






库的依赖部分EIGEN,PCL,ROS很常规这个就不赘述了,如果想看建议去看
【SLAM学习】FAST-LIO配置_Q小鑫的博客-CSDN博客
这个框架不一样的地方在于依赖了某个品牌的激光
所以需要
先安装SDK
git clone https://github.com/Livox-SDK/Livox-SDK.git
cd Livox-SDK
cd build
cmake ..
make
sudo make install再安装
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
cd ws_livox
catkin_make
source devel/setup.bash这时候准备工作就完成了,非常顺利
然后去下个fastlio
https://github.com/hku-mars/FAST_LIO
子模块的加载有
git submodule update --init我没这么玩,因为这个脚本我看了下就是去
[submodule "include/ikd-Tree"]
path = include/ikd-Tree
url = https://github.com/hku-mars/ikd-Tree.git
branch = fast_lio该地址的分支下面下一个头文件和cpp放到工程的path下面
后面就没什么了直接 catkin_make编译后,然后运行
roslaunch livox_ros_driver livox_lidar_msg.launch记住把对应的launch中的path开关打开.
具体的效果
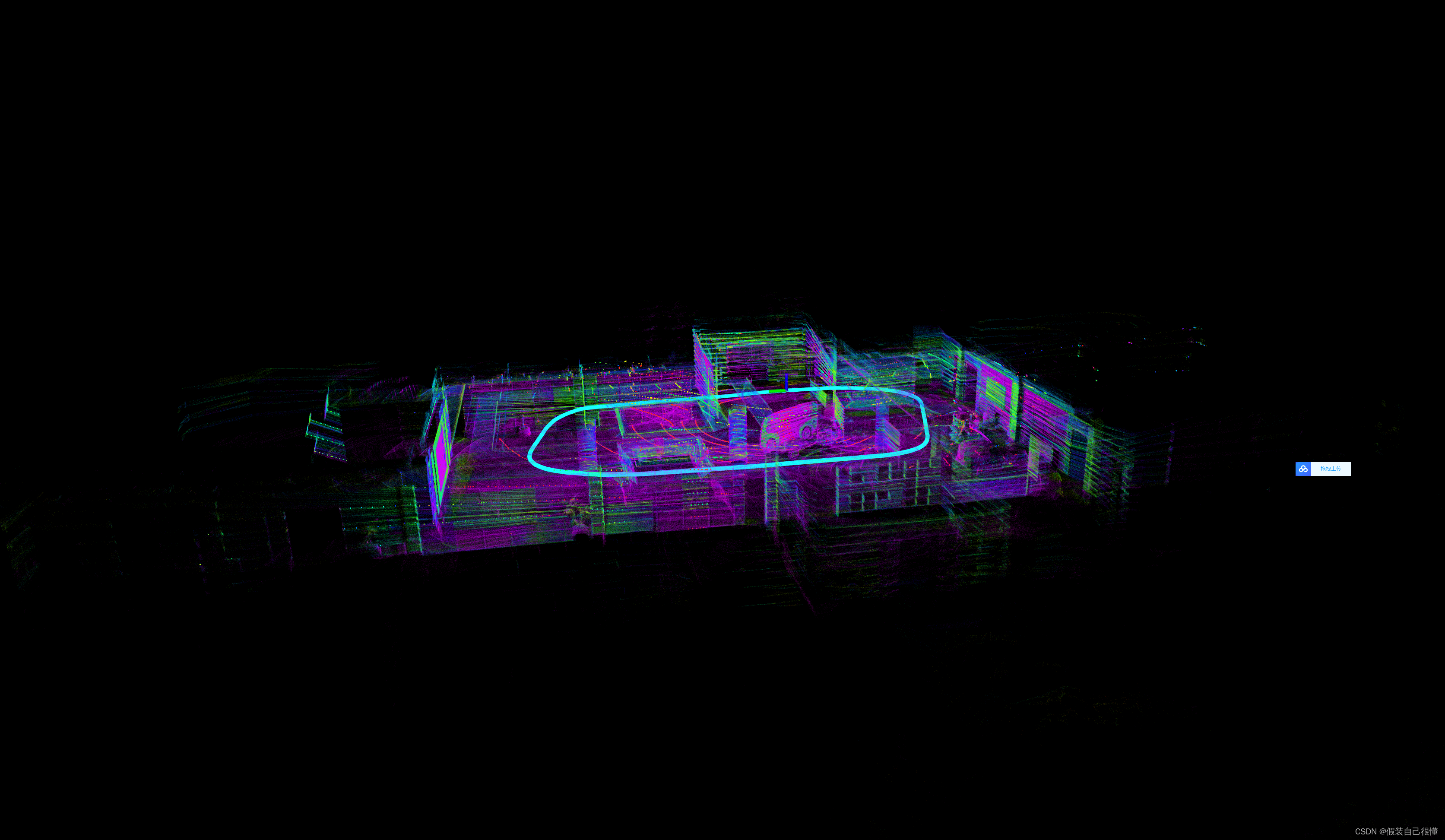
非常简单,两三个小时就搞定了,这比liosam好的多.















 491
491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









