







 该文介绍了如何使用Cubemx配置STM32定时器进行正交解码模式设置,以实现电机编码器脉冲检测。通过配置RCC、SYS、串口和定时器的EncoderMode,结合HAL库在keil5中编写代码,实现了计数和判断转动方向的功能。在while(1)循环中,通过HAL库函数读取并打印编码器脉冲数和转动方向。
该文介绍了如何使用Cubemx配置STM32定时器进行正交解码模式设置,以实现电机编码器脉冲检测。通过配置RCC、SYS、串口和定时器的EncoderMode,结合HAL库在keil5中编写代码,实现了计数和判断转动方向的功能。在while(1)循环中,通过HAL库函数读取并打印编码器脉冲数和转动方向。
STM32定时器的正交解码模式多用于检测电机的编码器脉冲数做闭环控制,如PID。本文简单介绍一下定时器在Cubemx如何配置以及程序引用到的API函数。
一、前期准备
1、硬件:
- STM32C8T6最小系统板
- USB-TTL串口模块
- ST-Link下载器
2、软件:
- keil5-IDE
- cubeMX
二、cubeMX配置
1、配置RCC——选着外部时钟源

2、配置SYS—— Serial Wire模式

3、时钟树拉满72M

4、配置串口1

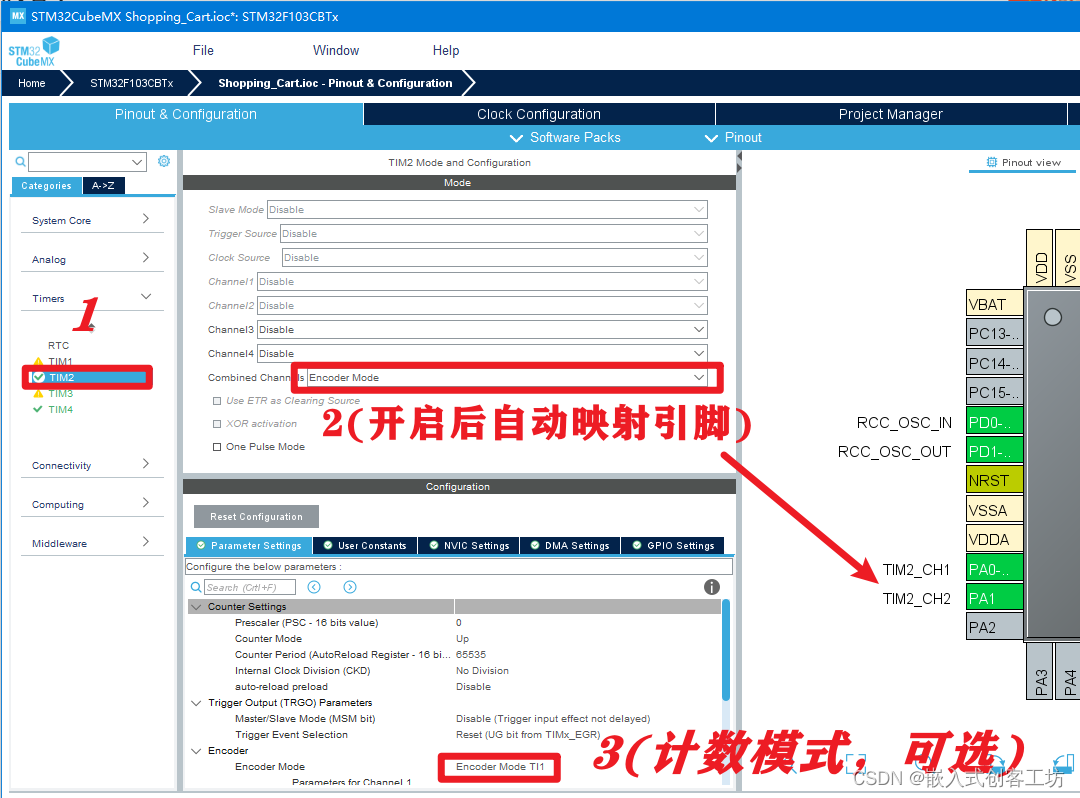
5.编码器模式配置
- 这里配置哪一个定时器都可以,只要在第2步存在 Encoder Mode 选项即可。
- 第3步Encoder Mode T1 是只计上升沿,Encoder Mode T2是只计下降沿,Encoder Mode T1 and T2 就是2种都计。注意:此处可分别配置2个通道的触发模式,但截图只截到其中一个通道
6.生成工程
略
三、keil5代码
1、串口配置
可以参考:STM32系列(HAL库) ——使用串口打印的3种方式,推荐第二种方法。
2、main函数
①在while(1)循环前添加初始化
uint16_t Count=0;
uint16_t Diretion=0;
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
②在whlie(1)循环中打印方向和计数值
Diretion = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim2);
Count = __HAL_TIM_GET_COUNTER(&htim2);
printf("转动方向:%d 脉冲数:%d \r\n",Diretion,Count );
HAL_delay(500);- __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim2):返回 0 或 1 ,代表转动方向
- __HAL_TIM_GET_COUNTER(&htim2):返回计数脉冲值
- 如果想看相同时间间隔的脉冲值,可在获得计数后使用 TIM2->CNT=0; 语句将定时器计数值清零。默认情况下定时器会计满65535后变成0


















 1052
1052

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











