






 文章介绍了三种静态杂波滤除算法:零速通道置零法,动目标显示(MTI)和相量均值相消算法。MTI利用相位差消除静态目标,而相量均值相消算法通过求平均和做差提升动目标信噪比。这两种方法在抑制静止目标方面有不同效果。
文章介绍了三种静态杂波滤除算法:零速通道置零法,动目标显示(MTI)和相量均值相消算法。MTI利用相位差消除静态目标,而相量均值相消算法通过求平均和做差提升动目标信噪比。这两种方法在抑制静止目标方面有不同效果。
一、静态杂波滤除算法:
(1)零速通道置零法
零速通道置零法,是指在2D-FFT(速度维FFT)后直接将R-V谱矩阵(RD图)速度通道中的零速通道或零速附近通道置零,此操作意味着静止目标或者低速目标会直接从R-V谱矩阵中消失。零速通道置零法操作简单,易于理解。
(2)动目标显示(MTI)
MTI是雷达工程师们熟稔于心的雷达信号处理算法,基本上没有不了解的。MTI是指利用杂波抑制滤波器来抑制杂波,提高雷达信号的信杂比,以利于运动目标检测的技术。由于杂波谱通常集中在直流分量和雷达重复频率的整数倍处,而 MTI 滤波器利用杂波与运动目标的多普勒频率的差异,使得滤波器的频率响应在直流和PRF(脉冲重复频率) 的整数倍处具有较深的阻带, 而在其他频点的抑制较弱, 从而通过较深的“凹口”抑制静止目标和静物杂波。在实验中,通常采用两脉冲对消器,也称一次对消器,其滤波器结构如下图3所示。
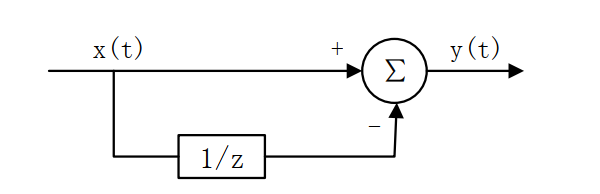
MTI的核心原理就是静止目标的相位不会发生变化,而运动目标的相位与静止目标不同,因此相邻两个脉冲做差会把相同的相位值减掉,留下的就是运动目标的相位,从而达到滤除静止目标的功能。
(3)相量均值相消算法(平均相消算法)
相量均值相消算法,也被称为平均相消算法,其实现的原理为:静止目标到雷达天线的距离是不变的,每一束接收脉冲上静止目标的时延也是不变的,对所有接收脉冲求平均就可以得到参考的接收脉冲,然后用每一束接收脉冲减去参考接收脉冲就可以得到目标回波信号,核心思想是求均值做差。
二、总结
综上所述,MTI和相量均值相消算法两种算法在原理的核心思想上有些许近似,最大的区别为:MTI是直接利用相位的差值消除静态杂波,而相量均值相消算法是通过相量叠加再求平均然后做差,去除静态杂波。因此MTI仅仅是抑制了静态目标的相位,对于微动目标不友好。而相量均值相消算法则通过求均值,在抑制静止目标相位的同时极大提高了动目标或者微动目标的信噪比。
reference:
雷达信号处理算法:静态杂波滤除(附MATLAB代码和数据) - 知乎 (zhihu.com)
(87条消息) 自动驾驶传感器---毫米波雷达原理(测距、测速、角速度测量),毫米波雷达系统构成_打怪升级ing的博客-CSDN博客_毫米波雷达原理

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









