






 本文探讨了汽车诊断中并行刷写的概念,通过对比诊断CAN口与ETH口(DoIP)刷写车身控制单元(BCM)的时间差异,指出DoIP在速度上的优势并不显著。然后,提出了通过网关实现并行刷写的设想,强调了网关在处理逻辑地址映射和数据包序列方面的关键作用。作者通过CANoe和vTESTstudio的实例展示了并行刷写的可能性,指出这种方法有望大幅减少刷写时间,推动汽车诊断技术的进步。
本文探讨了汽车诊断中并行刷写的概念,通过对比诊断CAN口与ETH口(DoIP)刷写车身控制单元(BCM)的时间差异,指出DoIP在速度上的优势并不显著。然后,提出了通过网关实现并行刷写的设想,强调了网关在处理逻辑地址映射和数据包序列方面的关键作用。作者通过CANoe和vTESTstudio的实例展示了并行刷写的可能性,指出这种方法有望大幅减少刷写时间,推动汽车诊断技术的进步。
刷写,对于汽车诊断工程师们来说就像是家常便饭,行业内对刷写的定义是用于ECU的软件更新(APP程序),相信大家也一定在网上扒过不少讲它更新流程的文章,如:34服务、36服务等等,那我们今天就来点不一样的,今日唠嗑话题:并行刷写。
在谈论并行刷写前,小怿先抛出一个问题:通过网关的诊断CAN口与ETH口去刷写CAN样件(如车身控制单元:BCM),刷写所耗费的时间有差别吗?如图1所示。

