






Lane Detection车道线检测模型
代码链接:Lane_Detection-study(关键部分注释详细)
论文链接:Ultra Fast Structure-aware Deep Lane Detection
官方链接:Lane-Detection
| 数据集 | 链接 |
|---|---|
| CULane | GoogleDrive/BaiduDrive(code:w9tw) |
| Tusimple | GoogleDrive/BaiduDrive(code:bghd) |
看看效果
总体流程
这个模型的话,网络方面特别简单,毕竟论文题目有个Fast,那网络肯定得简单,越简单越快嘛。不过数据处理那块有点复杂,然后再自定义点适合这个任务的损失函数。我们先简单过一遍流程,然后在代码里详细说。
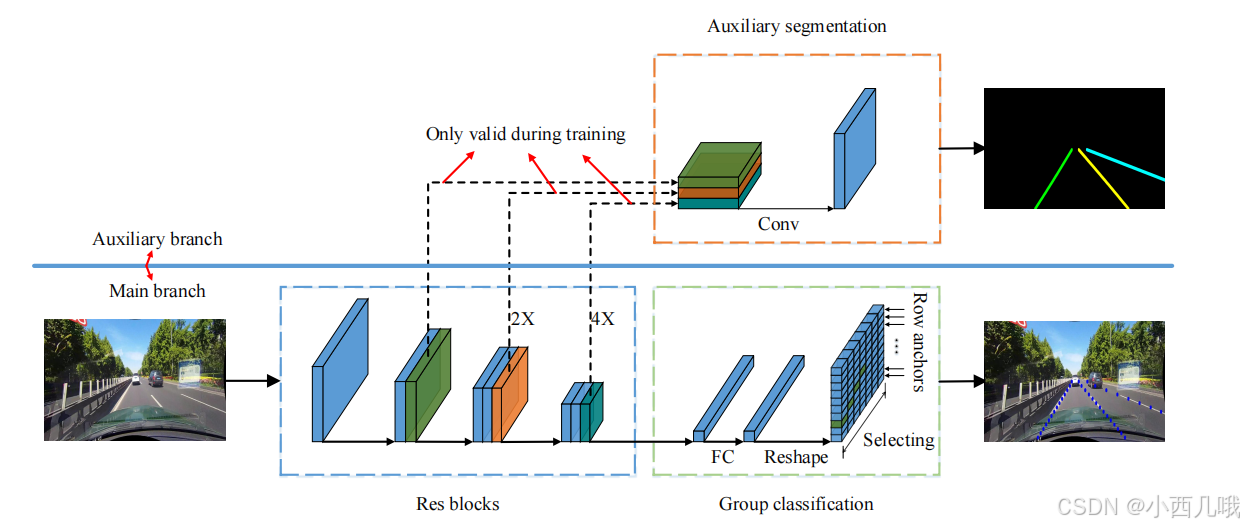
还是老规矩,先输入一个图像然后放到backbone里提取特征(现在模型基本都是这个起步,雷打不动),这里又是我们的老朋友ResNet。接两条支路,上面的是辅助分割,下面的是分类。有没有觉得很奇怪,车道检测怎么都感觉应该用回归做,直接预测车道的位置坐标,但是作者用的是分类而且给出了解释。

上图可以看出,回归的准确率七十左右,而分类的准确率有九十几,这差距有点大的。你要问为什么,实验得真理。
上面那条支路我为什么说辅助分割而不是分割呢?还是那个词Fast!这个分割任务只在训练阶段做,而测试阶段会被移除。辅助分割在训练阶段给分类提供了更多监督信息,让模型更精确地识别车道线。训练结束,分类器已经是个训练有素的牛马了,因此在测试阶段可以一脚给辅助分割蹬掉(教会徒弟,饿死师傅),少了师傅这个慢工出细活的拖油瓶,推理过程直接提速。
论文题目中的Fast不仅展现在网络上,对数据的处理上也有点手段的。我们先来看看标签图是怎么个事。

上图就是原图和它的标签图。标签图看上去一片漆黑,我当时打开标签图文件夹的时候,里面所有的图片都是黑的,一脸懵逼,我以为下载出错了呢。里面还是有值的,只是看不见,到时候会读取它,一会代码里详说。
这个乌黑的图片里是有车道的标识的,视情况而定有几条,最多是4条车道线。我们先要对这个车道线做个预处理。
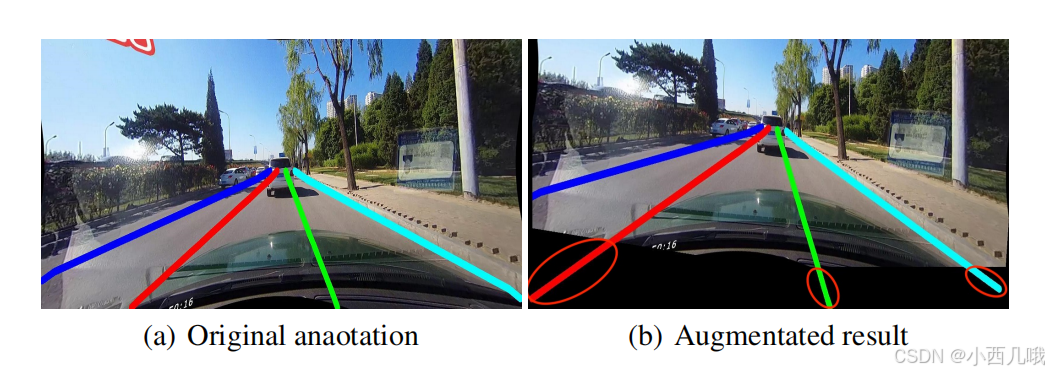
从上图可以看见哈,作者对车道线做了一个增强,将车道线扩展到了图片的边界处,而不是局限于中间那部分。
上面说的,检测车道用的是分类的方法,那对每个像素点问它:“你是车道线不?概率多大啊?”,这计算量,不言而喻了。作者灵机一动,这车道线的位置其实还蛮固定的(因为摄像头的位置是固定的),有些地方明显就不可能有车道线,我给它整个先验信息吧。
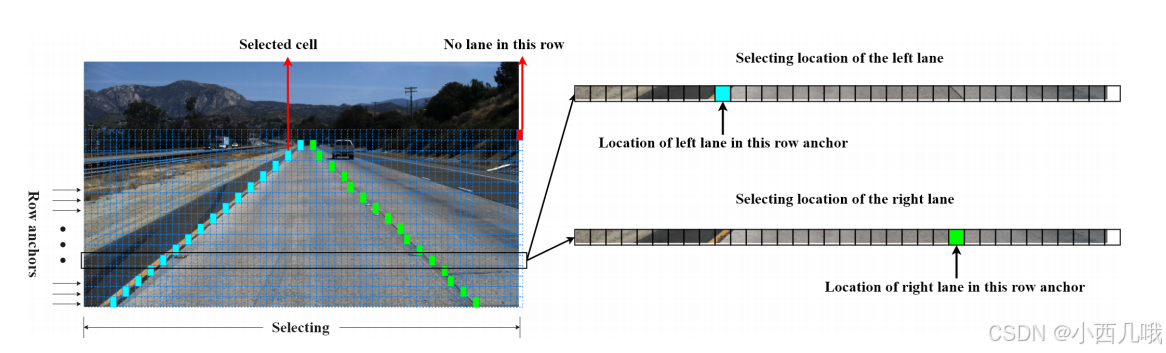
