






 本文探讨了电驱动车辆中主动前轮转向(AFS)和主动后轮转向(ARS)的仿真搭建,重点介绍基于LQR控制的AFS系统设计。通过Matlab/Simulink模拟,优化车辆动态特性,提升行驶稳定性和操控性能,预示着该技术在未来电动汽车中的重要应用。
本文探讨了电驱动车辆中主动前轮转向(AFS)和主动后轮转向(ARS)的仿真搭建,重点介绍基于LQR控制的AFS系统设计。通过Matlab/Simulink模拟,优化车辆动态特性,提升行驶稳定性和操控性能,预示着该技术在未来电动汽车中的重要应用。
电驱动车辆主动前轮转向(AFS)、主动后轮转向(ARS)的仿真搭建、控制
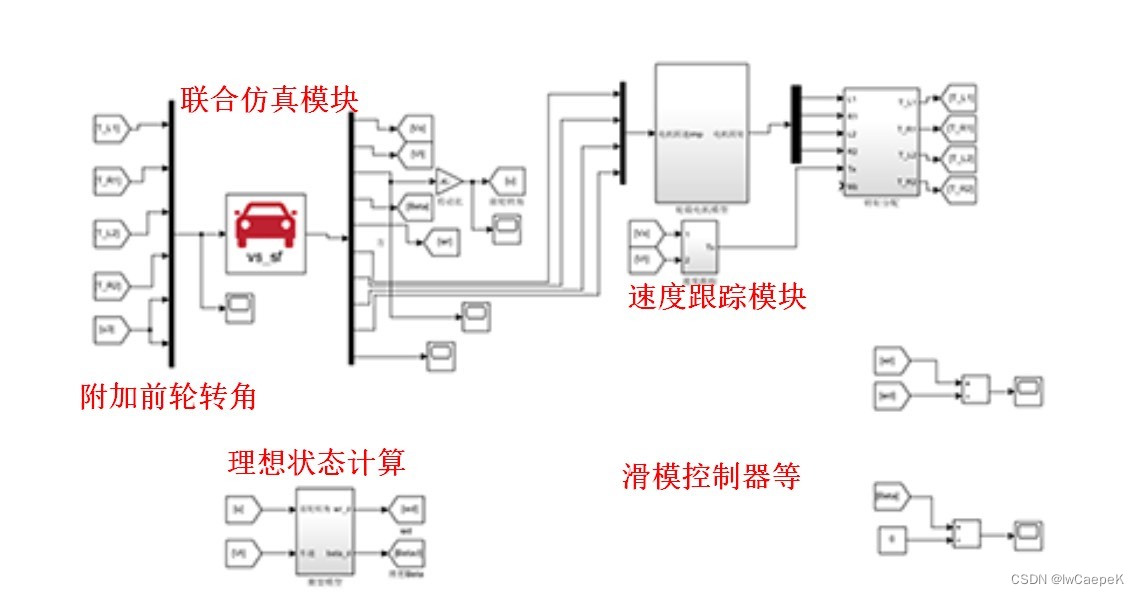
以轮毂电机四轮驱动车辆为例进行设计,根据横摆角速度和质心侧偏角的偏差计算出维持车辆稳定性所需的附加前轮转角。
控制方法:滑模控制、LQR控制、PID控制(发其中一个,默认发lqr控制器)
电驱动车辆主动前轮转向(AFS)、主动后轮转向(ARS)的仿真搭建、控制
随着电动车辆的普及和发展,为了提高行驶稳定性和操控性能,越来越多的电动车辆开始采用主动转向系统,其中主动前轮转向(Active Front Steering,AFS)和主动后轮转向(Active Rear Steering,ARS)成为主流技术。