






LoFTR
论文链接:LoFTR: Detector-Free Local Feature Matching with Transformers
官方链接:LoFTR: Detector-Free Local Feature Matching with Transformers
老规矩,先看一下效果
总体流程
我们先简单过一遍流程,然后在代码里详细说。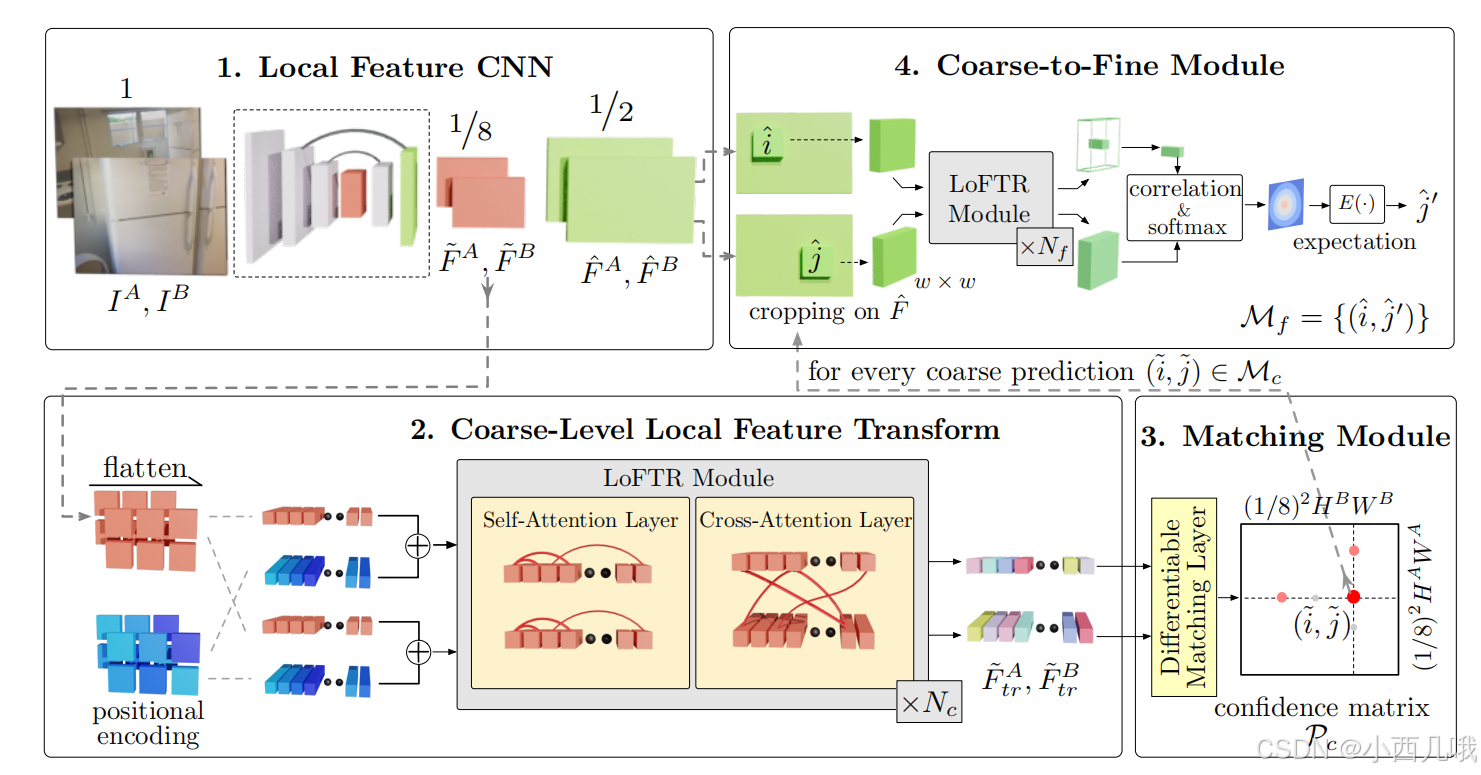
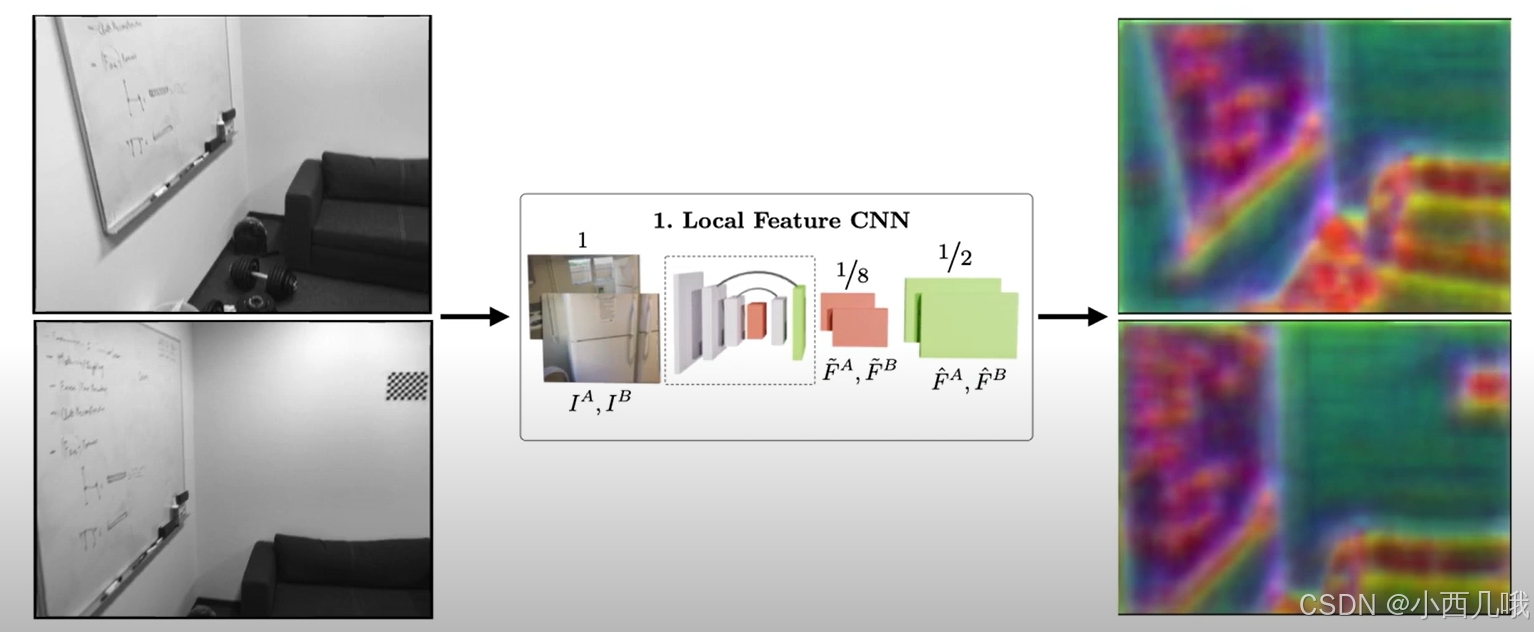
首先第一步啊,还是老规矩,用backbone特征提取。不过这里有一点注意,输入的是两张图片A和B,两张图片会拼接在一起然后进行backbone。最后输出一个原图大小1/8的特征图A和B,一个原图大小1/2的特征图A和B。为了方便后续了理解,这里假设1/8的特征图的(h,w)为(60,80),1/2的特征图的(h,w)为(240,320)。
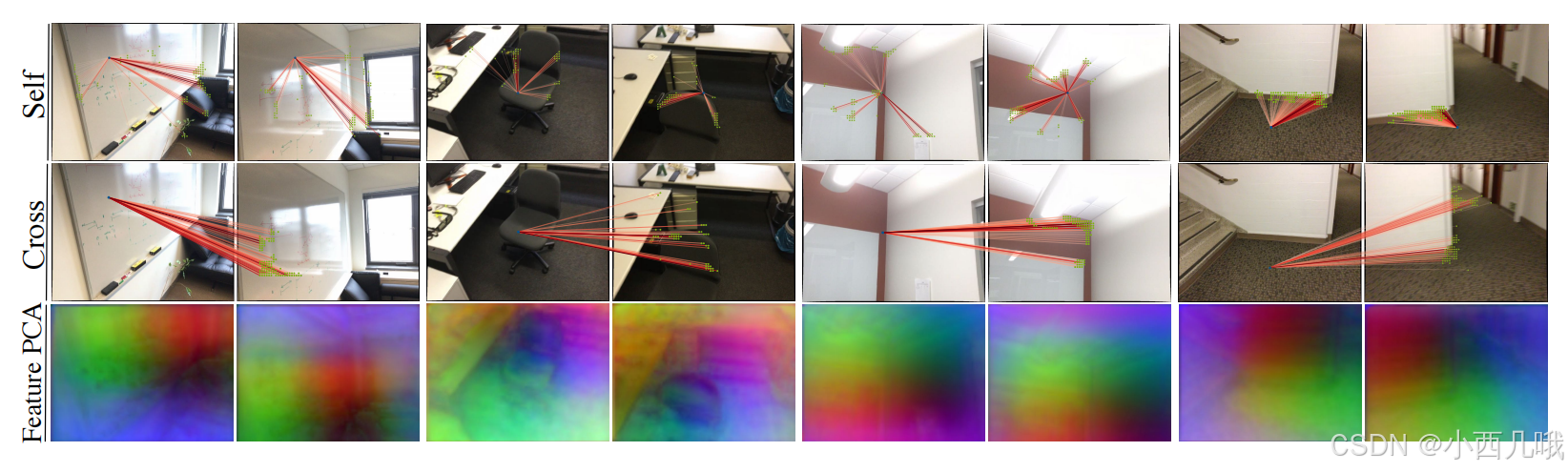
做完backbone提取的特征图如下。
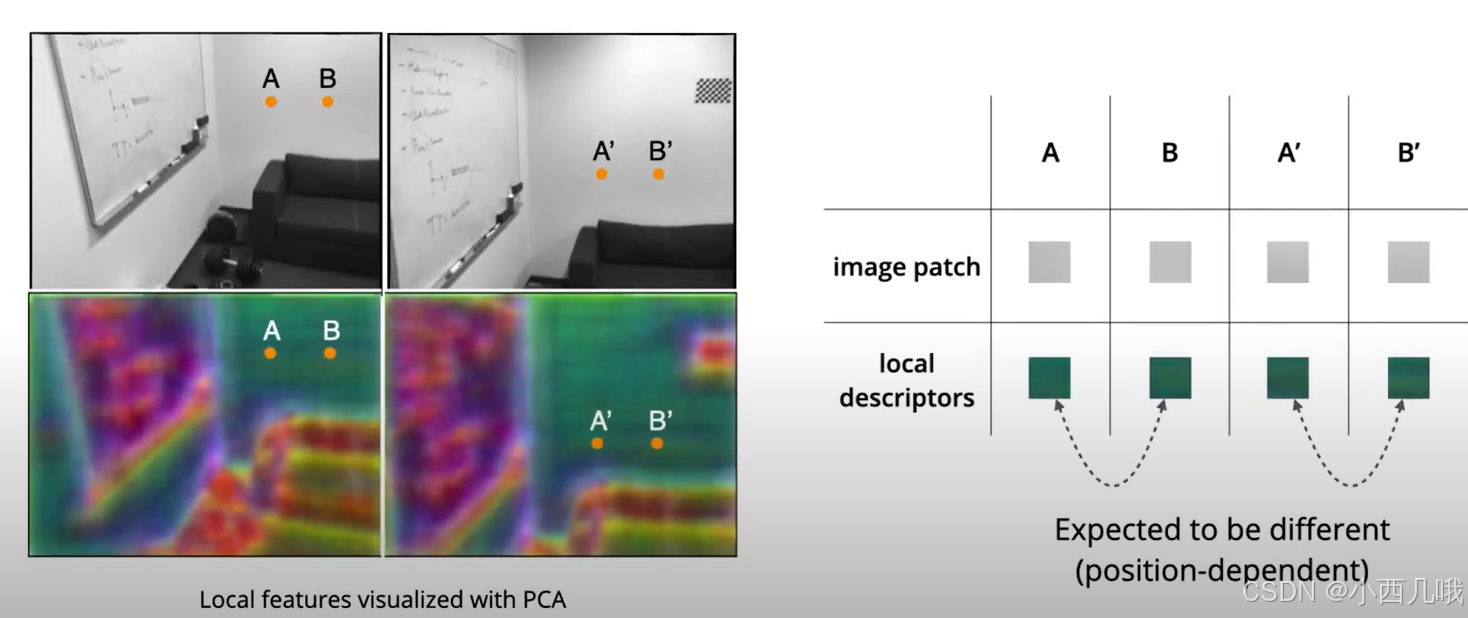
