







文章目录
1.创建工作空间
在主文件夹下新建一个文件夹, 命名为catkin_urdf
进入该文件夹, 再创建一个src文件夹, 并在src文件夹里运行ROS的工作空间初始化命令catkin_init_workspace
回到catkin_urdf文件夹, 使用catkin_make编译整个工作空间
最后, 打开终端, 输入echo "source ~/catkin_urdf/devel/setup.bash" >> ~/.bashrc, 设置环境变量
2.创建功能包
在catkin_urdf下的src里运行
catkin_create_pkg mrobot_description urdf xacro
进入mrobot_description文件夹, 新建urdf、meshes、launch、config四个文件夹, 用来存放文件, 效果如图所示:
3.urdf文件
在mrobot_description包的urdf文件夹下新建三个xacro文件, 其中的内容如下:
注意: 代码中不要含有中文的注释
mrobot_body.urdf.xacro
<?xml version="1.0" ?>
<robot name="mrobot_body" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:property name="M_PI" value="3.14159"/>
<xacro:property name="wheel_radius" value="0.033"/>
<xacro:property name="wheel_length" value="0.017"/>
<xacro:property name="base_radius" value="0.13"/>
<xacro:property name="base_length" value="0.005"/>
<xacro:property name="motor_radius" value="0.02"/>
<xacro:property name="motor_length" value="0.08"/>
<xacro:property name="motor_x" value="0.055"/>
<xacro:property name="motor_y" value="0.075"/>
<xacro:property name="plate_height" value="0.07"/>
<xacro:property name="standoff_x" value="0.12"/>
<xacro:property name="standoff_y" value="0.1"/>
<!-- Defining the colors used in this robot -->
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
<material name="gray">
<color rgba="0.75 0.75 0.75 1"/>
</material>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
<link name="base_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow"/>
</visual>
<inertial>
<mass value="2"/>
<origin xyz="0 0 0.0"/>
<inertia ixx="0.01" ixy="0" ixz="0"
iyy="0.01" iyz="0"
izz="0.5"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
</link>
<joint name="base_left_motor_joint" type="fixed">
<origin xyz="${-1 * motor_x} ${motor_y} 0" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_motor"/>
</joint>
<link name="left_motor">
<visual>
<origin xyz="0 0 0" rpy="${M_PI / 2} 0 0"/>
<geometry>
<cylinder radius="${motor_radius}" length="${motor_length}"/>
</geometry>
<material name="gray"/>
</visual>
<inertial>
<origin xyz="0.0 0 0"/>
<mass value="0.1"/>
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0"
izz="0.001"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0"/>
<geometry>
<cylinder radius="${motor_radius}" length="${motor_length}"/>
</geometry>
</collision>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 ${(motor_length + wheel_length) / 2} 0" rpy="0 0 0"/>
<parent link="left_motor"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI / 2} 0 0"/>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}"/>
</geometry>
<material name="white"/>
</visual>
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0"
izz="0.001" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
</link>
<joint name="base_right_motor_joint" type="fixed">
<origin xyz="${-1 * motor_x} ${-1 * motor_y} 0" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_motor"/>
</joint>
<link name="right_motor">
<visual>
<origin xyz="0 0 0" rpy="${M_PI / 2} 0 0"/>
<geometry>
<cylinder radius="${motor_radius}" length="${motor_length}"/>
</geometry>
<material name="gray"/>
</visual>
<inertial>
