







 本文介绍了如何使用MatlabSimulink在轮毂电机驱动的电动汽车中实施主动前轮转向控制,以提升行驶稳定性。通过7自由度整车模型和滑模控制算法,提供了不同控制方案的选择及其价格。Simulink源码、建模文档和参考资料适用于动力学建模和控制算法学习者。
本文介绍了如何使用MatlabSimulink在轮毂电机驱动的电动汽车中实施主动前轮转向控制,以提升行驶稳定性。通过7自由度整车模型和滑模控制算法,提供了不同控制方案的选择及其价格。Simulink源码、建模文档和参考资料适用于动力学建模和控制算法学习者。
汽车操稳性控制,主动前轮转向控制,AFS
软件使用:Matlab Simulink
适用场景:轮毂电机分布式驱动电动汽车主动前轮转向控制(AFS),可实现多种工况下整车行驶稳定性。
产品simulink源码包含如下模块(拿后时选取一种搭配即可):
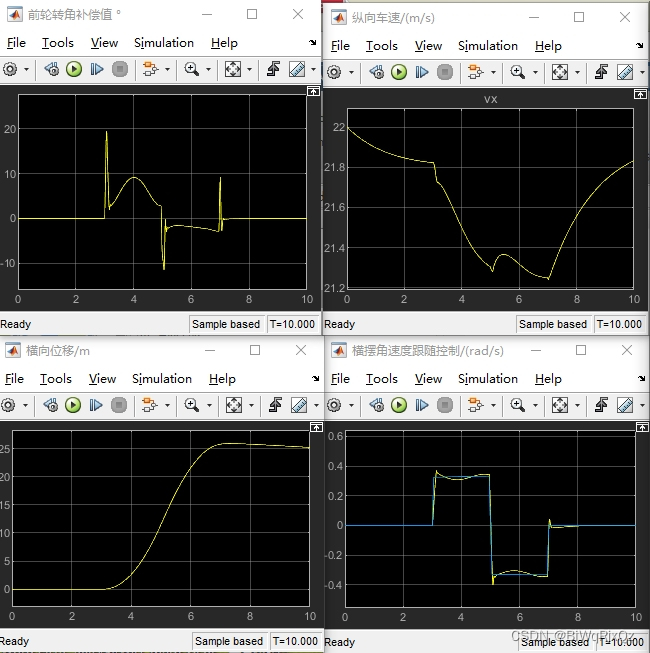
→整车模块:7自由度整车模型
→控制器:滑模控制
→控制规律:横摆角速度跟随控制,+质心侧偏角联合控制(包括两个模块)
方式:客户可选择多种控制规律。
不同选择price有差异。
例如可选择7自由度整车模块+滑模控制+横摆角速度跟随控制方案,该方案为基础款,一般增加一种方案每个模块需要额外加price
包含:simulink源码文件,详细建模说明文档,对应参考资料
适用于需要或想学习整车动力学simulink建模,以及simulink控制算法建模的朋友。
模型运行完全OK
汽车操稳性控制是现代汽车技术中非常重要的一个方面,它对车辆的行驶稳定性起到关键的作用。主动前轮转向控制是一种常用的汽车操稳性控制方法,通过对前轮转向角度的主动调节,可以改变车辆的操纵性能,提高车辆的行驶稳定性。
在轮毂电机分布式驱动电动汽车中,主动前轮转向控制技术得到了广泛的应用。该技术通过控制前轮的转向角度,可以在不同的工况下实现整车的行驶稳定性。为了实现主动前轮转向控制,我们可以使用Mat
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1557
1557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









