





毫米波雷达的发展趋势是智能+高分辨
做好一款毫米波雷达本身是一个庞大的系统工程,所以我不可能会像标题那样面面俱到讲毫米波雷达的方方面面,我也没那本事 ,好吧,这篇文章主要和大家聊聊如何从算法及功能层面做好4D 高分辨毫米波雷达(4D High Resolution Radar,以下简称4D Radar),咱们开始。
,好吧,这篇文章主要和大家聊聊如何从算法及功能层面做好4D 高分辨毫米波雷达(4D High Resolution Radar,以下简称4D Radar),咱们开始。
啥是4D Radar
首先4D指的是(range, velocity, azimuth,elevation),有时候有的厂家为了唬人,加上RCS这个维度,就成了5D radar,那么4D Radar相较于传统毫米波雷达主要强势在这一个方面:
cluster数目是传统雷达的数十倍(一般为数万cluster/秒),如此致密的cluster也就换了一个更洋气的名字,点云(point cloud),隔壁激光雷达可能会投来鄙视的目光。。。
需要指出的是,做毫米波雷达不会一味追求点云数量,一味追求点云计算量上去了不说,也产生了许多冗余信息,没必要。所以,这里的点云是指有效点云,也就是说,我们不仅要看点云的量,更要看点云的质。那如何提高点云数量及质量我们待会再聊。如此致密的点云使得4D雷达有时候又被称为4D成像雷达(4D Imaging Radar)。
4D radar 能干啥
说白了,4D毫米波雷达最强势的点就是提供高质量的点云,而高质量的点云却极大得扩展了毫米波的应用范围。过去啊,毫米波雷达最多在ADAS混出个样,也就是在L2,L3级别的自动驾驶刷刷存在感。再往上走,也就是高级别无人驾驶(L4,L5)就惨啦,低声下气,一直要看激光雷达的眼色,甚至还比不过摄像头。即是好说歹说配备了毫米波雷达,往往也是做陪衬(数据融合,实际中对毫米波雷达的输出往往置信度较低)。怎么办,想出人头地就得猥琐发育,卧薪尝胆。如今,4D Radar的推出无疑为毫米波雷达家族进入高级无人驾驶铺平道路,提供了更多可能性!主要是4D雷达太能干了,不信请看:
环向毫米波雷达感知
Freespace
自动泊车(APS)
目标分类(Classification)
局部定位(Localization)
landmark based SLAM
以上功能都是过去毫米波雷达薄弱的点,也就是激光雷达鄙视毫米波雷达的底气。往后我会逐一介绍每个功能应用的实现细节等。
4D radar 目前什么水平
目前国内外知名雷达厂商都在积极布局4D Radar,因为它确实代表未来的感知技术方向。国内玩家主要是先搞个样机,展现一下强大的研发实力,估计也可以解决部分融资需求,但离量产还有距离。图1 是国内森斯泰克点云雷达实测效果图,可以看到点云及其致密,为丰富应用提供基础。
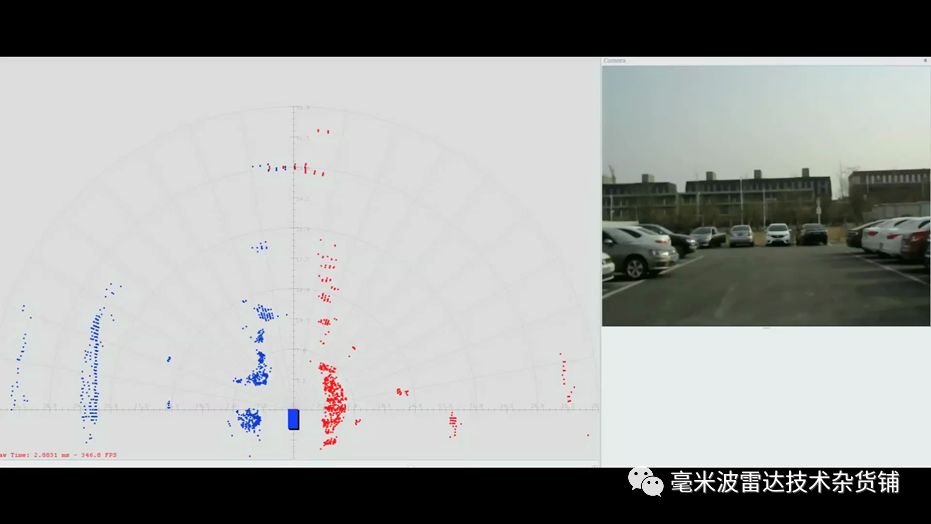
图1 Sensor Technologies 4D Radar