可以看到,A点和B点的特征非常相似,无论是周边环境还是自己本身的形状都很相似,很容易将A点匹配上B点,所以我们还需要进一步的特征提取。
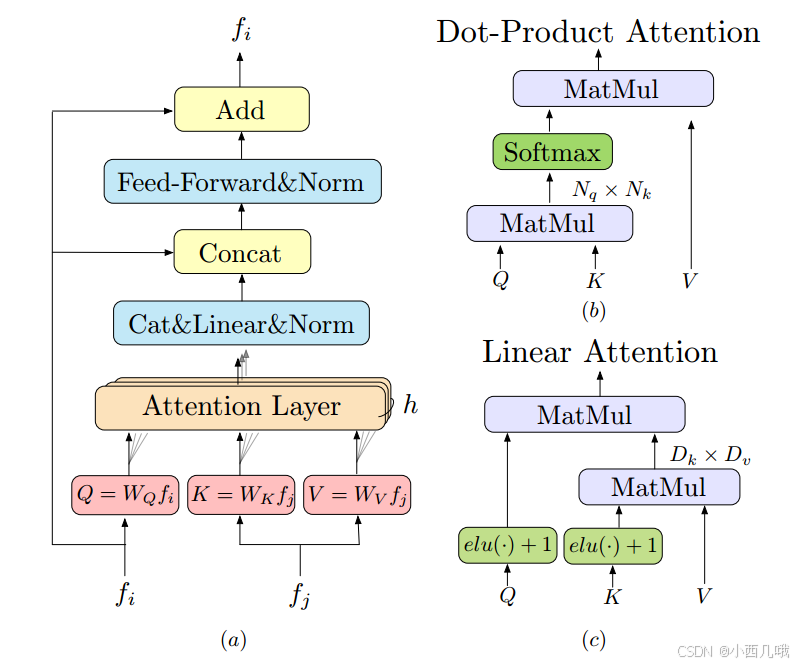
第二模块就是大名鼎鼎的Transformer,这里分了两块,self-Attention和Cross-Attention。
将刚刚提取的1/8的特征图拿过来,现在我们想对特征图A和特征图B做一个特征点匹配,怎么做呢?挨个询问呗,A里的每个点去问B里的每个点,我跟你匹配得上不?这是不是相当于A里的每个点提供query,B里的每个点提供key和value,这里就是做了一个Cross-Attention。但是有个问题啊,要是A里的好几个点都看上了B的同一个点怎么办?所以咱得先内部商量一下,A内部的每个点都先看看别的点是怎么个事,咱们分个工别选重了,这里就是做了一个self-Attention。这里要注意的点呢,不是做完self再去做cross的,而是先做一个self,再做cross,然在再走self->cross,重复几遍的走。最后得到重构后的特征图A和B。因为Transformer会将二维特征图转为一个序列,所以这时输出的特征图A和B为(B, 4800,dim)。B为批量大小,4800=60×80,dim为特征图维度,比如256。