预测一条线,太费事了,给改为预测18个点。这18个点的纵坐标吧,不是很固定,要视情况而定,比如一个拐弯就飘没了。但是它的横坐标,基本不会变化,所以我们先给它定死18个横坐标。好,横坐标确定了我们再来分析它的纵坐标。这18个点吧,它也不是定死的一个像素点位置,那个像素点的一定范围内其实都是车道线。所以我们放宽松,将当前的宽给划分为200个格子。这时候问题就从判断每个像素点是不是车道线,转变为这18行里的200个格子是车道线的概率。(这里的18、200不是固定的,你可以自己调整)
代码
数据处理
先进入dataset.py的LaneClsDataset中。
def __getitem__(self, index):
l = self.list[index] # 数据路径和标签路径
l_info = l.split()
img_name, label_name = l_info[0], l_info[1]
if img_name[0] == '/':
img_name = img_name[1:]
label_name = label_name[1:]
label_path = os.path.join(self.path, label_name)
label = loader_func(label_path)
img_path = os.path.join(self.path, img_name)
img = loader_func(img_path)
if self.simu_transform is not None:
img, label = self.simu_transform(img, label) # 数据增强
lane_pts = self._get_index(label)
# get the coordinates of lanes at row anchors
w, h = img.size
cls_label = self._grid_pts(lane_pts, self.griding_num, w) # 相当于将lane_pts映射到griding_num个格子里
# make the coordinates to classification label
if self.use_aux:
assert self.segment_transform is not None
seg_label = self.segment_transform(label)
if self.img_transform is not None:
img = self.img_transform(img)
if self.use_aux:
return img, cls_label, seg_label
if self.load_name:
return img, cls_label, img_name
return img, cls_labelme
return img, cls_label
前面没什么好说的,就是读取路径,然后做一个简单是数据增强,比如旋转、垂直或水平移动什么的。主要是self._get_index(label)和self._grid_pts(lane_pts, self.griding_num, w), 我们来看看怎么个事。