如图2所示,木牛科技于2019年也发布了一款点云雷达样机,点云致密并且提供了高度(elevation)信息。
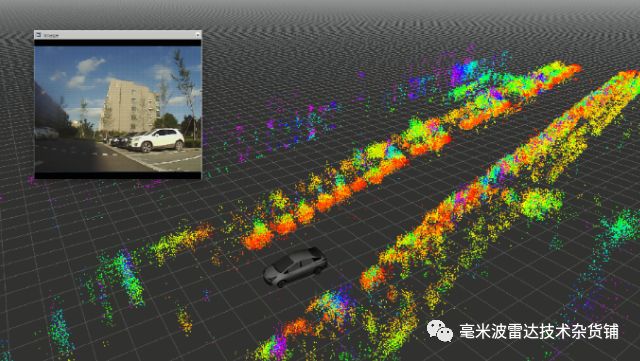
图2 木牛科技4D radar效果图
国外玩家更多,玩法也多种多样,以后有空细聊,这里简单介绍几家有特色的。METAWAVE是当中戏比较多的,核心技术是利用超材料构建收发阵列,基于pencil beam的窄波束覆盖整个FoV,并在算法层面引入AI Engine,实现一款高分辨智能雷达。
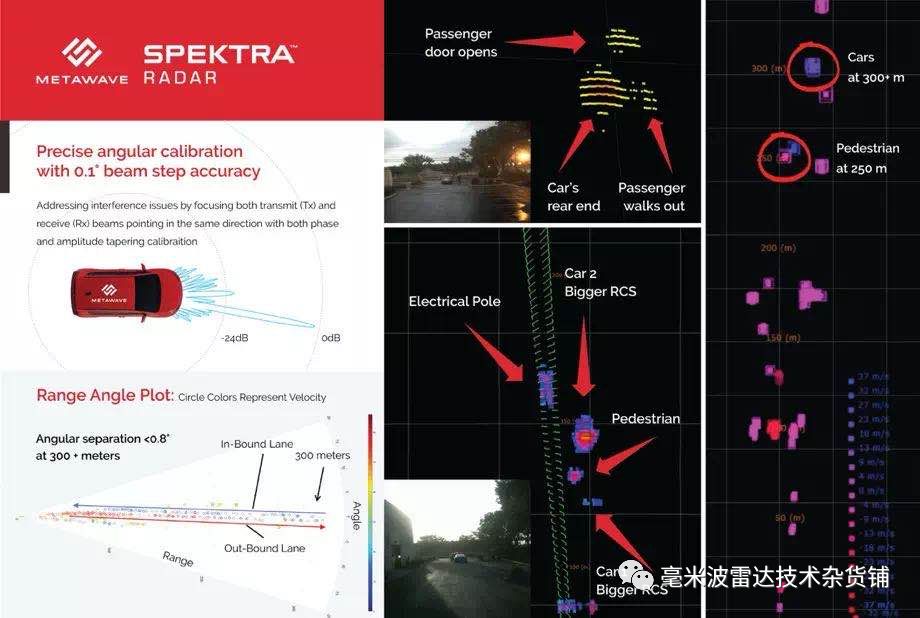
图3 METAWAVE 点云雷达效果图
此外,Cognitive,Arbe,Oculii,Uhnder,Vayyar,Lunewave,Echodyne等公司都在相继研发4D Radar.
4D radar 算法怎么做
涉及雷达算法,我们暂且分为数据处理及信号处理,信号处理偏底层,更重要更基础。我们会把重心放在这。
雷达信号处理(Radar Signal Processing,RSP),主要要包含如下几个方面
RSP
- Antenna Array Design (Azimuth/Elevation)(ULA/NLA/MRA)
- MIMO Signal Processing(Channel Separation)
- Frequecy Estimation for Range & Doppler
- DoA(FFT/MUSIC/SSP)
- Calibration
Antenna Array设计依赖功能需求,就4D Radar而言,给出的天线设计需要满足无模糊方位角及俯仰角检测条件外,对方位角的分辨率及精度提出高要求,往往分辨率要低于2度。
MIMO Signal Processing核心问题是如何实现接收端发射通道分离,方法有很多,诸如BPM, TDM,CDM等等,但是各有各的问题,如何实现适合4D雷达的通道分离方案很重要。
Frequecy Estimation for Range & Doppler,对距离和速度的估计主要采用FFT+插值细化,对传统毫米波雷达是够了,而4D Radar还有上升空间。
DoA,可以说是RSP最重要的一块,没有之一,DoA方法太多了,但是结合天线设计,给出一种高效,高分辨的DoA方法是具有相当挑战性的,主流还是ULA+FFT,4D雷达为了高分辨,这种配置是不够的。
Calibration,校准对于多通道是必须的,校准对象,校准方法很多。比如
Channel Error |
Coupling Error |
Position Error |
Mount Error |
Finite sampling errors |
之后的文章会主要聚焦到这些技术的分析上及最新技术的分享,敬请期待。















 2987
2987











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