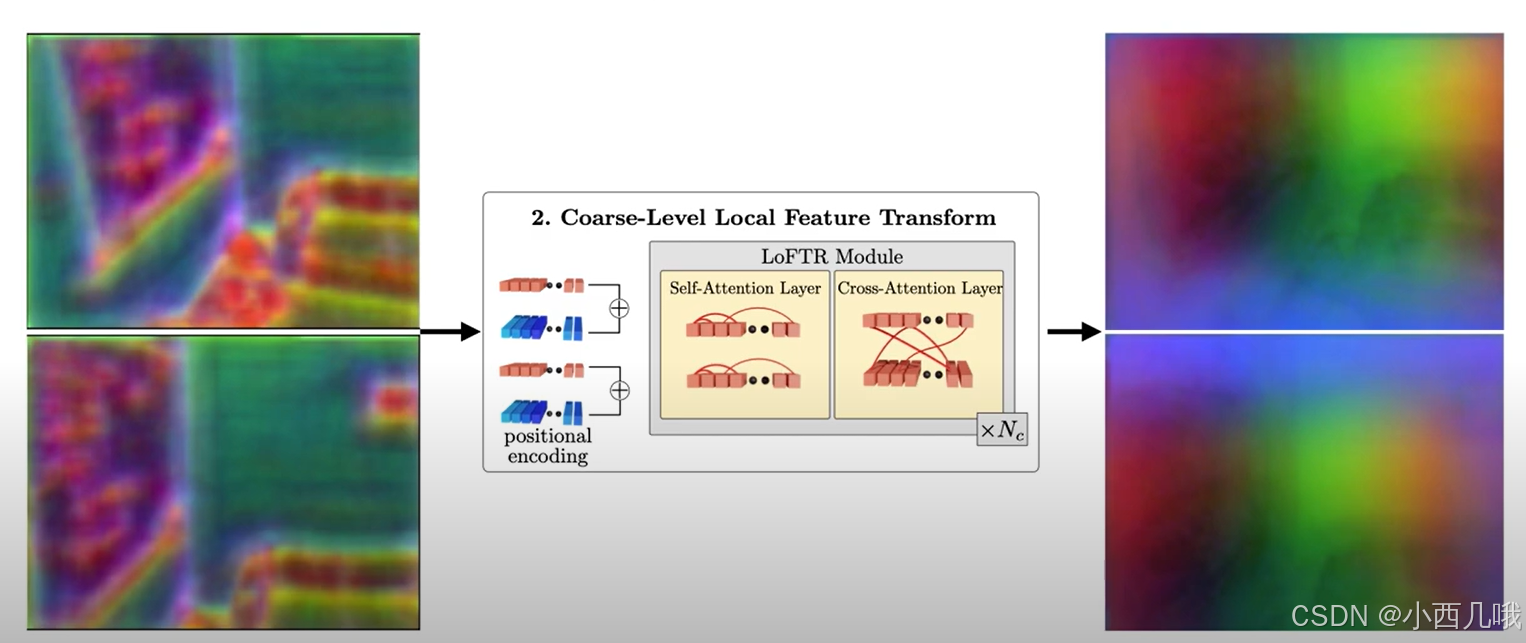
做完Transformer提取的特征图如下。
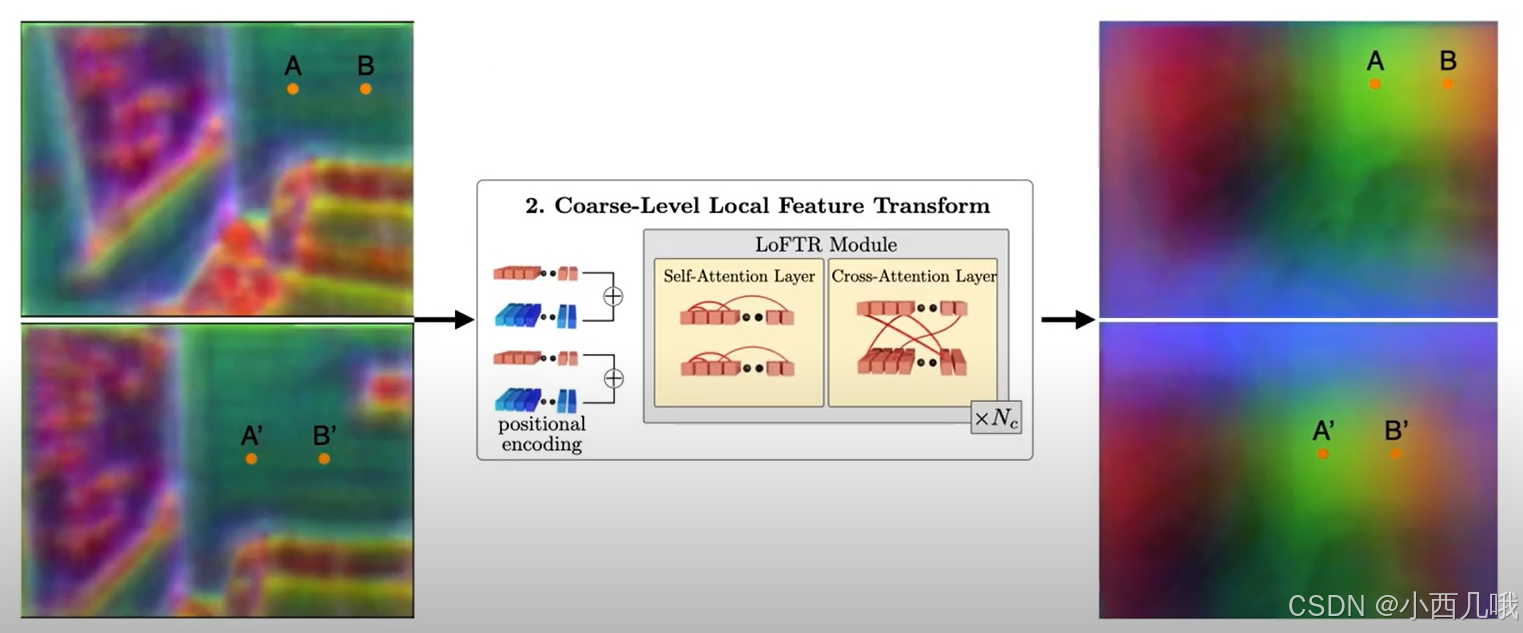
这时候我们再看A点和B点,明显就不可能匹配上了。
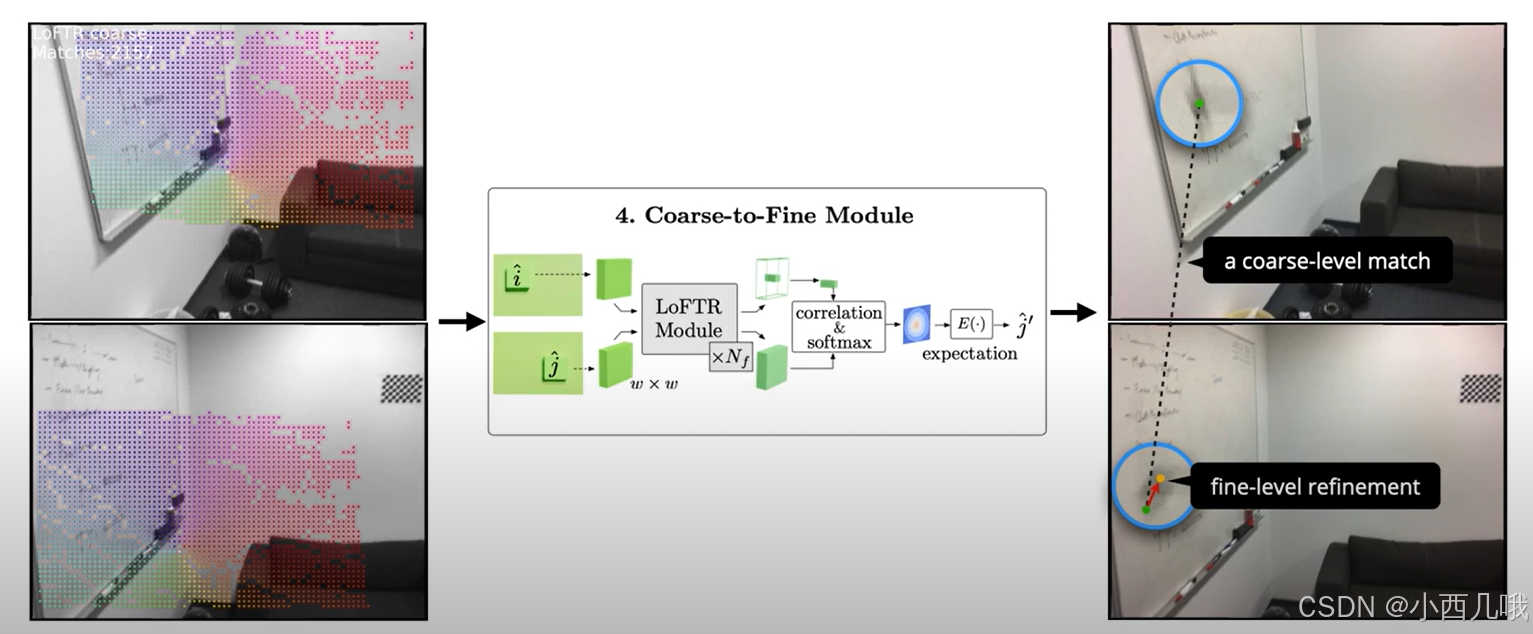
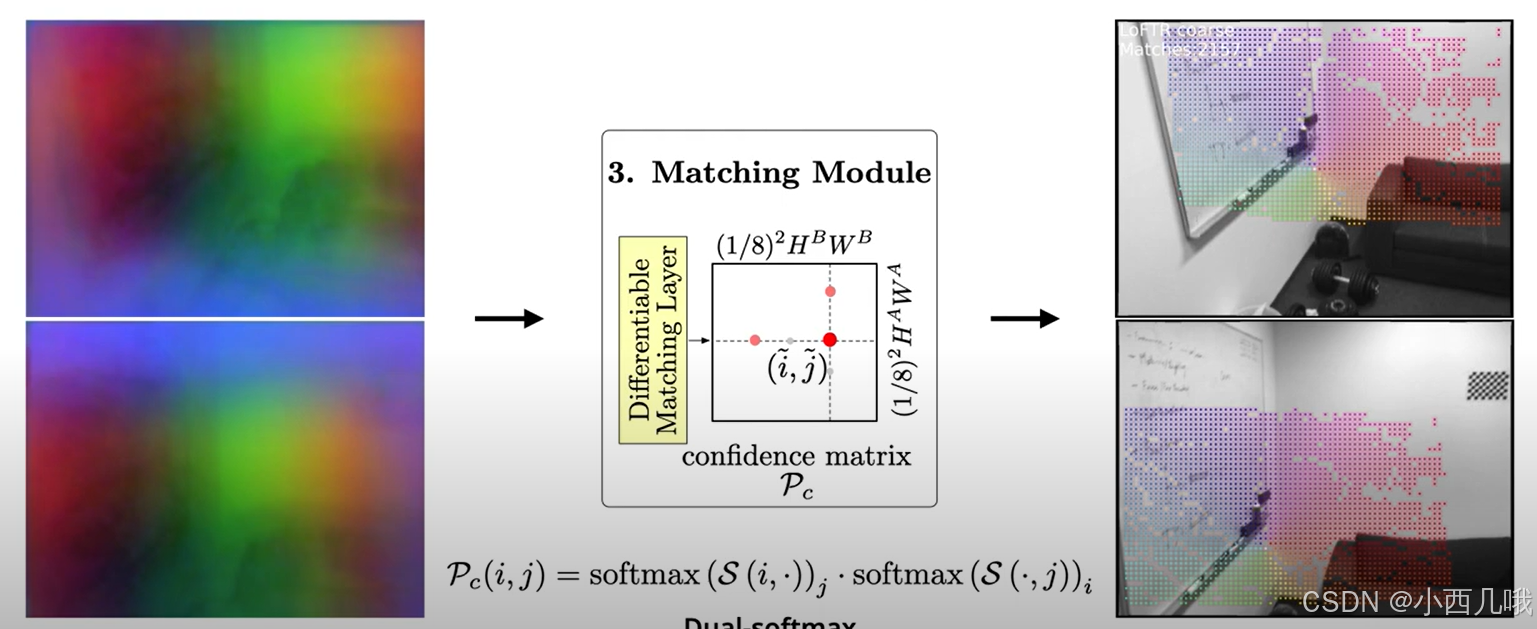
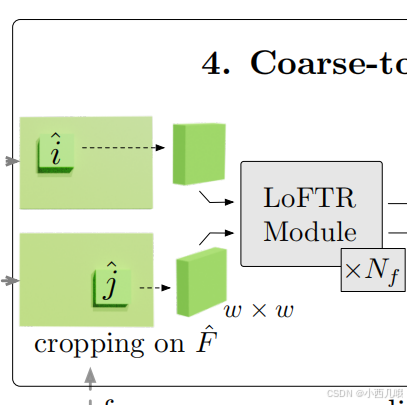
第三步就要开始做匹配了,不过匹配分两步走,先进行粗粒度匹配,然后再细粒度匹配。
粗粒度匹配会先计算特征图A上的每个点与特征图B上的每个点的一个关系,那就会得到一个[4800,4800]的一个关系矩阵。既然有了关系矩阵,那就可以剔除那些关系不行的匹配点。咱们进行一定的阈值过滤,比如匹配度小于0.2的就扔掉。而且两个点的匹配必须是两两最最好(互近邻),不能是一厢情愿的结果。将这些塑料关系剔除后,将剩余的点进行位置匹配,即找到特征图A上i点对应的特征图B上j点。