<origin xyz="0.0 0 0"/>
<mass value="0.1" />
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0"
izz="0.001" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${motor_radius}" length = "${motor_length}"/>
</geometry>
</collision>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 ${ (wheel_length + motor_length) / (-2) } 0" rpy="0 0 0"/>
<parent link="right_motor"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI / 2} 0 0"/>
<geometry>
<cylinder radius="${wheel_radius}" length="${wheel_length}"/>
</geometry>
<material name="white"/>
</visual>
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.01" />
<inertia ixx="0.001" ixy="0.0" ixz="0.0"
iyy="0.001" iyz="0.0"
izz="0.001" />
</inertial>
<collision>
<origin xyz="0 0 0" rpy="${M_PI/2} 0 0" />
<geometry>
<cylinder radius="${wheel_radius}" length = "${wheel_length}"/>
</geometry>
</collision>
</link>
<joint name="front_caster_joint" type="fixed">
<origin xyz="${base_radius - wheel_radius / 2} 0 -${wheel_radius / 2}" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="${M_PI / 2} 0 0"/>
<geometry>
<sphere radius="${wheel_radius / 2}"/>
</geometry>
<material name="black"/>
</visual>
<inertial>
<origin xyz="0 0 0"/>
<mass value="0.001"/>
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001"/>
</inertial>
<collision>
<origin xyz="0 0 0.01" rpy="${M_PI/2} 0 0"/>
<geometry>
<sphere radius="${wheel_radius/2}"/>
</geometry>
</collision>
</link>
<!-- the supportColumn -->
<xacro:macro name="support_column" params="parent number x_loc y_loc z_loc">
<joint name="support_column_${number}_joint" type="fixed">
<origin xyz="${x_loc} ${y_loc} ${z_loc}" rpy="0 0 0"/>
<parent link="${parent}"/>
<child link="support_column_${number}_link"/>
</joint>
<link name="support_column_${number}_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.01 0.01 0.07"/>
</geometry>
<material name="black"/>
</visual>
<interial>
<mass value="0.001"/>
<origin xyz="0 0 0"/>
<interia ixx="0.0001" ixy="0" ixz="0"
iyy="0.0001" iyz="0"
izz="0.0001"/>
</interial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.01 0.01 0.07"/>
</geometry>
</collision>
</link>
</xacro:macro>
<!-- the supportPlate -->
<xacro:macro name="support_plate" params="parent number height">
<joint name="support_plate_${number}_joint" type="fixed">
<origin xyz="0 0 ${height}" rpy="0 0 0"/>
<parent link="${parent}"/>
<child link="support_plate_${number}_link"/>
</joint>
<link name="support_plate_${number}_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
<material name="yellow"/>
</visual>
<inertial>
<mass value="2"/>
<origin xyz="0 0 0.0"/>
<inertia ixx="0.01" ixy="0" ixz="0"
iyy="0.01" iyz="0"
izz="0.5"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="${base_length}" radius="${base_radius}"/>
</geometry>
</collision>
</link>
</xacro:macro>
<!-- create 4 supportColumns (1) -->
<support_column parent="base_link" number="1" x_loc="-${standoff_x / 2 + 0.03}" y_loc="-${standoff_y - 0.03}"
z_loc="${plate_height / 2}"/>
<support_column parent="base_link" number="2" x_loc="-${standoff_x / 2 + 0.03}" y_loc="${standoff_y - 0.03}"
z_loc="${plate_height / 2}"/>