本文以轮毂电机四轮驱动车辆为例,探讨了基于LQR控制的主动前轮转向系统的仿真搭建和控制方法。
首先,本文介绍了电驱动车辆的特性和主动转向系统的工作原理。电驱动车辆能够实现四轮独立驱动,提供更高的驱动力矩和悬挂力矩,从而为主动转向系统的实现提供了强大的支持。主动转向系统通过控制前轮或后轮的转向角度,使得车辆在行驶过程中更加稳定和灵活。
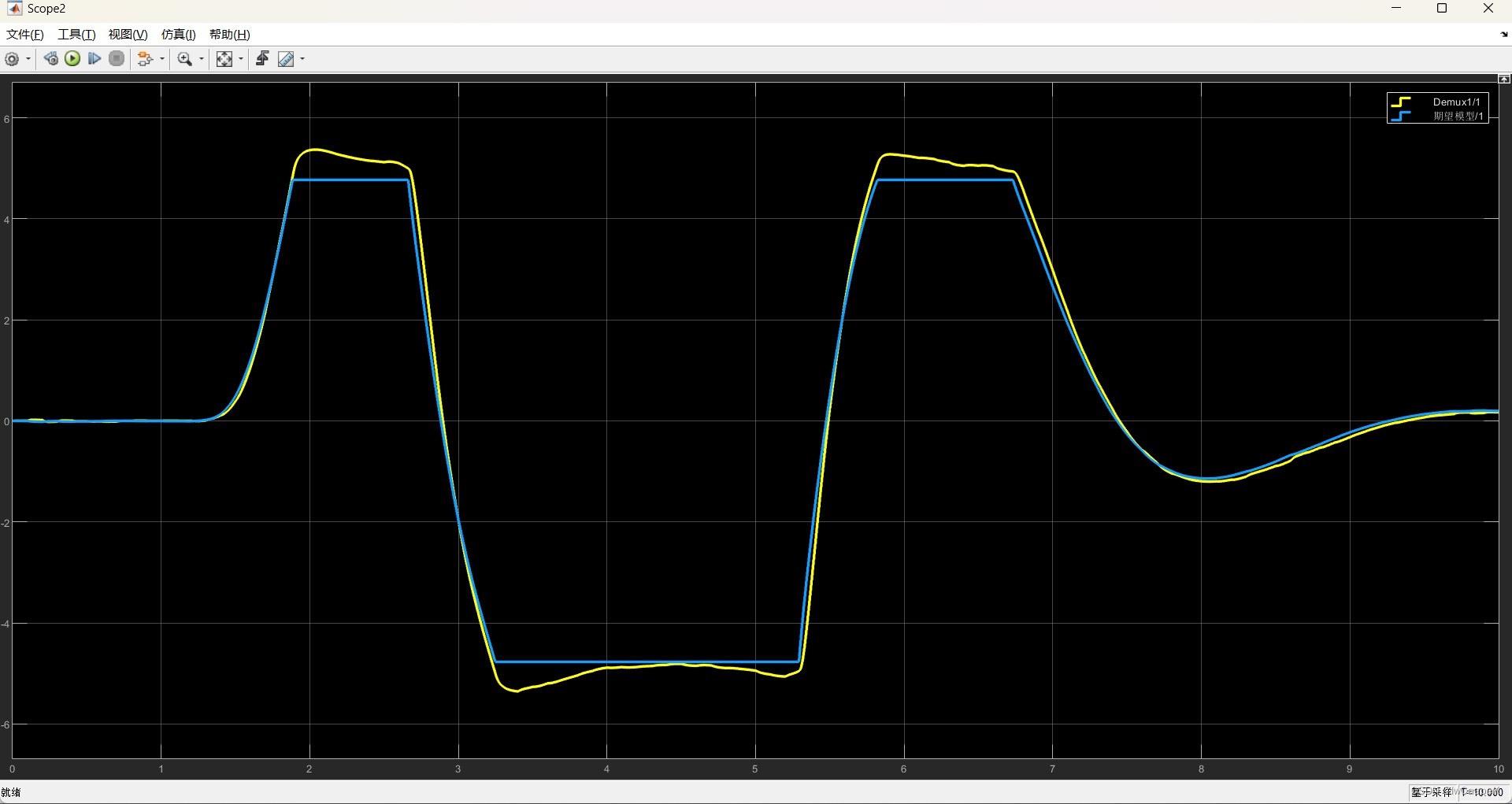
接着,本文详细介绍了基于LQR控制的主动前轮转向系统的设计和控制方法。LQR控制是一种经典的线性二次调节控制方法,其通过设计状态反馈矩阵和输入矩阵,使得车辆的横摆角速度和质心侧偏角的偏差能够收敛到设定的目标值。该控制方法具有稳定性好、控制性能优秀等特点,因此被广泛应用于车辆控制系统中。
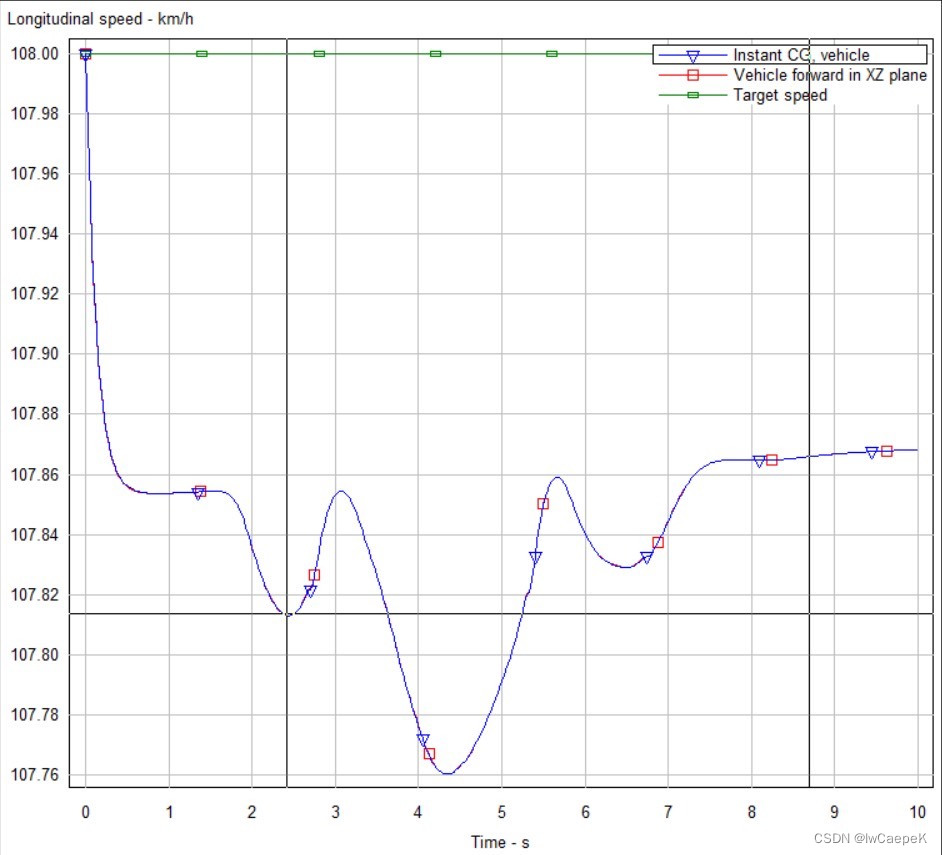
在仿真搭建方面,本文采用Matlab/Simulink软件进行系统建模和仿真。首先,建立了包括车辆动力学模型、动力系统模型和转向系统模型的整体模型。然后,根据横摆角速度和质心侧偏角的偏差,利用LQR控制方法计算出需要的附加前轮转角。最后,通过对模型进行数值仿真和性能评估,验证了主动前轮转向系统的控制效果和优势。