咱们为什么说这是一个粗力度匹配呢,你想啊,我们拿来做匹配的特征图都是1/8大小的,这看似是4800个点,其实每个点都包含了原图一块区域的特征,所以我们要再细化一下。
细粒度匹配会将开始backbone提取的1/2的特征图拿过来和粗粒度匹配的结果进行对应。不过这1/2的特征图不是拿点来跟你进行匹配了,而是拿区域跟你进行匹配。通过滑动窗口,可以将图像细分为许多小区域,每个区域由窗口内的特征向量表示。这过程有点像卷积,但跟卷积不同的是它不做任何计算。比如kernel_size=(5,5),它将这个5×5的区域拿出来展平作为一条数据,然后滑到下一个窗口,拿出这个窗口的数据展平作为一条数据,然后滑到下一个窗口…它也不是一步一步的滑下去,也会进行stride和padding的操作,最后拿到4800条数据,维度为(4800,25,dim)。
巧了这不,你经过粗粒度匹配有4800条数据,我也有,那咱们对应对应呗。假设我们经过粗粒度后有100个区域匹配上了,那么现在咱们手里还剩(100,25,dim)。但是匹配的结果不一定是区域a的中心点与区域b的中心点进行了匹配,可能匹配的是区域a的左上角与区域b的右下角,就是可能会有一些偏移。接下来我们怎么做呢?