_get_index
我们先来看一下self._get_index(label)干了啥。
def _get_index(self, label):
w, h = label.size
if h != 288: # 因为后续会给数据resize为288 先验值是按288做的
scale_f = lambda x: int((x * 1.0 / 288) * h)
sample_tmp = list(map(scale_f, self.row_anchor)) # 相当于一个先验值 18个车道点
all_idx = np.zeros((self.num_lanes, len(sample_tmp), 2)) # (4, 18, 2) 4条车道线 18个车道点 2个行列位置 列为-1表示不存在
for i, r in enumerate(sample_tmp): # 遍历每个点 18
label_r = np.asarray(label)[int(round(r))] # 读取标签在这一行的所有信息
for lane_idx in range(1, self.num_lanes + 1): # 遍历每条车道线 4
pos = np.where(label_r == lane_idx)[0]
if len(pos) == 0:
all_idx[lane_idx - 1, i, 0] = r # 第几行
all_idx[lane_idx - 1, i, 1] = -1 # -1为没有信息
continue
pos = np.mean(pos) # 车道线是有宽度的 所以取个平均
all_idx[lane_idx - 1, i, 0] = r # 第几行
all_idx[lane_idx - 1, i, 1] = pos # 当前车道线列位置
# data augmentation: extend the lane to the boundary of image
all_idx_cp = all_idx.copy()
for i in range(self.num_lanes):
if np.all(all_idx_cp[i, :, 1] == -1): # 判断车道存不存在
continue
# if there is no lane
# 对4条车道进行一个延伸,如果不存在这条车道就不
valid = all_idx_cp[i, :, 1] != -1 # 第i个车道线的18个车道点是否存在
# get all valid lane points' index
valid_idx = all_idx_cp[i, valid, :] # 存在的点坐标
# get all valid lane points
if valid_idx[-1, 0] == all_idx_cp[0, -1, 0]:
# 如果最后一个有效车道点的y坐标已经是所有行的最后一个y坐标
# 这意味着这条线已经达到了图像的底部边界
# 所以我们跳过
continue
if len(valid_idx) < 6:
continue
