准面的差距。
对于测量区域距岸较远的超长航道,可以采用验潮仪和GPS验潮相结合的方法,利用上式确定各高程基准面间的关系,从而实现在航GPS PPK潮位结果向海图基准高程的转换。
3.2 深度基准面的确定
为了确定长期平均海平面,可通过以下几种方法进行:
(1)调和分析确定平均海平面
(2)平均海平面定义确定法
(3)平均海平面同步传递法
(4)线性关系最小二乘拟合法
用于确定深度基准面的方法主要有:
(1)弗拉基米尔斯基模型法
(2)深度基准面传递法
(3)保障率定义法
对于基准面的确定,可通过不同的方法相互检核和综合取舍。鉴于篇幅关系,以上各计算方法在此不做详细阐述。
3.3 航道垂直无缝基准的建立
建立区域高精度的深度基准面模型是实现GPS PPK潮位测量深度基准面无缝衔接的基础工作,同时也是GPS PPK在航潮位测量的关键。航道无缝垂直基准模型可采用内插的方法建立:
首先在航道潮汐特征点位置设置验潮站,单点计算深度基准面后,采用线性内插的方法获得整个航道的深度基准面模型,确保深度基准面空间变化的连续性,最后通过数据处理将GPS PPK测得的任意测点处的海面高程信息,归化于该垂直基准面模型上,得到相应的在航潮位成果。
4 GPS PPK潮位测量作业流程及应用实例
4.1 作业流程
4.1.1 仪器安置
PPK属于差分GPS技术,应当在岸边已知控制点上架设基准站。流动站天线尽量架设于测船的重心位置RP (Reference Point)上方,基准站与流动站的采样率应保持一致,可设定为0.2~1 Hz。测量开始前应严格量测基准站天线高以及流动站GPS 天线在船体坐标系VFS(Vessel Frame System)下的坐标[1]。仪器安置原理见图1所示。
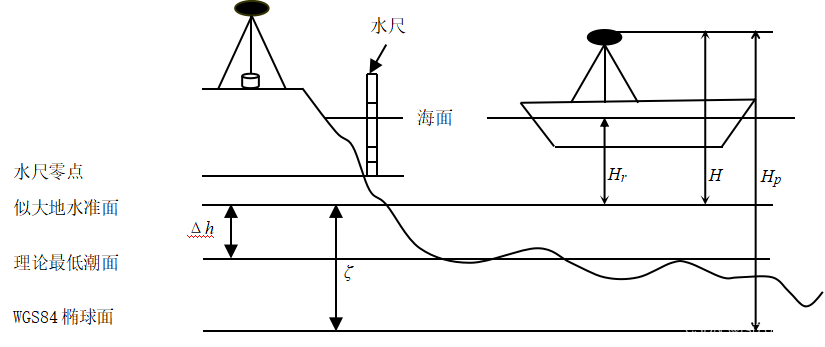
图1 GPS PPK潮位测量仪器的安置[2]
Fig.1 Placement of GPS PPK tide measuring instruments
4.1.2 初始化
根据经验,双频GPS接收机在失锁后重新动态初始化所需时间T的计算公式为
![]()
(4)
式中:
![]()
为动态初始化时间,min;
![]()
为移动站与基准站之间的距离,km。
根据上式,可计算得到典型的距离与初始化时间如表1所示。
表1 双频GPS接收机动态初始化时间
Tab.1 Dual-frequency GPS receiver dynamic initialization time
| 移动站与基准站之间的距离 (km) | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 |
| 动态初始化所需时间 (min) | 3.5 | 6.0 | 8.5 | 11 | 13.5 | 16 | 18.5 | 21 |
为了保证在航潮位测量数据的可靠精度,可约定在开始水深测量前进行不少于15min的静态初始化。在数据采集期间如出现卫星失锁、数据采集中断等情况时,应暂停水深数据采集不少于30min以保证动态初始化的成功。
4.1.3 数据采集
为保证GPS PPK获取数据及潮位提取的质量,数据采集期间应注意如下事项:
(1)数据采集时间应超出水深测量前、后各20 min;
(2)测量期间应每隔10 min检测GPS接收机的工作状态,同时查看接收机的电池电量和存储卡的剩余容量,如剩余容量无法满足测量要求时,应及时更换存储介质或采取相应措施;