<support_column parent="base_link" number="3" x_loc="${standoff_x / 2}" y_loc="-${standoff_y}"
z_loc="${plate_height / 2}"/>
<support_column parent="base_link" number="4" x_loc="${standoff_x / 2}" y_loc="${standoff_y}"
z_loc="${plate_height / 2}"/>
<!-- create 4 supportColumns (2) -->
<support_column parent="base_link" number="5" x_loc="-${standoff_x / 2 + 0.03}" y_loc="-${standoff_y - 0.03}"
z_loc="${1.5 * plate_height + base_length}"/>
<support_column parent="base_link" number="6" x_loc="-${standoff_x / 2 + 0.03}" y_loc="${standoff_y - 0.03}"
z_loc="${1.5 * plate_height + base_length}"/>
<support_column parent="base_link" number="7" x_loc="${standoff_x / 2}" y_loc="-${standoff_y}"
z_loc="${1.5 * plate_height + base_length}"/>
<support_column parent="base_link" number="8" x_loc="${standoff_x / 2}" y_loc="${standoff_y}"
z_loc="${1.5 * plate_height + base_length}"/>
<!-- create 2 SupportPlates -->
<support_plate parent="base_link" number="1" height="${plate_height + base_length}"/>
<support_plate parent="base_link" number="2" height="${2 * plate_height + 1.5 * base_length}"/>
</robot>
rplidar.xacro
<?xml version="1.0" ?>
<robot name="laser" xmlns:xacro="http://www.ros.org/wiki/xacro">
<xacro:macro name="rplidar" params="prefix:=laser">
<link name="${prefix}_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.05" radius="0.05" />
</geometry>
<material name="black"/>
</visual>
<inertial>
<mass value="0.1"/>
<origin xyz="0 0 0"/>
<inertia ixx="0.01" ixy="0" ixz="0"
iyy="0.01" iyz="0"
izz="0.01"/>
</inertial>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
</collision>
</link>
</xacro:macro>
</robot>
mrobot_with_rplidar.urdf.xacro
<?xml version="1.0" ?>
<robot name="mrobot" xmlns:xacro="http://www.ros.org/wiki/xacro" >
<xacro:include filename="$(find mrobot_description)/urdf/mrobot_body.urdf.xacro"/>
<xacro:include filename="$(find mrobot_description)/urdf/rplidar.xacro"/>
<xacro:property name="rplidar_offset_x" value="0"/>
<xacro:property name="rplidar_offset_y" value="0"/>
<xacro:property name="rplidar_offset_z" value="0.028"/>
<mrobot_body/>
<!-- rplidar -->
<joint name="rplidar_joint" type="fixed">
<origin xyz="${rplidar_offset_x} ${rplidar_offset_y} ${rplidar_offset_z}" rpy="0 0 0"/>
<parent link="support_plate_2_link"/>
<child link="laser_link"/>
</joint>
<xacro:rplidar prefix="laser"/>
</robot>
4.launch文件
在mrobot_description包的launch文件夹下新建一个launch文件, 命名为
with_rplidar.launch, 其中的内容如下:
<launch>
<param name="use_gui" value="true"/>
<node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_description)/config/mrobot_urdf.rviz" required="true" />
<!-- xacro ===> urdf rplidar -->
<arg name="model" default="$(find xacro)/xacro --inorder '$(find mrobot_description)/urdf/mrobot_with_rplidar.urdf.xacro' "/>
<param name="robot_description" command="$(arg model)" />
</launch>
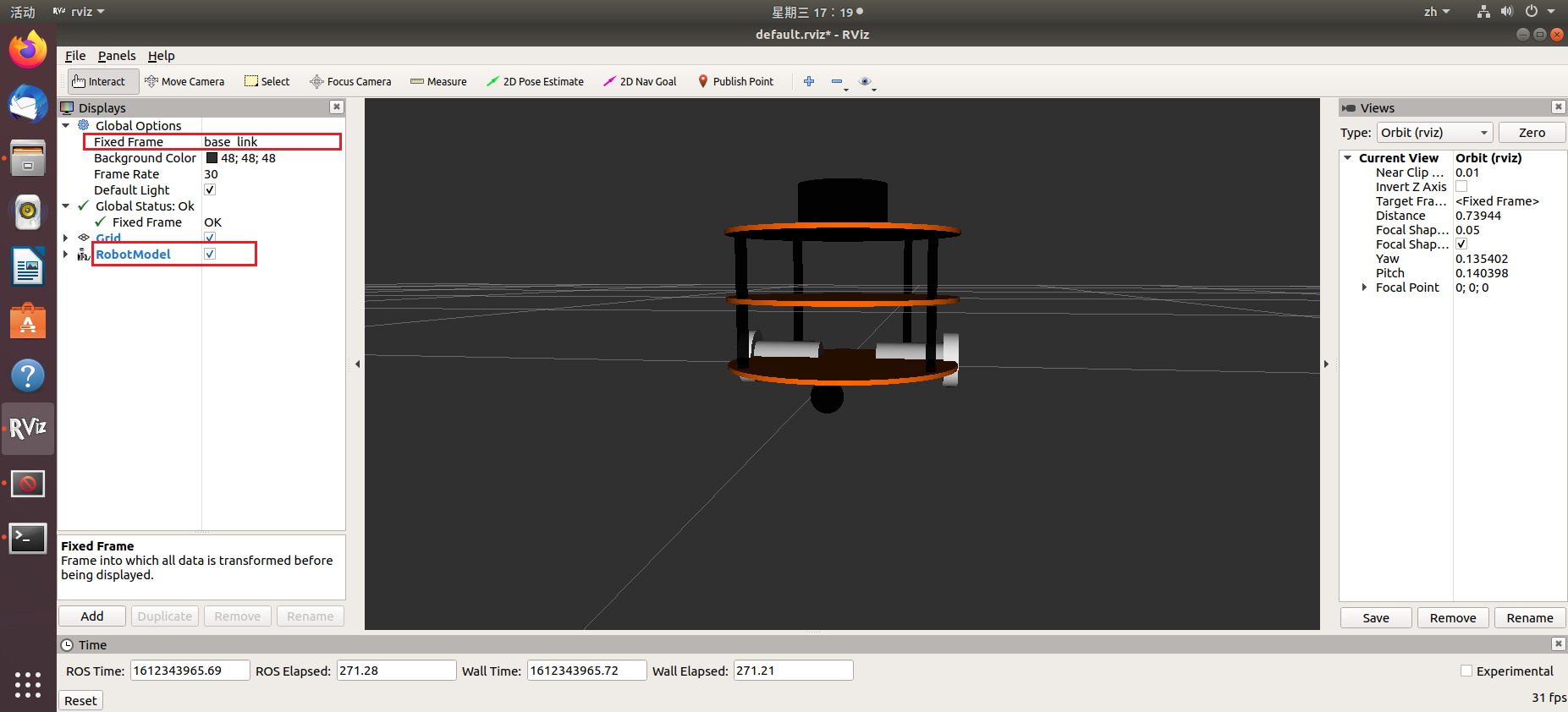
5.运行rviz
直接在终端输入下面的命令, 并在rviz软件中, 将Fixed Frame设置为base_link, 然后添加RobotModel, 即可在rviz中看到安装有激光雷达的机器人模型
roslaunch mrobot_description with_rplidar.launch














 1902
1902











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