其实和粗粒度是一样的。粗粒度是4800个点与4800个点做匹配,那细粒度也一以贯之呗,用25个点与25个点进行匹配。但是经过Transform,输入多少dim,输出还是多少dim, 并没有输出一个结果。它只是将特征向量进行了一个重构,但是并不像全连接层输出一个结果啊,所以我们还需要进行一些微调
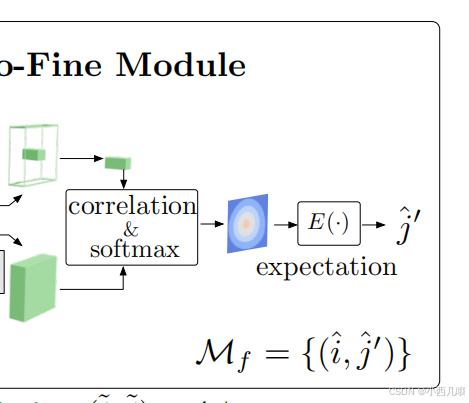
我们计算5×5区域中,每个点与中心点的一个联系,用softmax计算它们的概率关系,得到一个100×5×5的概率图。 最后我们计算每个区域概率的期望,得到(100,2)的实际位置,这样咱们就匹配上了100个位置。最终完成下图的匹配。
代码
这里直接讲demo怎么跑的,咱们运行demo_loftr.py。
s = VideoStreamer(opt.input, opt.resize, opt.skip, opt.image_glob, opt.max_length)
frame, ret = vs.next_frame()
frame_tensor = frame2tensor(frame, device)
last_data = {'image0': frame_tensor}
...