(3)如在测量过程中出现GPS信号失锁情况,应立即停止水深测量作业,完成动态初始化之后方可继续水深测量工作;
(4)对于数据采集期间出现的异常情况,应记入测量工作日志以便内业数据处理时查阅。
4.1.4 GPS PPK数据解算
对于GPS PPK测量的原始数据,应对动态基线进行解算后方可获得相应的测高成果。基线解算期间如发现测量数据中出现不良数据,可对其进行人工删除。
对流层及电离层模型可使用软件推荐的随机模型,整周模糊度未能解算的测量点应及时剔除。测量数据解算完成后,使用预定义的转换参数将成果转换至指定坐标系下,并按照要求输出为相应的数据格式。
4.2 GPS PPK 在航潮位测量在天津港主航道的实现
4.2.1 深度基准面的确定
为了获得天津港主航道深度基准面的分布情况,根据在南疆码头、大沽灯塔、航道里程K34+000、K44+000区域布设的验潮仪采集的数据,进行平均海平面的归算以及理论最低潮面的传递,计算工作均使用专门研制的海洋基准确定及传递软件进行。
4.2.2 航道无缝垂直基准的建立
为获得适用于水深测量的潮位数据,GPS PPK测高数据的处理流程为:

图2 GPS PPK测量数据的处理流程
Fig.2 Flow chart of GPS PPK measurement data processing
基线解算使用GPS随机配备的后处理软件进行,将解算结果(GPS大地高)使用天津港地区的严密坐标转换参数转换为正常高,由于天津港航道理论最低潮面的基准面自港区向外逐渐抬高,还应进行由正常高向理论最低潮面高程转换的基面拟合,基面拟合所需参数通过标定测量的方式获取。
GPS PPK标定测量采用在航状态进行,由测量船自天津港航道K0+000至K45+000往返航行一个航次,数据采集期间要求等速、直线航行,避免突然转向、停船等情况。分别在航道K2+500、K24+000、K36+000(航道转点)、K45+000求取GPS PPK正高相对于理论最低潮面高程的标定值,使用往测标定、返测校核的方式以保证标定结果的可靠性。
各潮位特征点的标定结果见表2:
表2 天津港航道特征点标定数据
Tab.2 Feature point calibration values of Tianjin Port Channel
| 标定点 | 往测标定值(m) | 返测标定值(m) | 互差(m) | 平均值(m) |
| K2+500 | -0.023 | -0.066 | 0.043 | -0.044 |
| K24+000 | -0.154 | -0.177 | 0.023 | -0.166 |
| K36+000 | -0.374 | -0.363 | -0.010 | -0.368 |
| K45+000 | -0.495 | -0.495 | 0.000 | -0.495 |
根据标定测量成果,对上述各点的改正值进行线性内插后可获得整个航道的PPK正高改正值,进而根据这一系列改正值建立航道沿线的无缝垂直基准模型。值得注意的是,PPK正高改正值不但包含理论最低潮面沿航道方向的变化量,还包含了GPS大地高向正常高转换的残差。
4.2.3 GPS PPK潮位提取
GPS PPK潮位测量原始数据经解算完成后,导入GPS在航潮位数据处理系统进行数据滤波等处理后,提取出指定时间间隔(1~10 min)的潮高成果。对提取出的潮位数据依照航道无缝垂直基准模型进一步修正后,即可获得精确的在航潮位信息。
