




 本文介绍了无人机倾斜摄影建模的基础知识,包括重叠度(航向与旁向)、航线弯曲和像片旋角的定义与要求。探讨了不同场景下重叠度设置的优化方案,如地面、高楼、高处和低处起飞的考虑。并讨论了分辨率、比例尺、DPI与模型精度的换算关系,提供了“S”形、环形和高低组合的建模航线参考。
本文介绍了无人机倾斜摄影建模的基础知识,包括重叠度(航向与旁向)、航线弯曲和像片旋角的定义与要求。探讨了不同场景下重叠度设置的优化方案,如地面、高楼、高处和低处起飞的考虑。并讨论了分辨率、比例尺、DPI与模型精度的换算关系,提供了“S”形、环形和高低组合的建模航线参考。
在做正射影像或者倾斜建模过程中会涉及到一些摄影测量和倾斜建模有关一些知识,顺便查了一些资料,然后觉得很有必要,就稍微系统罗列了一下,在最后还提供了几个建模航线为大家作为参考,希望对大家有帮助。
一、重叠度、航线弯曲、像片旋角。
1.1航向重叠率

沿同一航线的相邻像片重叠部分的长度与像片边长之比。简而言之,就是同一条线路,照片与照片之间的重叠部分。
1.2旁向重叠度

沿两条相邻航线所摄的相邻像片重叠部分的长度与像片长度之比。简而言之,就是线路与线路之间照片的重叠部分。
制作正射影像图,对于照片的重叠率是有一定的要求的,照片至少有60%的航向和旁向重叠率,这样能保证三张照片有重叠部分。这是对于相对于地形较为平坦的地区,当地形起伏较大时,在设置重叠率时还要提高,才能保证像片立体量测与拼接的需要
1.3航线弯曲
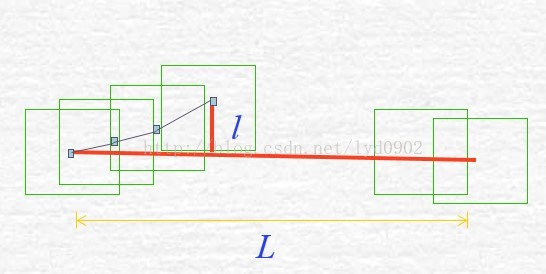
在航拍过程中,由于无人机稳定程度不如有人驾驶飞机,易受高空风力影响,会导致航线漂移,飞行的轨迹不再像传统的航空摄影沿直线飞行,会产生航线弯曲现象。所谓航线弯曲就是把一条航线的航摄像片根据地物影像拼接起来,各张像片的主点连线不在一条直线上,而呈现为弯弯曲曲的折线
航线弯曲度:航线最大弯曲矢量与航线长度之比的百分数。要求航线弯曲度<3%
1.4像片旋角
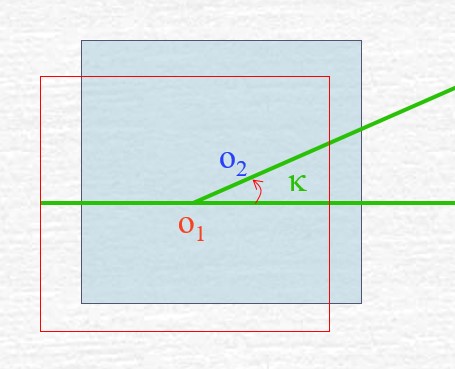
一张像片上相邻主点连线与同方向框标连线间的夹角。要求像片旋角<6°
敲黑板!敲黑板!敲黑板!
总结一下:
1) 像片重叠率建议60%以上,地形起伏越大重叠率越高。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