# 如果车道太短,无法延伸
valid_idx_half = valid_idx[len(valid_idx) // 2:, :] # 取后半段的车道点
p = np.polyfit(valid_idx_half[:, 0], valid_idx_half[:, 1], deg=1) # 线性拟合 延长这条线到边界
start_line = valid_idx_half[-1, 0] # 取后半段车道点中最后一个点的 x 坐标作为起点,用于后续查找和拟合
pos = find_start_pos(all_idx_cp[i, :, 0], start_line) + 1 # 找到 start_line 的索引位置
fitted = np.polyval(p, all_idx_cp[i, pos:, 0]) # 得到拟合值
fitted = np.array([-1 if y < 0 or y > w - 1 else y for y in fitted]) # 判断拟合值能否放进图中 -1表示无效
assert np.all(all_idx_cp[i, pos:, 1] == -1)
all_idx_cp[i, pos:, 1] = fitted # 放进下一个位置
if -1 in all_idx[:, :, 0]:
pdb.set_trace()
return all_idx_cp
因为后面会将原图给Resize成288×800,所以标签也是按这个格式做的。self.row_anchor就是一个定死的先验值,在constant.py里,如果用的是culane的数据集那就是18个点的横坐标。为了方便理解,我后面都假设车道线的行坐标有18条。
tusimple_row_anchor = [ 64, 68, 72, 76, 80, 84, 88, 92, 96, 100, 104, 108, 112,
116, 120, 124, 128, 132, 136, 140, 144, 148, 152, 156, 160, 164,
168, 172, 176, 180, 184, 188, 192, 196, 200, 204, 208, 212, 216,
220, 224, 228, 232, 236, 240, 244, 248, 252, 256, 260, 264, 268,
272, 276, 280, 284]
culane_row_anchor = [121, 131, 141, 150, 160, 170, 180, 189, 199, 209, 219, 228, 238, 248, 258, 267, 277, 287]
比如你原图高度是590,会将这先验值映射到到0-590里(因为原先的先验值是按0-288定的),得到实际的位置sample_tmp。
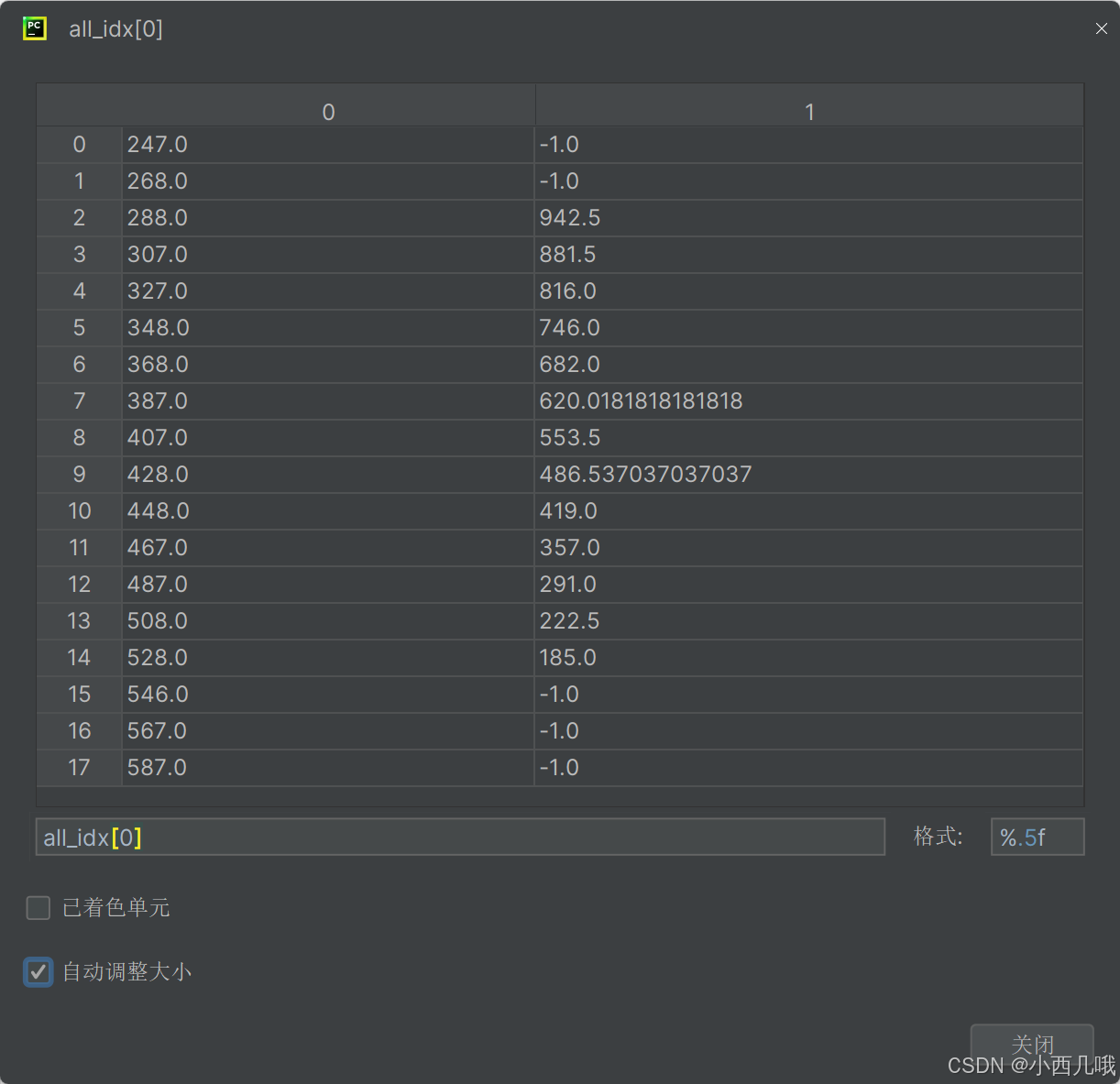