while True:
frame, ret = vs.next_frame()
frame_tensor = frame2tensor(frame, device)
last_data = {**last_data, 'image1': frame_tensor}
matcher(last_data)
这里看一下图片导入模型的一个过程。可以看到在初始阶段我们就把第一张图片拿出来了,其作为image0放入last_data中。在下面的while True过程中,每一次会将下一张图片拿出来,作为image1放入last_data中。
直接在loftr.py的forward里打个断点,我们进去看看怎么个事
1、backbone特征提取
loftr.py的forward里分了五步走,我们一一讲解。
首先第一步,提取特征。
# 1. Local Feature CNN
data.update({ # 先提取两张图片
'bs': data['image0'].size(0),
'hw0_i': data['image0'].shape[2:], 'hw1_i': data['image1'].shape[2:]
})
if data['hw0_i'] == data['hw1_i']: # faster & better BN convergence 将两张图片拼接在一起然后传入backbone做特征提取
feats_c, feats_f = self.backbone(torch.cat([data['image0'], data['image1']], dim=0)) # 输出一个1/8的和一个1/2的特征图
(feat_c0, feat_c1), (feat_f0, feat_f1) = feats_c.split(data['bs']), feats_f.split(data['bs']) # 将两张特征图分开
else: # handle different input shapes
(feat_c0, feat_f0), (feat_c1, feat_f1) = self.backbone(data['image0']), self.backbone(data['image1'])
data.update({
'hw0_c': feat_c0.shape[2:], 'hw1_c': feat_c1.shape[2:],
'hw0_f': feat_f0.shape[2:], 'hw1_f': feat_f1.shape[2:]
})
对应下面的这张图我们来讲解。首先我们拿出这个两张图片,然后将它们拼接在一起放入backbone中。backbone内容我就不说了,就是一些卷积,然后上采样然后再卷积这些操作,得到1/8的特征图feats_c和1/2的特征图feats_f。因为刚刚咱们传进去的时候是拼接在一起的,所以咱再给它分开来,最后得到1/8的特征图(feat_c0, feat_c1)和1/2的特征图(feat_f0, feat_f1)。我们这里假设feat_c0和feat_c1的(b,c,h,w)为(1,256,60,80)。
2、注意力机制
# 2. coarse-level loftr module
# add featmap with positional encoding, then flatten it to sequence [N, HW, C]
feat_c0 = rearrange(self.pos_encoding(feat_c0), 'n c h w -> n (h w) c') # 给特征图加上位置编码
feat_c1 = rearrange(self.pos_encoding(feat_c1), 'n c h w -> n (h w) c')
mask_c0 = mask_c1 = None # mask is useful in training
if 'mask0' in data:
mask_c0, mask_c1 = data['mask0'].flatten(-2), data['mask1'].flatten(-2)
feat_c0, feat_c1 = self.loftr_coarse(feat_c0, feat_c1, mask_c0, mask_c1)
我们把刚刚1/8的特征图拿过来进行Transform。首先加上位置编码,位置编码我就不详说了,是Transform的基础内容了,用正余弦往里加就完事了。rearrange(x,'n c h w -> n (h w) c')会将原本的 h和 w 两个维度合并为一个维度 (h×w),那么我们原来的feat_c0和feat_c1由(1,256,60,80)转为(1,4800,256)。mask是在训练过程有的东西,咱们不看,直接进入self.loftr_coarse()。
def forward(self, feat0, feat1, mask0=None, mask1=None):
assert self.d_model == feat0.size(2), "the feature number of src and transformer must be equal"
for layer, name in zip(self.layers, self.layer_names):
if name == 'self':
feat0 = layer(feat0, feat0, mask0, mask0)
feat1 = layer(feat1, feat1, mask1, mask1)
elif name == 'cross':
feat0 = layer(feat0, feat1, mask0, mask1)
feat1 = layer(feat1, feat0, mask1, mask0)
else:
raise KeyError
return feat0, feat1
这里的self.layer_names值为['self', 'cross', 'self', 'cross', 'self', 'cross', 'self', 'cross'],这不就是我刚刚说的,重复做self->cross,这里重复了四次。self是自己跟自己做Transform,cross是两张图互相的Transform。我们进入layer看看这么个事。
def forward(self, x, source, x_mask=None, source_mask=None):
bs = x.size(0)
query, key, value = x, source, source
# multi-head attention
query = self.q_proj(query).view(bs, -1, self.nhead, self.dim) # [N, L, (H, D)]
key = self.k_proj(key).view(bs, -1, self.nhead, self.dim) # [N, S, (H, D)]
value = self.v_proj(value).view(bs, -1, self.nhead, self.dim)
message = self.attention(query, key, value, q_mask=x_mask, kv_mask=source_mask) # [N, L, (H, D)]
message = self.merge(message.view(bs, -1, self.nhead * self.dim)) # [N, L, C]
message = self.norm1(message)
# feed-forward network
message = self.mlp(torch.cat([x, message], dim=2))
message = self.norm2(message)
return x + message
在做self时,x和source是一样的。这里的q_proj、k_proj 和 v_proj是线性投影层,用于将输入映射到 query、key 和 value 的空间。
self.q_proj = nn.Linear(d_model, d_model, bias=False)
self.k_proj = nn.Linear(d_model, d_model, bias=False)
self.v_proj = nn.Linear(d_model, d_model, bias=False)
然后我们view一下,将原来256个dim分配到每个注意力头上。比如我们有8个注意力头,每个头分配256/8=32个dim,那么query、key 和 value的维度为(1,4800,8,32)。
是时候调用多头注意力模块attention,计算一下query、key 和 value之间的关系了,这里用的不是传统的注意力机制,而是线性注意力机制。传统的注意力机制通过Q和K 内积计算每个查询对键的相关性,并通过归一化(比如 softmax)得到权重,然后将权重应用于 V,生成输出。公式如下图。

而线性注意力机制,我们进去看看怎么个事。
def forward(self, queries, keys, values, q_mask=None, kv_mask=None):
""" Multi-Head linear attention proposed in "Transformers are RNNs"
Args:
queries: [N, L, H, D] n:样本数 l:序列长度 h:头数 d:维度
keys: [N, S, H, D] s:序列长度
values: [N, S, H, D]
q_mask: [N, L]
kv_mask: [N, S]
Returns:
queried_values: (N, L, H, D)
"""
Q = self.feature_map(queries)
K = self.feature_map(keys)
# set padded position to zero
if q_mask is not None:
Q = Q * q_mask[:, :, None, None]
if kv_mask is not None:
K = K * kv_mask[:, :, None, None]
