







一、状态
动态系统的状态说明粗略的说是指系统的过去、现在和将来的动态变换情况。
比如:运动的小车的状态可以为位置和速度。
二、系统变量
2.1 状态变量
系统的状态变量,就是指足以完全确定系统运动状态的最小一组变量。一个用n阶微分方程描述的系统,就有n个独立变量,求的这n个独立变量的时间相应,系统的运动状态也就被揭示无疑了。因此,可以说系统的状态变量就是n阶系统的n个独立变量。
设
x
1
(
t
)
,
x
2
(
t
)
,
.
.
.
,
x
n
(
t
)
x_1(t), x_2(t), ... ,x_n(t)
x1(t),x2(t),...,xn(t)为系统的一组状态变量,则它应该满足下列两个条件:
(1)在任何时刻
t
=
t
0
t=t_0
t=t0,这组变量的值
x
1
(
t
0
)
,
x
2
(
t
0
)
,
.
.
.
,
x
n
(
t
0
)
x_1(t_0), x_2(t0), ... ,x_n(t_0)
x1(t0),x2(t0),...,xn(t0)都在表示该时刻的状态。
(2)当系统
t
>
t
0
t>t_0
t>t0的输入和上述初始状态确定,状态变量便能完全确定系统在任何
t
>
t
0
t>t_0
t>t0时刻的行为。
2.2 状态变量的选取
同一个系统,究竟选取的哪些变量可以作为状态变量,这不是唯一的,要紧的这些变量是相互独立的,其个数等于微分方程的阶数。
三、状态向量
如果完全一个系统的动态行为需要n个状态变量,那么这n个变量
x
1
(
t
)
,
x
2
(
t
)
,
.
.
.
,
x
n
(
t
)
x_1(t),x_2(t),...,x_n(t)
x1(t),x2(t),...,xn(t)作为分量所构成的向量就叫做系统的状态向量。记作
x
=
[
x
1
(
t
)
x
2
(
t
)
.
.
x
n
(
t
)
]
x=\begin{equation} \begin{bmatrix} x_1(t) \\ x_2(t)\\ .\\ .\\ x_n(t) \end{bmatrix} \end{equation}
x=
x1(t)x2(t)..xn(t)
通过构建状态向量,将实际带有物理意义的状态变量转化为n空间的一个坐标,便于观察状态变量随时间变化的规律。
四、状态空间
以状态变量 x 1 ( t ) , x 2 ( t ) , . . . , x n ( t ) x_1(t),x_2(t),...,x_n(t) x1(t),x2(t),...,xn(t)为坐标构成的n维空间,称为状态空间。
以系统的任何状态,都可以用状态空间中的一个点来表示。即在特定时刻t状态向量x(t)在状态空间中是一个点。已知初始时刻 x ( t 0 ) x(t_0) x(t0),就得到状态空间中的一个初始点。随着时间的推移,x(t)在空间中绘出一条轨迹,称为状态轨线。
显然,状态轨线的形状,完全由系统 t 0 t_0 t0时刻初始状态。
五、状态方程
描述状态方程与系统输入之间关系的一阶微分方程组称为状态方程。
一个实例:下中,若令 x 1 = y x_1=y x1=y, x 2 = d y d t x_2=\frac{dy}{dt} x2=dtdy,即取 x 1 , x 2 x_1, x_2 x1,x2为此系统的一组状态变量,则由牛顿第二定律 M d 2 y d t 2 = u − k d y d t M\frac{d^2y}{dt^2}=u-k\frac{dy}{dt} Mdt2d2y=u−kdtdy得到一阶微分方程。