然后我们遍历标签图里的这18行,标签图里最多会有5种值(0-无车道,1-第一条车道,2-第二条车道,3-第三条车道,4-第四条车道)。寻找这18行里有没有车道线,如果没有的话赋值-1,如果有的话记录它的列坐标。因为车道是有一定宽度的,所以会取平均值作为列坐标。最终得到all_idx,维度为(4, 18, 2),分别表示4条车道线,18个车道点,2个行列位置。
比如下图就表示图中第一条车道的信息。第一列表示18个车道点的行坐标,第二列表示纵坐标,-1表示这一行没找到车道线。
然后我们根据all_idx对车道线进行延伸,延伸至图边界。当然要做一些判断,比如有没有这条车道,或者这车道点少于6个也太短了不延伸。如果最后一个有效车道点的y坐标已经是所有行的最后一个y坐标,这意味着这条线已经达到了图像的底部边界,直接跳过。
对于剩下需要做延伸的车道,我们对车道点进行线性拟合(因为有些车道是弯的,不能直接画过去),拟合后得到的值再判断一下能不能放到图中,如果不合规就扔掉(赋值-1)。
最终得到all_idx_cp,包含了延伸后的车道点信息,维度为(4,18,2)。
_grid_pts
我们再来看一下self._grid_pts(lane_pts, self.griding_num, w)干了啥。
def _grid_pts(self, pts, num_cols, w):
# pts : numlane,n,2
num_lane, n, n2 = pts.shape
col_sample = np.linspace(0, w - 1, num_cols) # 将宽分为num_cols个格子
assert n2 == 2
to_pts = np.zeros((n, num_lane))
for i in range(num_lane): # 遍历每个车道线
pti = pts[i, :, 1]
to_pts[:, i] = np.asarray(
[int(pt // (col_sample[1] - col_sample[0])) if pt != -1 else num_cols for pt in pti])
return to_pts.astype(int)
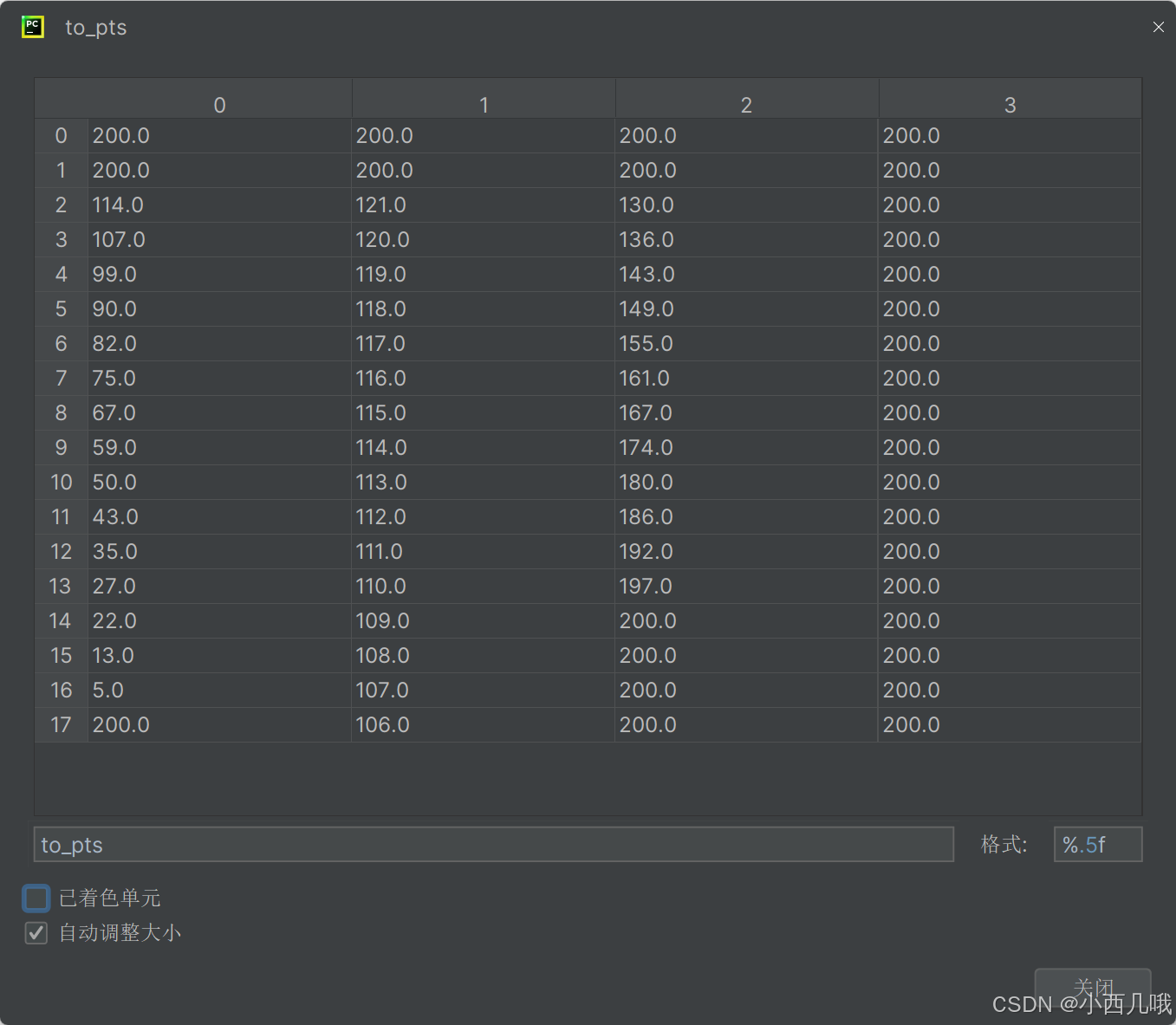
先获得图片的宽,然后给分割成200块。接着遍历每条车道线,判断一下它属于哪个格子。这里一共有201个值(0-200),200表示这行没有车道,其余值表示这行的车道点在哪个格子,如下图所示。最终得到to_pts,维度为(18,4)。
model
我们再看看看网络部分怎么搞的,在model.py的parsingNet的forward。
def forward(self, x): # (B, 3, 288, 800)
# n c h w - > n 2048 sh sw
# -> n 2048
x2, x3, fea = self.model(x) # x2(B, 128, 36, 100) x3(B, 256, 18, 50) fea(B, 512, 9, 25) # backbone提取特征
if self.use_aux: # 这里做的是辅助分割