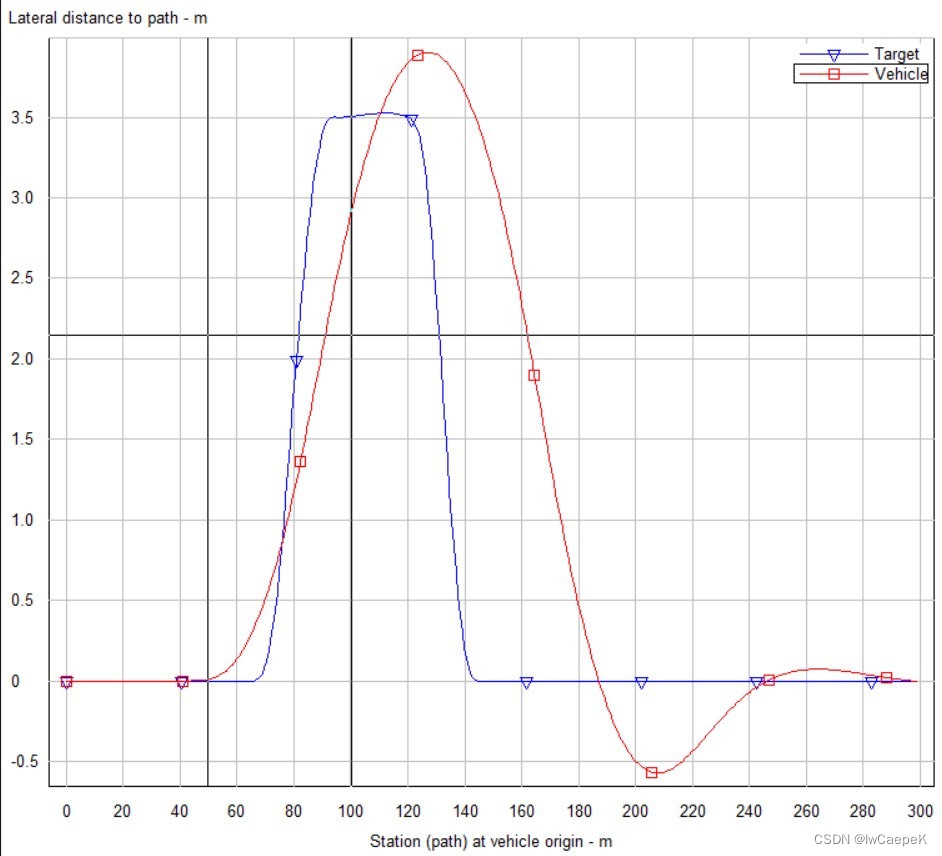
实验结果表明,基于LQR控制的主动前轮转向系统能够有效提高电驱动车辆的稳定性和操控性能。通过对车辆动态特性的优化调节,系统能够减小横摆角速度和质心侧偏角的偏差,使得车辆在高速行驶和紧急转向时更加稳定和安全。同时,该系统还能够根据不同的行驶状态和路面情况进行动态调整,提高驾驶员的驾驶舒适性和驾驶体验。
综上所述,本文通过对电驱动车辆主动前轮转向系统的仿真搭建和LQR控制方法的探讨,展示了这一技术在提高车辆稳定性和操控性能方面的优势和应用前景。随着电动车辆的普及和发展,主动转向系统将在未来的汽车行业中发挥更加重要的作用,为驾驶员提供更加安全和舒适的驾驶体验。同时,本文的方法和研究思路也可为其他类型的主动转向系统的设计和控制提供参考和借鉴。
相关代码,程序地址:http://imgcs.cn/lanzoun/756310608018.html

















 687
687

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