{
d
x
1
d
t
=
d
y
d
t
=
x
2
d
x
2
d
t
=
d
2
y
d
t
2
=
−
k
M
d
y
d
t
+
1
M
u
=
−
k
M
x
2
+
1
M
u
\begin{equation} \left\{ \begin{aligned} \frac{dx_1}{dt} & = \frac{dy}{dt}=x_2 \\ \frac{dx_2}{dt}=\frac{d^2y}{dt^2} =-\frac{k}{M}\frac{dy}{dt}+\frac{1}{M}u=-\frac{k}{M}x_2+\frac{1}{M}u \end{aligned} \right. \end{equation}
⎩
⎨
⎧dtdx1dtdx2=dt2d2y=−Mkdtdy+M1u=−Mkx2+M1u=dtdy=x2
将方程组转为矩阵形式表示:
[
x
1
˙
x
2
˙
]
=
[
0
1
0
−
k
M
]
[
x
1
x
2
]
+
[
0
1
M
]
u
\begin{equation} \begin{bmatrix} \dot{x_1} \\ \dot{x_2} \end{bmatrix} = \begin{bmatrix} 0 & 1 \\ 0 & -\frac{k}{M} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} + \begin{bmatrix} 0 \\ \frac{1}{M} \end{bmatrix} u \end{equation}
[x1˙x2˙]=[001−Mk][x1x2]+[0M1]u
即:
x
˙
=
A
x
+
b
u
\dot{x}=Ax+bu
x˙=Ax+bu
六、输出方程
这里放入要修改的文字
描述系统的状态变量与输出关系的一组代数方程被称为输出方程。对于上面的例子,我们的输出方程为:
y
=
[
1
0
]
[
x
1
x
2
]
y=[1 \ \ 0]\begin{equation} \begin{bmatrix} x_1 \\ x_2\\ \end{bmatrix} \end{equation}
y=[1 0][x1x2]
简写为:
y
=
c
T
x
y=c^T x
y=cTx,其中
c
T
=
[
1
0
]
c^T=[1\ 0]
cT=[1 0],
x
=
[
x
1
,
x
2
]
′
x=[x_1,x_2]'
x=[x1,x2]′
七、状态空间描述
状态方程和输出方程一同构建一个动态系统的完整描述,称为系统的状态空间表达式,也称为状态空间描述。对于一般的输入,状态方程和输出方程为:
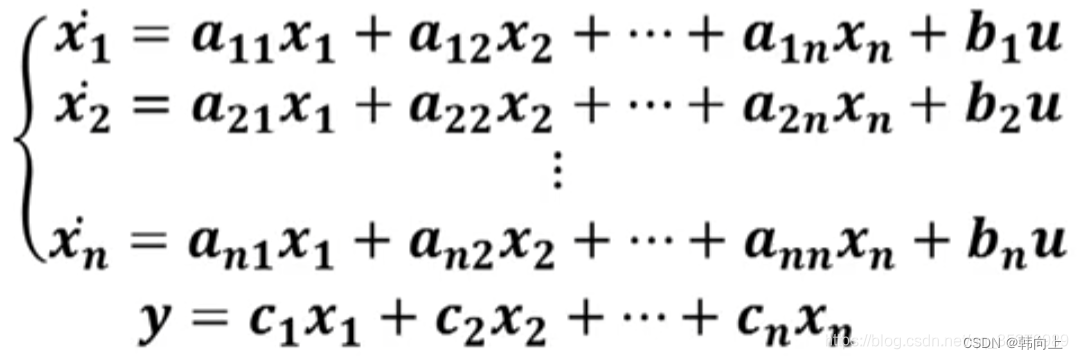
用向量矩阵表示的状态空间表达方式为:
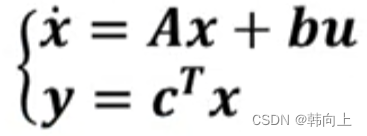
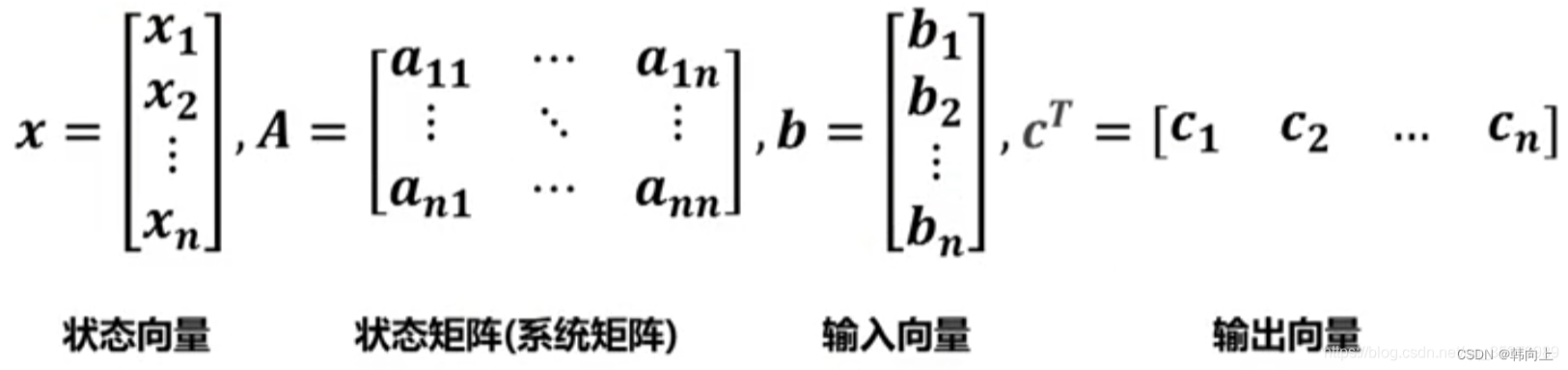
其中:















 4570
4570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