x2 = self.aux_header2(x2) # (B, 128, 36, 100)
x3 = self.aux_header3(x3) # (B, 128, 18, 50)
x3 = torch.nn.functional.interpolate(x3, scale_factor=2, mode='bilinear') # (B, 128, 36, 100)
x4 = self.aux_header4(fea) # (B, 128, 9, 25)
x4 = torch.nn.functional.interpolate(x4, scale_factor=4, mode='bilinear') # (B, 128, 36, 100)
aux_seg = torch.cat([x2, x3, x4], dim=1) # (B, 384, 9, 25)
aux_seg = self.aux_combine(aux_seg) # (B, 5, 36, 100)
else:
aux_seg = None
fea = self.pool(fea).view(-1, 1800) # (B, 8, 9, 25) -> (B, 1800)
group_cls = self.cls(fea).view(-1, *self.cls_dim) # (B, 201, 18, 4) 201个分类 18个车道点 4个车道线
if self.use_aux:
return group_cls, aux_seg
return group_cls
第一块self.model(x)不用说了吧,就是backbone提取的三层特征图。
在辅助分割里,self.aux_header都是基本的卷积(conv->bn->relu),做好几个卷积然后上采样一下再做好几个卷积,最后给拼接在一起做几个卷积得到最后的aux_seg。
分类就更简单了,self.pool就是个基本的conv,self.cls就是两个全连接层(Linear->relu->Linear)。最后全连接层输出14472个值,在view为(B,201,18,4),分别表示201个分类,18个车道点和 4条车道线。
loss
最后就是我们的损失函数了,进入loss.py看看。
SoftmaxFocalLoss
def forward(self, logits, labels):
scores = F.softmax(logits, dim=1)
factor = torch.pow(1. - scores, self.gamma) # 权重 样本预测误差越小权重越小 误差越大权重越大
log_score = F.log_softmax(logits, dim=1) # 交叉熵
log_score = factor * log_score
loss = self.nll(log_score, labels)
return loss