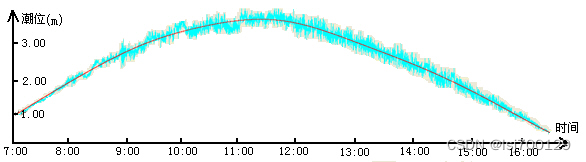
图3 GPS PPK潮位数据提取
Fig.3 GPS PPK tide data extraction
5 GPS PPK在航潮位测量精度验证
5.1 试验测区
为了对GPS PPK在航潮位的测量精度进行详细验证,在天津港航道最外端(K44+000以外)选择一处测试水域,整个区域大小约1300 m×1300 m,水深分布18~22 m。
在试验区使用Seabat8101多波束测深系统进行水深测量,沿航道轴线方向布设16条测线,测线间距以保证多波束测深全覆盖为准。分别使用GPS PPK实测潮位和传统验潮数据进行潮位改正,以验证两种潮位改正方式的符合程度。
5.2 使用PPK潮位改正后的数据,不同时间完成的相邻测线搭接效果良好:
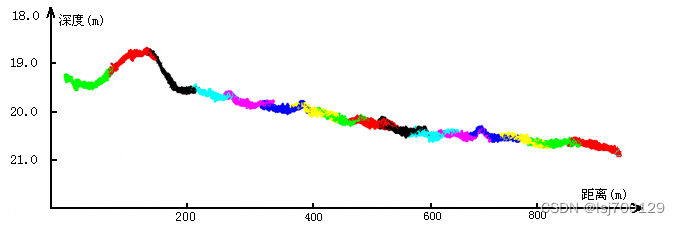
图4 相邻测线搭接效果
Fig.4 Overlap effect of neighboring survey lines
5.3 使用不同潮位改正方式的数据不符情况
分别利用PPK潮位和传统验潮潮位对试验区测量数据进行改正,按照5 m×5 m大小输出格网数据,对两种潮位改正方式的水深较差进行统计,以判定GPS PPK潮位改正的精度。参加比对节点数据共67225个,不符值标准差SD=0.04 m,不符值位于-0.1~0.1 m区间的点数占比为98.64%,二者之间具有良好的一致性:
表3 不符值统计表
Tab.3 Discrepancies value of statistics
| 序号 | 不符值分布 | 点数 | 所占比例 |
| -0.3<d≤-0.2 | 3 | 0.01% | |
| 2 | -0.2<d≤-0.1 | 607 | 0.90% |
| 3 | -0.1<d≤0 | 39527 | 58.80% |
| 4 | 0<d≤0.1 | 26568 | 39.52% |
| 5 | 0.1<d≤0.2 | 518 | 0.77% |
| 6 | 0.2<d≤0.3 | 2 | 0.00% |
| 合计 | 67225 | 100% | |
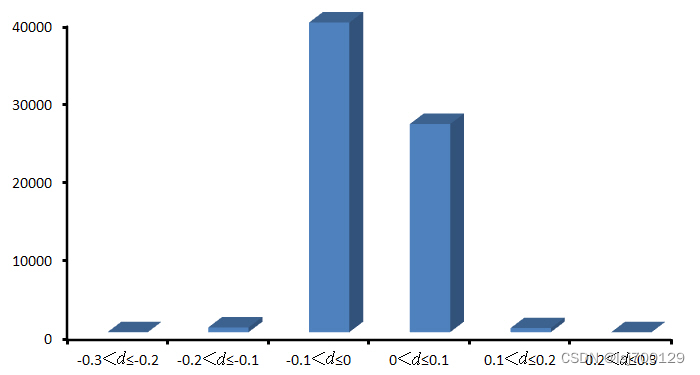
图5 比对不符值分布图
Fig.5 Map of discrepancies value
6 结束语
6.1 GPS PPK潮位测量的局限性:
(1)潮位测量过程中无法对GPS采集数据的质量进行实时监控,需通过一些质量控制手段来保证数据采集的质量;
(2)GPS PPK定位技术虽然相对GPS RTK提高了作用距离,不再受无线电传播距离的影响,但仍受局域差分误差相关假设的局限,定位误差将随作用距离的增大而增大。
6.2 应用前景
GPS PPK在航潮位测量成果为实测潮位,其高精度和高可靠性的特点对于疏浚工程来说具有重要意义,可在控制超挖、减少废方等方面起到很大作用。作为GPS PPK测量在疏浚工程测量方面的创造性应用,本文为大型航道疏浚工程的潮位控制提供了一种切实可行的手段,可以解决远距离潮位无法有效控制的行业难题,在今后超长航道的疏浚工程测量方面具有广阔的应用前景。















 2379
2379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