图 1 刷写模式简图
“当然有区别啦,毕竟后者是通过DoIP的,DoIP传输的数据较快,所以后者的耗费时间是比较短的。”大家是不是都是这种看法呢?小怿有不同的看法:DoIP传输快,36的数据包一帧就传完,但是网关会通过诊断路由模块转化为CAN报文,完成刷写流程;而诊断CAN口刷写也是网关转化为CAN报文,完成刷写流程,因此对于诊断CAN口刷写车内CAN节点而言,ETH口貌似也没有提升多少速率。
既然通过网关的诊断CAN口与ETH口分别去刷写车内CAN节点的时间一致的话,那么ETH口的优势在哪儿呢?这里,小怿又要提问啦:DoIP传输速率快,那么在DoIP报文传输完成,网关路由诊断CAN报文时,诊断仪与网关需要保持何种通信呢?
学霸们一定知道,答案就在怿星科技的往期推文《汽车以太网诊断路由深度排雷》中,文章在网关如何处理DoIP大包数据步骤中提到:
-
网关接收并解析完诊断仪发送的诊断数据(DoIP数据)后,向诊断仪发送诊断ACK报文;
-
并以DoCAN/CANFD报文格式向车内目的ECU转发诊断请求数据,此时需遵循ISO 15765 CANTP多帧传输机制首先向ECU发送诊断请求首帧,待接收到ECU回复的流控帧后发送后续诊断请求连续帧;
-
若诊断请求数据传输时间过长(大于P2Server),则网关需要在P2Server时间内向诊断仪发送一条NRC为0x78的诊断否定响应;
-
后续若在P2*Server时间内诊断请求数据发送仍未结束,则网关仍需按照既定规则向诊断仪发送NRC为0x78的否定响应(一般以1/2 P2*Server周期发送),直至诊断请求数据发送完成。
如图2所示,总结上述了过程。
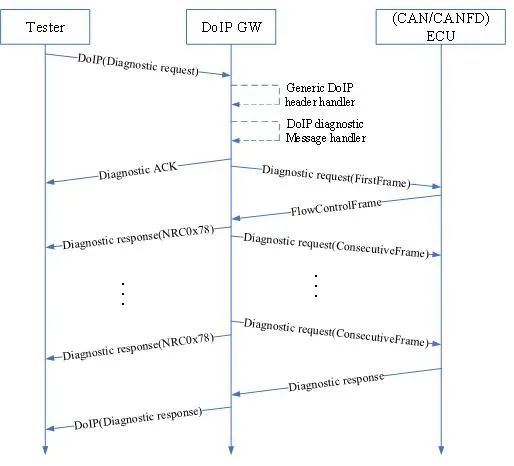
图 2 多帧诊断请求转发
既然网关在DoIP转CAN报文时,会先给诊断仪一个ACK响应,对车内CAN节点进行多帧数据包信息传输的同时给出NRC0x78,让诊断仪进行等待。那么此时提出个大胆的想法:诊断仪此时能否开启另一个线程去刷写另一通道上的ECU呢?
对于常规的网关而言,诊断路由只是拆包组包及路由转发的功能,若是要实现上述的想法,此时对于网关功能点的需求需进一步完善。
功能点一:网关内部需要处理DoIP中逻辑地址与CAN节点物理寻址的映射速率增快,同时确保地址信息不冲突。网关在传输数据包过程中,必然出现CAN通道1与CAN通道2上ECU的诊断响应报文同时反馈给网关的情况,因此在处理同一时刻的响应报文时,应遵循队列原则,逐一将诊断响应报文组装成数据包的形式封装成DoIP报文转发给诊断仪。
功能点二:网关向车内不同通道上ECU传输数据包信息时不出现序列错误,即在传输CAN通道1上ECU的诊断数据不能传输到CAN通道2上去。网关在实现并行传输数据包时,需要根据DoIP数据包中的逻辑地址,拆分DoIP的数据包封装成对应CAN通道上节点的多帧数据包,从而实现在不同CAN通道上都可同时进行数据包传输的功能,满足并行刷写的基本需求。
若网关的功能需求满足上述两个功能点,且诊断仪的功能开发完善,即可实现在不同通道上同时进行诊断刷写的功能,达到并行刷写的目的,如下图所示。
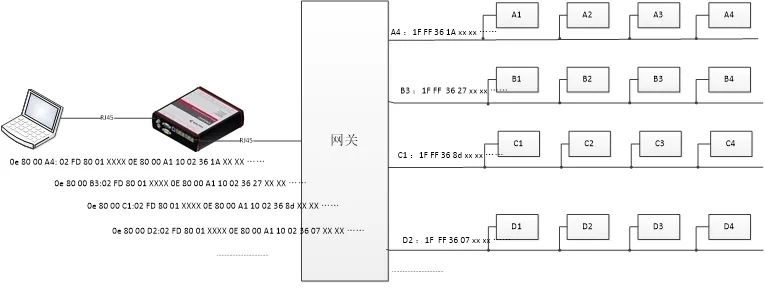
图 3 并行刷写示意图
既然DoIP对于车内ECU一对一的刷写在时间上并没有提升,那么若能用上述的方法针对一对N的前提下岂不是大大节省了刷写时间?此时有些小伙伴会冒出一个想法:既然DoIP能如此实现,那诊断CAN口能实现该类行为吗?
针对此类想法,小怿早就实践过了,若是诊断CAN口也按照这类做法其实并不会减少多少的传输时间,因为诊断CAN进行36服务传输数据的时候有多帧的情况出现,所以并不会减少相应传输的时间。相比较而言,这里体现出的是DoIP一帧传大包的能力。
想法如此美好,诊断仪上位机该如何实现呢?来,跟着小怿,我们一起来实践一下吧~
此处小怿根据两个大家熟悉的软件:CANoe + vTESTstudio,CANoe作为执行软件,vTESTstudio作为代码编辑软件,介绍刷写上位机实现方式。框架如下图4所示。
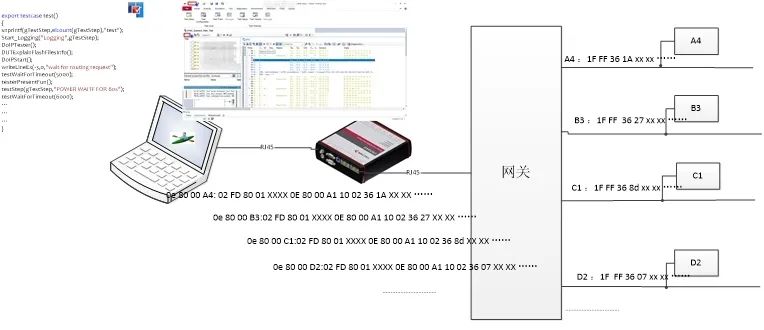
图 4 代码执行框架示意图
此处难点有两处:
1. 如何处理在以太网通道上去传输不同CAN通道的DoIP数据包发送且不会造成丢包;
2. 如何处理在以太网通道上去接收不同CAN通道的DoIP数据包且不造成线程的拥塞。
借助vTESTstudio 4.0版本中的函数:testStartParallel实现以太网通道上同时传输DoIP数据包;同时采用环形队列方式执行发包机制,避免丢包问题。
vTESTstudio中调用CANoe自带的DoIP.dll去实现DoIP层与UDS层的函数封装,满足DoIP报文正常收发功能,利用DoIP层逻辑地址唯一性区分各诊断响应。
解决上述两个问题后,通过自身编写好的代码执行并行刷写序列,实现结果如下图5所示。
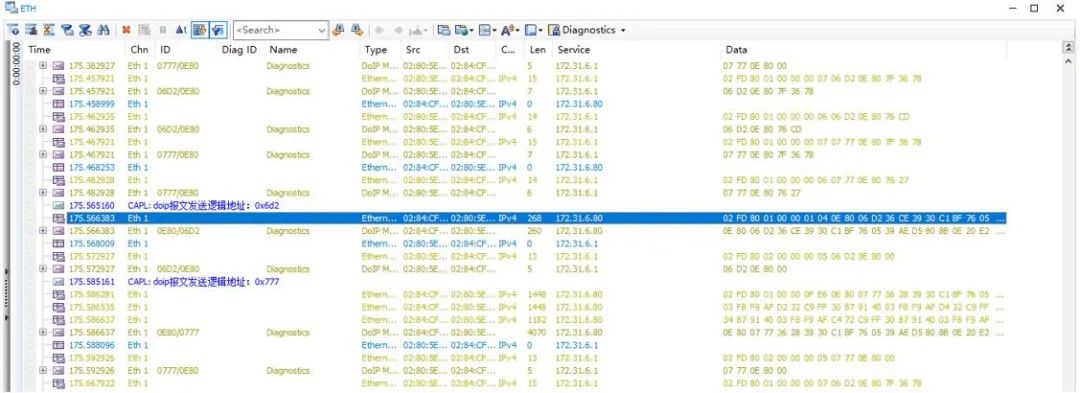
图 5 并行刷写Log示意图
综上所述,随着DoIP技术越来越成熟,并行刷写这种减少工程师工作量与工作时间的机制会越来越普及,相信汽车诊断工程师的黎明也会越来越近的。


















 1060
1060

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