这个就是分类损失,稍微做了一点改进。我们看到这里计算了一个factor,这有什么影响呢。比如你预测这个车道点有0.95的可能是的,这块训练的非常不错,不需要重点关注了,给你一个小点的权重吧,((1-0.95)×2)^2=0.01。预测的另一个车道点有0.65的可能是,这个就有点没把握了啊,你这块训练的不行啊,得多关注关注啊,也给你一个大点的权重吧,((1-0.65)×2)^2=0.49。这样模型会更多关注训练不好的地方,其实就是焦点损失(Focal Loss) 的思想
ParsingRelationLoss
def forward(self, logits):
n, c, h, w = logits.shape # (B, 201, 18, 4)
loss_all = []
for i in range(0, h - 1):
loss_all.append(logits[:, :, i, :] - logits[:, :, i + 1, :]) # 两个相邻的车道点概率接近
# loss0 : n,c,w
loss = torch.cat(loss_all)
return torch.nn.functional.smooth_l1_loss(loss, torch.zeros_like(loss))
由于车道是连续的,即相邻行的车道点应该彼此接近。因此,通过约束分类向量在邻行上的分布来实现连续性,公式如下。
ParsingRelationDis
def forward(self, x):
n, dim, num_rows, num_cols = x.shape # (B, 201, 18, 4) 200个位置的概率+最后一个判断有没有车道线
x = torch.nn.functional.softmax(x[:, :dim - 1, :, :], dim=1) # (B, 200, 18, 4) 最后一个去掉了
embedding = torch.Tensor(np.arange(dim - 1)).float().to(x.device).view(1, -1, 1, 1)
pos = torch.sum(x * embedding, dim=1) # 求期望(直接取最大值没办法反向传播)
diff_list1 = []
for i in range(0, num_rows // 2):
diff_list1.append(pos[:, i, :] - pos[:, i + 1, :]) # 两个相邻的车道点位置接近
loss = 0
for i in range(len(diff_list1) - 1):
loss += self.l1(diff_list1[i], diff_list1[i + 1])
loss /= len(diff_list1) - 1
return loss
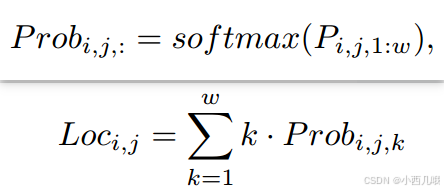
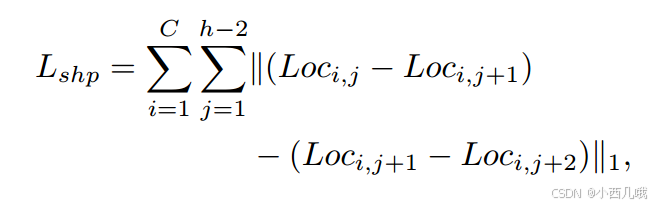
车道线通常是直线,或在曲线部分也会由于透视效应表现为直线,因此可以使用二阶差分方程来约束车道线的形状。直线车道线的二阶差分结果为零。车道线位置的计算是找到这行里分类预测的最大值。公式如下。