values = values * kv_mask[:, :, None, None]
v_length = values.size(1)
values = values / v_length # prevent fp16 overflow
# K(n, s, h, d)和values(n, s, h, v)按位加权合并 -> (n, h, d, v) 计算每个位置K和values的加权积,按头h和维度d结合,得到 KV
KV = torch.einsum("nshd,nshv->nhdv", K, values) # (S,D)' @ S,V
# K沿序列长度s进行求和 -> (n, h, d) 然后计算Q和K的点积,得到一个加权值(n, l, h) -> 反映了 Q 和 K 之间的相似度
Z = 1 / (torch.einsum("nlhd,nhd->nlh", Q, K.sum(dim=1)) + self.eps)
# 根据Z对KV进行加权,并得到最终的查询结果
queried_values = torch.einsum("nlhd,nhdv,nlh->nlhv", Q, KV, Z) * v_length
return queried_values.contiguous()
主要是最后三行代码。
KV的计算:对于每个头 h,对键 K 和值 V 的每个位置 s 逐元素相乘(点积),然后沿序列长度 S 累加,得到形状为 [H,D,V] 的全局上下文矩阵。比如,K的维度[4800, 32],D的维度[4800, 32],K与D点积之后得到[32,32],不过这里有8个头,所以最后得到的结果是[8,32,32]。
Z的计算:首先对键 K 在序列长度 S 上累加,得到形状为 [H,D] 的向量表示(每个头的全局表示)。然后,计算查询 Q 与键 K 的点积(沿维度 D),结果形状为 [L,H]。最后,取倒数并加上一个小值 ϵ 防止数值溢出。比如,K的维度[4800, 32],在序列长度 S 上累加得到[1,32],Q的维度[4800, 32],Q 与 K 点积得到[4800,1],不过这里有8个头,所以最后得到的结果是[4800,8]。
查询结果的计算:Q 与全局上下文 KV 按维度 D 相乘,结果形状为 [L,H,V]。使用归一化因子 Z 对结果加权,得到归一化后的查询值。比如,Q的维度[4800, 32],KV的维度是[32,32],Q和KV的点积为[4800,32],再乘上权重Z得到[4800,32],不过这里有8个头,所以最后得到的结果是[4800,8,32]。
根据我的了解,传统注意力机制的复杂度是 O(L^2)(因为要计算每个 Q 和 K 的点积),而线性注意力机制的方法通过提前计算 KV,把复杂度降到了 O(L)。详细可以看这篇论文Transformers are RNNs: Fast Autoregressive Transformers with Linear Attention。
注意力机制给我的感觉就是两矩阵做内积,就可以算出这两矩阵的关系了,但是你要问我为什么做内积能得到它两的关系,我也说不上来(学艺不精,就来献丑)。我只能大致给个感觉,比如两向量如果垂直,那相乘就是0,表示这两向量没啥关系。如果这两向量的夹角非常小,那相乘就越大,表示这两向量脱不了干系。如果直接重合了(夹角为0),那咱俩简直就是一个东西啊。
最终我们完成了第二部分的任务,如下图。
3、粗粒度匹配
# 3. match coarse-level
self.coarse_matching(feat_c0, feat_c1, data, mask_c0=mask_c0, mask_c1=mask_c1)
我们进去看看怎么个事。
def forward(self, feat_c0, feat_c1, data, mask_c0=None, mask_c1=None):
N, L, S, C = feat_c0.size(0), feat_c0.size(1), feat_c1.size(1), feat_c0.size(2)
# normalize
feat_c0, feat_c1 = map(lambda feat: feat / feat.shape[-1] ** .5,
[feat_c0, feat_c1])
if self.match_type == 'dual_softmax':
sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0, # 计算特征图1与特征图2上每个点的关系
feat_c1) / self.temperature
if mask_c0 is not None:
sim_matrix.masked_fill_(
~(mask_c0[..., None] * mask_c1[:, None]).bool(),
-INF)
conf_matrix = F.softmax(sim_matrix, 1) * F.softmax(sim_matrix, 2) # 转为概率
elif self.match_type == 'sinkhorn':
# sinkhorn, dustbin included
sim_matrix = torch.einsum("nlc,nsc->nls", feat_c0, feat_c1)
if mask_c0 is not None:
sim_matrix[:, :L, :S].masked_fill_(
~(mask_c0[..., None] * mask_c1[:, None]).bool(),
-INF)
# build uniform prior & use sinkhorn
log_assign_matrix = self.log_optimal_transport(
sim_matrix, self.bin_score, self.skh_iters)
assign_matrix = log_assign_matrix.exp()
conf_matrix = assign_matrix[:, :-1, :-1]
# filter prediction with dustbin score (only in evaluation mode)
if not self.training and self.skh_prefilter:
filter0 = (assign_matrix.max(dim=2)[1] == S)[:, :-1] # [N, L]
filter1 = (assign_matrix.max(dim=1)[1] == L)[:, :-1] # [N, S]
conf_matrix[filter0[..., None].repeat(1, 1, S)] = 0
conf_matrix[filter1[:, None].repeat(1, L, 1)] = 0
if self.config['sparse_spvs']:
data.update({'conf_matrix_with_bin': assign_matrix.clone()})
data.update({'conf_matrix': conf_matrix})
# predict coarse matches from conf_matrix
data.update(**self.get_coarse_match(conf_matrix, data))
sim_matrix就是特征图A上每个点与特征图B上每个点的乘积,所以得到[4800,4800]的矩阵,即特征图A与特征图B上每个点与每个点之间的关系。公式如下。

然后经过两个softmax,第一层 Softmax 是对行进行归一化,得到每个查询(Q)相对于所有键(K)的分布。第二层 Softmax 是对列进行归一化,得到每个键(K)相对于所有值(V)的分布。最后按元素相乘,是想得到一个同时考虑行和列信息的加权相似度矩阵conf_matrix,即软相互最近邻匹配的概率。公示如下。

得到了两个特征图之间的匹配概率,我们要开始粗粒度的挑选了。跳入到self.get_coarse_match()看看。
# 1. confidence thresholding
mask = conf_matrix > self.thr # 大于0.2的才会被保存下来
mask = rearrange(mask, 'b (h0c w0c) (h1c w1c) -> b h0c w0c h1c w1c',
**axes_lengths)
if 'mask0' not in data: # 对边界数据做个处理
mask_border(mask, self.border_rm, False)
else:
mask_border_with_padding(mask, self.border_rm, False,
data['mask0'], data['mask1'])
mask = rearrange(mask, 'b h0c w0c h1c w1c -> b (h0c w0c) (h1c w1c)',
**axes_lengths)
首先设置个门槛,匹配概率小于self.thr的塑料关系被踢掉。下面是对边界数据做个处理,不管。
# 2. mutual nearest 咱们两得都最最好才能被留下
mask = mask \
* (conf_matrix == conf_matrix.max(dim=2, keepdim=True)[0]) \
* (conf_matrix == conf_matrix.max(dim=1, keepdim=True)[0])
保留每一行的最大值,保留每一列的最大值,通过这两个条件结合,最终的mask只会保留那些同时是所在行和所在列的最大值的位置,即特征图AB看看你跟我最好的是不是我跟你最好的,只有咱们两得都最最好才能被留下。
# 3. find all valid coarse matches
# this only works when at most one `True` in each row
mask_v, all_j_ids = mask.max(dim=2) # 找到相互匹配的位置
b_ids, i_ids = torch.where(mask_v) # B图j的位置与A图i的位置匹配
j_ids = all_j_ids[b_ids, i_ids]
mconf = conf_matrix[b_ids, i_ids, j_ids] # 它们匹配的概率值