但是有个问题,就是argmax函数是不可微的,没法反向传播。所以作者用预测的期望作为位置的近似值。公示如下。
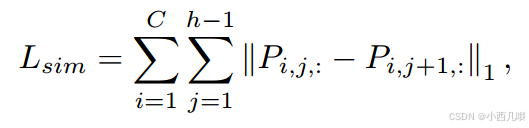
diff_list1存储的是相邻车道点之间的位置差异。得到了相邻位置差异就可以计算它们的二阶差分了。self.l1(diff_list1[i], diff_list1[i + 1]) 计算相邻两个差异之间的 L1 损失。这里计算的是 二阶差分,即通过计算相邻车道点之间的差异,再对这些差异的差异进行惩罚,迫使车道线更加平滑。公式如下。
通过约束相邻车道点的位置接近,促进车道线的平滑性,进而引导模型预测连续、平滑的车道线。
demo
最后在demo里配置自己的.pth文件和测试数据就行。
if cfg.dataset == 'CULane':
# splits = ['test0_normal.txt', 'test1_crowd.txt', 'test2_hlight.txt', 'test3_shadow.txt', 'test4_noline.txt', 'test5_arrow.txt', 'test6_curve.txt', 'test7_cross.txt', 'test8_night.txt']
splits = ['mytest.txt']
datasets = [LaneTestDataset(cfg.data_root, os.path.join(cfg.data_root, 'list/test_split/' + split),
img_transform=img_transforms) for split in splits]
img_w, img_h = 1640, 590
row_anchor = culane_row_anchor
例如我就是用的CULane,然后将splits改为我自己的mytest.txt。给你们看一下我的mytest.txt。
我自己的mytest.txt和代码里注释的都在CULane\list\test_split路径下,大家可以自己改。
=======================================================================================================
最近买了个新玩具Jetson Nano,就是一个开发板,可以部署人工智能的模型的。开发板是基于ubuntu的,我正好也想玩玩linux系统,因为好多模型都是基于linux不支持windows。开发板前天刚到手,这两天算是给我逼疯了,疯狂踩坑,安装系统,部署docker简直各种bug。如果是我哪里的配置出错了我都认,最顶不住的就是我找了半天的问题最后发现是版本不对,两眼一黑…
万事开头难吧,慢慢度过这个困难期

















 884
884

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