寻找剩下有效的的粗匹配,找到特征图A与特征图B匹配的索引位置。
最终我们完成了第三部分的任务,如下图。
4、细粒度匹配
# 4. fine-level refinement
feat_f0_unfold, feat_f1_unfold = self.fine_preprocess(feat_f0, feat_f1, feat_c0, feat_c1, data)
if feat_f0_unfold.size(0) != 0: # at least one coarse level predicted
feat_f0_unfold, feat_f1_unfold = self.loftr_fine(feat_f0_unfold, feat_f1_unfold)
首先对特征图进行一个预处理操作,self.fine_preprocess()传入的是一开始backbone提取的1/2的特征图和,跳进去看看怎么个事。
def forward(self, feat_f0, feat_f1, feat_c0, feat_c1, data):
W = self.W
stride = data['hw0_f'][0] // data['hw0_c'][0]
data.update({'W': W})
if data['b_ids'].shape[0] == 0:
feat0 = torch.empty(0, self.W ** 2, self.d_model_f, device=feat_f0.device)
feat1 = torch.empty(0, self.W ** 2, self.d_model_f, device=feat_f0.device)
return feat0, feat1
# 1. unfold(crop) all local windows
feat_f0_unfold = F.unfold(feat_f0, kernel_size=(W, W), stride=stride, padding=W // 2) # 3200 = 5*5*128
feat_f0_unfold = rearrange(feat_f0_unfold, 'n (c ww) l -> n l ww c', ww=W ** 2)
feat_f1_unfold = F.unfold(feat_f1, kernel_size=(W, W), stride=stride, padding=W // 2)
feat_f1_unfold = rearrange(feat_f1_unfold, 'n (c ww) l -> n l ww c', ww=W ** 2)
# 2. select only the predicted matches
feat_f0_unfold = feat_f0_unfold[data['b_ids'], data['i_ids']] # [n, ww, cf]
feat_f1_unfold = feat_f1_unfold[data['b_ids'], data['j_ids']]
# option: use coarse-level loftr feature as context: concat and linear
if self.cat_c_feat:
feat_c_win = self.down_proj(torch.cat([feat_c0[data['b_ids'], data['i_ids']],
feat_c1[data['b_ids'], data['j_ids']]], 0)) # [2n, c]
feat_cf_win = self.merge_feat(torch.cat([
torch.cat([feat_f0_unfold, feat_f1_unfold], 0), # [2n, ww, cf]
repeat(feat_c_win, 'n c -> n ww c', ww=W ** 2), # [2n, ww, cf]
], -1))
feat_f0_unfold, feat_f1_unfold = torch.chunk(feat_cf_win, 2, dim=0)
return feat_f0_unfold, feat_f1_unfold
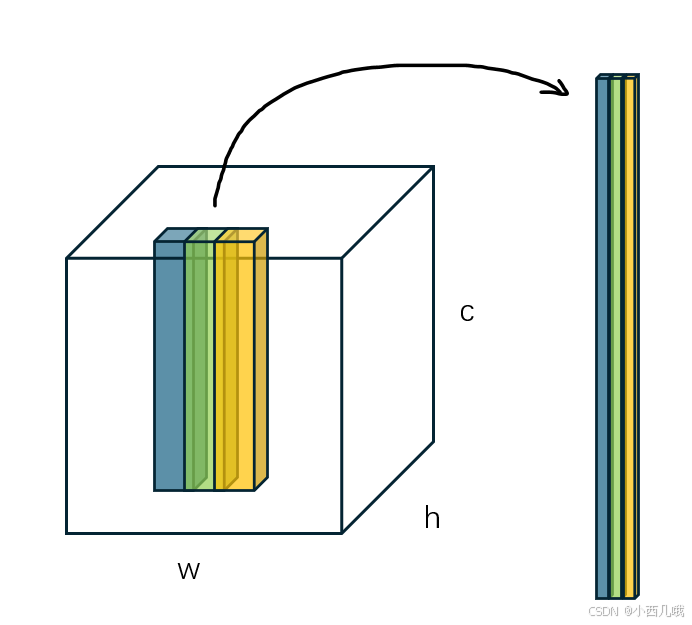
F.unfold()就是我开头说的对1/2的特征图做区域匹配,而不是点匹配。比如我们输入的feat_f0维度是(1,128,240,320),经过F.unfold(),假设kernel_size=(5, 5),stride=4,padding=2,那么输出feat_f0_unfold维度是(1,3200,4800)。这个3200不重要,反正后面还要进行rearrange给它展回去,展成(4800,25,128)。这边就直观多了5×5×128=3200,4800跟卷积那个计算是一样的,这个很基础应该不用我多说了吧。
F.unfold()有点像卷积,但又不是卷积,毕竟形式上感觉是一样的,都有kernel_size、stride和padding这些东西。不过F.unfold()是不做计算的,只负责提取滑动窗口的内容然后展开,而卷积会对每个窗口内的值和卷积核进行点积计算,输出新的值。为了帮助大家理解,我画了一张图如下。
处理完1/2的特征图后,巧了,我也有4800条数据你也有4800条数据,我们可以做个匹配啦。之前粗粒度最后得到了匹配的特征图A的索引位置i与特征图B的索引位置j,所以将有效的索引传入,最终得到有效匹配区域feat_f0_unfold和feat_f1_unfold。
最后对feat_f0_unfold和feat_f1_unfold做注意力机制,self.loftr_fine(feat_f0_unfold, feat_f1_unfold),和之前的一样的我就不多说了。
最终我们完成了第四部分的任务,如下图。
5、通过期望计算得到最终输出
终于到第五步了,写累死我了k。
def forward(self, feat_f0, feat_f1, data):
M, WW, C = feat_f0.shape
W = int(math.sqrt(WW))
scale = data['hw0_i'][0] / data['hw0_f'][0]
self.M, self.W, self.WW, self.C, self.scale = M, W, WW, C, scale
# corner case: if no coarse matches found
if M == 0:
assert self.training == False, "M is always >0, when training, see coarse_matching.py"
# logger.warning('No matches found in coarse-level.')
data.update({
'expec_f': torch.empty(0, 3, device=feat_f0.device),
'mkpts0_f': data['mkpts0_c'],
'mkpts1_f': data['mkpts1_c'],
})
return
feat_f0_picked = feat_f0[:, WW // 2, :]
sim_matrix = torch.einsum('mc,mrc->mr', feat_f0_picked, feat_f1)
softmax_temp = 1. / C ** .5
heatmap = torch.softmax(softmax_temp * sim_matrix, dim=1).view(-1, W, W)
# compute coordinates from heatmap
coords_normalized = dsnt.spatial_expectation2d(heatmap[None], True)[0] # [M, 2]
grid_normalized = create_meshgrid(W, W, True, heatmap.device).reshape(1, -1, 2) # [1, WW, 2]
# compute std over <x, y>
var = torch.sum(grid_normalized ** 2 * heatmap.view(-1, WW, 1), dim=1) - coords_normalized ** 2 # [M, 2]
std = torch.sum(torch.sqrt(torch.clamp(var, min=1e-10)), -1) # [M] clamp needed for numerical stability
# for fine-level supervision
data.update({'expec_f': torch.cat([coords_normalized, std.unsqueeze(1)], -1)})
# compute absolute kpt coords
self.get_fine_match(coords_normalized, data)
就像我开头说的那样,匹配上了区域,但具体是区域的哪个点呢?我们再细化一下。
首先找到区域的中心点feat_f0_picked,然后我们计算中心点与区域其它点的一个关系。关系怎么算来着,就是矩阵内积,算出sim_matrix。比如feat_f0_picked的维度是(100,128),feat_f1的维度是(100,25,128),其中100是匹配上的区域,25是5×5的区域,128是dim,做完内积得到sim_matrix(100,25)。给它softmax一下,计算它的概率heatmap(100,5,5)。得到了这个区域的热力图,我怎么知道具体往哪偏呢?计算它的期望,得到它的实际位置coords_normalized(100,2),2就是它xy的实际坐标了。后面就是将coords_normalized还原到原始的位置当中,根据特征图大小的一个比例还原回去。
最终我们完成了第五部分的任务,如下图。

















 5026
5026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









